渔业论文

0 引言
我国是世界上唯一一个养殖产量超过捕捞产量的国家,也就决定了在今后很长的一段时间里我国渔业将以水产养殖为主.我国主要淡水养殖方式中,池塘养殖产量占淡水养殖的 70. 3% ,面积占淡水养殖的42. 9% .但是,目前池塘养殖自动化程度不高.20 世纪 80 年代开始有池塘各种自动投饲机相应问世,90% 以上是投放固体颗粒型饲料,投饲抛撒半径 1. 5~ 5m[1].投饲机应用的主要方式是定点投饲,受投饲半径以及投饲均匀性并不理想等因素的限制,投饲机在池塘养殖中的实际配备量并不高,投饲环节仍以人工投饲为主.抛撒均匀度一直是评价投饲效果的重要指标[2],投饲不均匀将造成饲料浪费、污染水体等一系列问题.因此,均匀投饲成为了一个亟待解决的问题.
本文根据池塘养殖的特点,设计了自动导航船,根据大量的实验分析,确定了设计参数与结构.经过测试验证,其自动导航精度符合要求,可用于搭载池塘投饲机、池塘增氧机等,以实现池塘均匀投饲与均匀增氧.
1 超声波 / 电子罗盘组合导航原理
1. 1 系统硬件结构
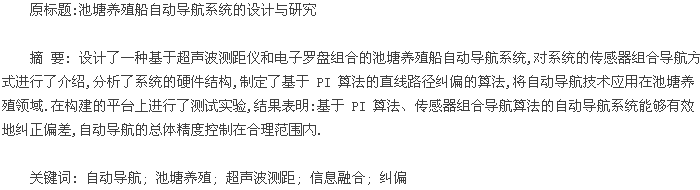
导航系统硬件主要由超声波水下测距仪、航向测量 模 块 DCM260B、超 声 波 测 距 传 感 器、基 于STC12C5A60S2 架构机构及电源等部分组成,如图 1所示.由于超声波在水中传播速度是空气中的 3 倍多,相对衰减速率慢,因此使用 ZMY - 100 超声波水下测距仪来测量船侧与岸边距离.该测距仪量程达到0.5 ~100m,最大测量误差 ±0.2%,采样频率15Hz,数据由 RS232 串口输出.航向测量模块 DCM206B 自带硬铁校正和软铁校正模块,航向精度 ±0.8°,采样速率1Hz,采用 RS232 串口输出.由于超声波水下测距仪量程大,测距探头比较大、安装不方便,而且价格高.因此,根据船头测距的实际需要,选用低成本的超声测距传感器可以达到测距要求.这款传感器是空气使用的,换能器是陶瓷材质,量程 0. 01 ~ 10m,精度 ± 0. 03mm,测量频率 500Hz,输出接口为 TTL 串口.
1. 2 设定路径下系统工作原理
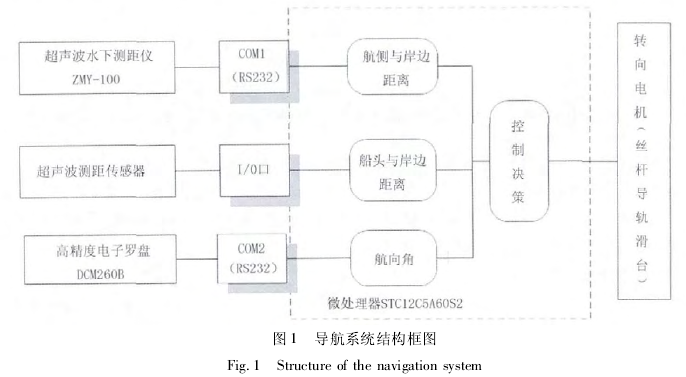
本文采用了"相对位置、姿态角检测部分 + 单片机控制部分 + 转向机构控制部分"三级结构来构建整个自动导航系统.该系统中参考船与池塘岸边的距离确定船在池塘中的位置,电子罗盘检测船的姿态角,单片机根据船的相对位置和航向角发送控制指令,转向机构控制部分执行单片机发送的指令,使船以设定路径行驶,如图 2 所示.超声波水下测距仪测距探头水平安装在船的左侧,指向与船头指向呈 90°,并且保证行驶中探头始终在吃水线以下.工作过程中,超声波水下测距仪测量与参考岸的距离,系统根据该距离确定自身相对位置,从而进行航向调整.超声波测距传感器安装在船头并且与船头指向相同,当船头距离目标岸边距离达到设定距离,单片机运行对应程序,转向机构执行 U 形转弯指令.U 形路径采用定时、定舵偏转角度方式实现,具体偏转角度和保持时间根据实验测得.若给定舵偏转角度为 25. 80°,维持时间为 18. 71s 后回正舵向.U 型转弯的转弯半径为 5m,该半径根据投饲机投饲半径确定.
2 纠偏算法及纠偏程序设计
2. 1 偏差情况分析
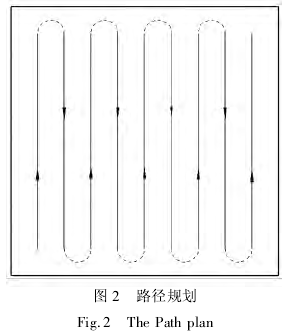
直线路径规划以池塘岸作为参考,如图 3 所示.
图 3 中,点画线即为导航船参看岸边距离 d 拟行驶的直线路径.船与岸边距离有偏差时需要进行判断并做出相应调整,可能出现偏差的情况有 6 种,如图 3 所示.图 3 中,箭头指向代表船头指向,箭头位置代表船的位置.其中,1、3 所代表的航向与的位置组合的情况下,船正在向标准直线逼近,不需要进行调整;2、4 代表的航向与位置的组合的情况下,船正在远离标准直线路径,需要进行相应调整;5、6 代表的情况仍存在位置偏差,应该根据偏差大小进行调整.
2. 2 纠偏算法
PI 算法是本文路径纠偏的理论基础.PI 算法公式[3]为

其中,e(t)表示输入;u(t)表示输出;Kp是比例系数;Ki是积分系数;t 是积分时间.
本文中采用位置偏差| ε(t) | 作为 PI 输入,输出 n(t).n(t)作为步进电机执行的脉冲个数,执行机构执行该操作指令实现舵角偏转,从而改变或保持当前航向.其中,α(t)表示航向偏差,并且规定航向左偏(图3 中 2、3 箭头指向),则α(t)< 0;右偏(图 3 中 1、4 箭头指向)则α(t)> 0.规定位置在左侧的偏差( 图 3 中1、2 位置所示),则ε(t)< 0;位置在右侧的偏差(图 3中 3、4 位置所示),则ε(t)> 0.首先判断偏差 ε( t) 是否在允许偏差范围( ±0. 03)内,如果在该范围内,就不做调节.否则,进行下一步判断:当ε(t)·α(t)≥0时,船在水中的位置和航向就是图 3 中对应 2、4、5、6中的一种,此时需要做相应调整;再根据位置偏差ε(t)> 0,则调整航向至左偏,ε(t)< 0,则调整航向至右偏.纠偏程序设计流程如图 4 所示.
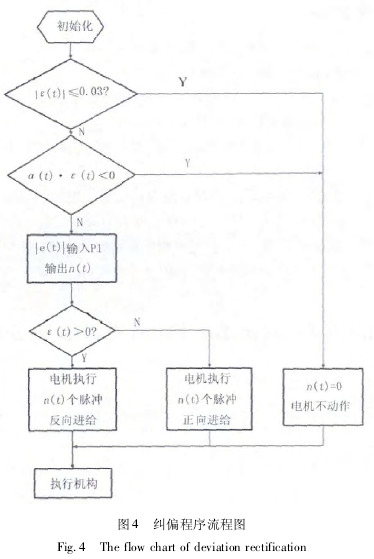
以偏差距离作为 PI 的输入、航向调整作为输出的工作模式,在系统纠偏前期,出现位置偏差较小,航向偏差较大的情况下,可能不能通过一次调节将航向调节到理想状态;根据调整后的偏差距离和船头指向实时判断是否已经纠正了当前的航向,即判断ε(t)·α(t)的正负;如果还没有纠正,再次进行调节,直到偏差得到纠正.
3 试验研究
3. 1 试验设备
本文试验平台为自己搭建的试验船,长 3m,宽1. 06m.试验平台总质量 203. 5kg,采用电动舵桨驱动,在船尾 部 中 心 处 安 装,水 面 行 驶 速 度 保 持 在0 . 5 ~ 0. 7m / s,可认为做匀速运动.
3. 2 试验内容及步骤
本文进行的试验为:直线路径纠偏效果测试试验.试验步骤如下:
1) 电子罗盘校准,测量出参考岸方向,并输入到单片机中;检测各个传感器,确保系统运转正常.
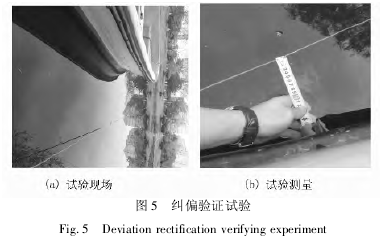
2) 拉直百米绳与参考岸方向平行,试验场地如图5 所示.百米绳上每 1m 处有一标记,在船上测量船侧距离百米绳上标记点的距离,测量方向与船舷垂直,用来记录船每行驶 1m 的横向偏差.
3. 3 试验分析
测试结果如图 6 所示.
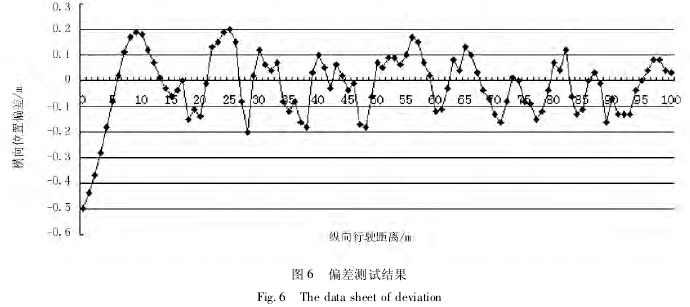
随着纵向行驶距离变化,基于超声波测距和电子罗盘组合的自动导航系统存在一定的超调和震荡,震荡收敛在标准路径的 ± 0. 2m 的区间内.其稳态时最大偏差为 0. 2m,说明该自动导航系统精度达到了亚米级精度.考虑到水底的环境复杂、参考岸的不平整和自动导航技术在池塘养殖领域相关的研究还没有普及等因素,该导航精度可以接受.
分析产生超调的原因:船刚刚启动,前期速度较慢,系统对位置的修正比较缓慢,对航向过度调节;随着速度增加至匀速,航向的过调使位置偏差变大.系统进入稳态运行后,产生振荡的原因同风速的扰动和水下测距环境有关,而测距传感器本身的精度也对该结果有一定影响.
4 结论
1) 通过对池塘养殖特点的分析,设计开发了自动导航系统.该系统导航自动精度达到了亚米级,符合投饲、增氧的要求.
2) 农业自动导航中普遍使用基于 D - GPS 导航的方式,开发成本高[4 - 5].本文采用航位导航的方式,开发成本低,具有良好的经济预期.
参考文献:
[1] 葛一健. 我国投饲机产品的发展与现状分析[J]. 渔业现代化,2010,38(4):63 -65.
[2] 周晓林,焦仁育. 渔业自动投饲机类型、结构原理与应用[J]. 渔业现代化,2003(6):46 - 47.
[3] 吴士昌,吴忠强. 自适应控制 [M]. 北京:机械工业出版社,2005:65 -69.
[4] 李建平,林妙玲. 自动导航技术在农业工程中的应用研究进展[J]. 农业工程学报,2006,9(22):232 -236.
[5] 刘兆祥,刘刚. 基于自适应模糊控制的拖拉机自动导航系统[J]. 农业机械学报,2010,41(11):148 -152.

我国优良淡水养殖品种基本上都是杂交繁殖育种而来的,这些水产品肉质鲜美、易养殖、成活率高,是我国在生物科技方面的傲人成果,同时也使我国的水产养殖业效益显著。...

通常将规格为50~250g的小鳖称为幼鳖,幼鳖养殖是养鳖生产中十分重要的阶段,是承接稚鳖培育和成鳖养成的重要环节,它直接影响到成鳖的养殖成效。在幼鳖的池塘养殖管理中,要注意做好以下六个方面的工作。1科学放养放养的幼鳖要求体质健壮、无病无伤,同一池内...
0、引言制卵形鲳鲹属于鲈形目(Perciformes)、鲈亚目(Percoide)、鲹科(Carangidae),鲳鲹亚科(Trachinotinae)、鲳鲹属(Trachinotus),俗称黄腊鲳、短鳍鲳鲹、金鲳、红三、红沙等.主要分布于印度洋、印度尼西亚、澳洲、中国南海、东海、黄海、渤海、日本...

当前水产养殖行业在我国正处于快速发展阶段,水产养殖的规模和类型也处于不断拓展状态,对水产养殖的总体技术水平的要求也在不断提升。其中将自动巡航船应用到水产养殖当中对于提升水产养殖整体水平有着非常重要的作用。本文就自动巡航船的水产养殖技术展开研...
雨生红球藻Haematcoccuspluvialis能大量积累优质虾青素,是一种高价值经济微藻。在培养时,采用绿色细胞培养和转红培养两步法进行,绿色细胞的高效培养是生产虾青素的首要环节。先提高雨生红球藻生物量、后进行诱导转红可获得比一步培养更高产量的虾青素。...
葛氏鲈塘鳢俗称老头鱼、山胖头,系东北地区优质小型经济鱼类,无肌间刺,肉质细嫩,营养丰富特别是DHA含量极高,深受食客喜爱。近年来,葛氏鲈塘鳢自然资源量下降,葛氏鲈塘鳢的市场价格节节攀升,同时也成为了新兴的水产养殖热点。现将葛氏鲈塘鳢生态养殖技...

太阳能作为取之不尽、用之不竭、清洁无污染的可再生能源,其开发利用受到了普遍关注。我国作为世界上最大的水产养殖国,所需要的渔业机械,如增氧机等的数量庞大,电力消耗严重。...
大鳞鲃(Barbuscapito)属于鲤科、鲃亚科、鲃属。大鳞鲃原产于乌兹别克斯坦的阿姆河,2003年首次引入我国。经北方池塘养殖,为广温性鱼类,具有肉质细嫩、味道鲜美的特点,蛋白质含量达到20.27%。经测量肌肉中含有17种氨基酸,含量为72.22%,生长发育温度在0~30℃,适...
海藻场生态系统是典型近岸浅海生态系统之一,利用大型海藻吸收、固定,并转移海水中的碳、氮、磷等生源要素,减轻水域富营养化,同时形成多种海洋生物生长、栖息的局部稳定的小生境,达到增加生物多样性,修复渔业资源的目的[1-9]。近年来随着海洋环境污染...
虾夷扇贝(Patinopectenyessoensis)属滤食性双壳贝类,软体动物门,瓣鳃纲,异柱目,扇贝科,扇贝属。原产于俄罗斯千岛群岛南部水域、日本北海道及本州北部,为大型冷水性贝类。虾夷扇贝生长速度较慢,贝壳较大,达10cm以上。闭壳肌可制作名贵的海产品干贝,属海产八...