航天工程论文

摘 要: 根据无人机技术特征和作战使用特点,对无人机自主性进行科学、系统、定量评价具有重要的军事意义。从哲学、技术两个角度,剖析了自主性内涵的演变,从作战使用、技术发展、科学量化3个方面分析了自主性评价的军事需求;归纳了无人机自主性评价方法的国外研究新进展,基于评价对象、人机关系等方面得出对比分析结论;指出了无人机自主性评价方法的发展趋势。
关键词: 无人机; 自主性; 评价方法;

0、引 言
当前,无人机作为信息化特征显着的新型作战装备,已经成为局部战争和军事行动不可或缺的重要作战力量。无人机种类越来越多,任务领域不断拓展,任务类型越来越广泛,已经逐步从安全性空域执行情报/侦察与监视(ISR)任务向对抗性空域执行主流作战任务发展,逐步从单机作战向多机集群作战发展[1]。无人机系统机上无人、复杂任务以及高对抗战场环境决定了无人机必须具备很高的自主性,自主性能力成为无人机的典型作战能力,体现了无人机处理不同任务与环境的复杂性、动态性和不确定性的能力以及人机交互程度。面对种类复杂、型号众多的无人机系统,科学构建无人机的自主性评价标准体系,科学构建无人机自主性评价标准体系,提出适合无人机技术特征和作战使用特点的自主评价方法,具有迫切的军事需求。
本文针对近年来国外无人机自主性评价方法的研究进展进行综述,从哲学、技术角度两个方面剖析自主性内涵的演变,从作战使用、技术发展、科学量化三个方面分析自主性评价的军事需求,总结和归纳无人机自主性评价方法的国外研究新进展,指出无人机自主性评价的发展趋势。
1、 自主性内涵的演变
自主性源于英文autonomy,含义为self-government or the right of self- government;self-determination,即自主权:自我管理的权利或自主决定权。自主性是行为主体按自己意愿行事的动机、能力或特性,在哲学、政治学、自然科学等多个学科领域都有关于自主性的描述。不同的学科领域,行为主体不同,对自主性内涵的描述不尽相同。
1.1、 自主性的哲学理解
亚里士多德、康德、马克思等思想家分别从政治、伦理学、哲学的角度对自主性的概念进行了哲学考察[2]。亚里士多德认为自主性是自给自足,体现在不受外在因素支配上。康德认为自主性是人的一种重要的主体能力,体现在人的意志上及采取自主的行动。马克思在人的活动中理解自主性,认为自主性是作为主体人的一个本质特征或特性,受其外在因素和周围环境影响。可以看到,他们从不同角度指出自主性是人在实践活动中体现出来的主体特性之一,环境因素影响自主性,自主性并不是随心所欲,而是以承认客体制约性和主体自身内在限定性为前提。
1.2、 自主性的技术内涵
自主性的哲学理解是从人的角度理解自主性,指出了自主性是自身的主体特性,受环境因素影响,受内在条件约束,这对于理解无人机的自主性内涵具有启发意义。从美军2000年率先提出自主作战(Autonomous Operations)概念以来,国外针对无人机自主性的技术内涵不断丰富和完善,其内涵演变可以归纳为以下几类:
1)《无人系统路线图2007—2032》中指出自主性内涵表现在所有无人系统的两个方面,一方面要能提供最小化的人员配备和宽带需求,并能使操作的战术范围超过视线;另一方面是在多个机器间的合作(或协作)协调[3]。
2)美国国家标准和技术研究所无人系统自主性等级工作组(Autonomy Levels for Unmanned Systems,ALFUS)指出自主性是无人系统拥有感知、观察、分析、交流、计划、制定决策和行动的能力,并且完成人类通过人机交互布置给它的任务[4,5]。自主性可以根据任务的复杂性、环境的困难度和为了完成任务进行的人—机交互程度等因素来区分其等级,进而表示出无人系统自我管理的状态和质量。
3)美国学者Panos J. Antsaklis等指出自主意味着具有自治能力[6]。自主控制器在执行控制功能时拥有自我支配的能力和权限。自主控制器由一系列硬件和软件构成,能够在脱离人的干预活动的情况下,在一段时间内持续完成必要的控制功能。
4)2012年7月美国国防科学委员会发布的《自主能力在国防部无人系统中的地位》报告认为,自主性是无人系统能够自动完成某种特定动作,或者在程序规定范围内,实现自我管理的一种或一组能力[7]。“世界上并不存在完全自主的无人系统,所有的自主无人系统都是人—机联合认知系统”,自主性并不是指无人系统独立完成任务,而是要考虑人—机协作问题。
5)2016年6月美国国防科学委员会发布的《自主性》研究报告认为,自主性是向一个实体授决策权、使该实体有权在指定范围内行动生成结果,即自主性是在没有外来干涉的情况下自由做出决定[8]。就本质而言,驾驭自主性就是考验人是否愿意放弃控制权。
综上所述,笔者将自主性的技术内涵归纳为四点:一是具有独立的自主感知能力、自主判断能力、自主决策能力和行为执行能力;二是具有自我管理能力;三是一种人—机联合认知能力,体现人机交互程度;四是体现无人系统处理不同任务与环境的复杂性、动态性和不确定性的能力。
2、 自主性评价的军事需求
面对种类复杂、型号众多的无人机系统,科学构建无人机的自主性评价标准体系,提出适合无人机技术特征和作战使用特点的自主性评价方法,能够有效增强无人机系统研发的针对性和实用性,牵引无人机装备关键技术创新发展,提升装备体系化作战效能,具有重要的军事意义。
一是解决无人机成体系作战使用研究的急需。面向无人机装备战斗力生成,对无人机自主性关键技术、战技结合应用方法进行深入研究,解决自主性评价“量化什么、怎么量化、如何应用”等作战使用问题,为无人机系统装备预先研究、效能提升及作战使用提供技术支持,促使无人机系统自主性能力的生成和改进提升,为制定科学适用的装备作战使用手册和技术保障指南提供技术依据。
二是促进无人机装备关键技术创新发展的急需。无人机系统通用化的自主性量化评价方法,具有良好的可区分性、可计算性和通用性,可以避免无人机系统自主能力提法上和性能描述上的模糊性,有效增强无人机系统研发的针对性和有效性,指出自主能力的发展路线,进而牵引无人机装备关键技术的创新发展,促进无人机系统关键技术的工程实现和系统性能的逐步提升。
三是科学量化无人机系统自主能力的急需。美军现役及在研的无人机系统几乎都有相应的自主性等级。如何科学合理地定量描述和量化分级无人机系统的自主性,进而提升无人机系统装备体系化作战效能,为定量描述和量化分级任意级别无人机系统的自主能力提供有效手段,具有重要的军事意义和实用价值。
3、 国外自主性评价方法的研究进展
提高无人机的自主性是无人机发展的必然趋势。国外针对无人机系统自主能力评价已开展了许多卓有成效的研究工作,并有明确的应用目标。
3.1、研究进展及分析
纵观国外无人机自主性评价方法,比较典型且广泛应用的有Sheridan的自动装置等级(Levels of Automation,LOA)、自主控制水平等级(Autonomous Control Level,ACL)、无人系统自主性等级(Autonomy Levels for Unmanned Systems,ALFUS)、人机权限四级模型、自主系统参考框架。
(1)Sheridan的自动装置等级(LOA)
Sheridan的自动装置等级最早产生于1991年[9],2000年又进行了修改[10]。Sheridan通过研究人机交互所产生的决策及共同执行行为序列,将系统的自主性等级分成10级,范围从计算机不提供任何帮助,完全由人进行操作到计算机自己选择并执行任务,完全不依赖于人,如表1所示。自主性等级与人需要的交互成反比关系。若无人系统需要的交互越多,则其自主性等级就越低,当无人系统完全由外界控制时,就变成了遥控系统;反之,若无人系统需要的交互很少,就说明其自主性较强,愈加独立于外界的控制。
表1 Sheridan的自动装置等级
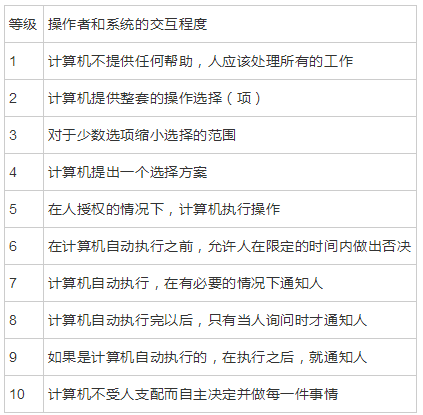
虽然这种方法并不是直接应用于无人机,但是无人机本身就是一种自动装置,而且计算机是无人机自主性能力产生的物质基础,因而这种方法对以后无人机自主性能力量化有一定的参考价值,但这种评价方法考虑的因素比较简单,对操作者模型如何建立并没有清晰的说明,往往只能反映系统的某个侧面或部分性能。
(2)自主控制水平等级(ACL)
为了深入研究无人机的自主作战(Autonomous Operation,AO)能力,美国空军研究实验室最早定义了10个自主性等级[11];美国国防部从发布第一版无人机路线图开始就提出了自主控制水平等级,2000年、2002年、2005年三版无人机路线图给出的自主水平等级趋势图均采取了同样的10个自主控制水平等级定义,衡量无人机自主程度[12,13,14]。以2005版无人机路线图为例,其中的自主控制水平等级发展趋势如图1所示,反映了无人机自主性的发展趋势:单机自主(遥控引导、实时故障诊断、故障自修复和飞行状态自适应、机上航路重规划)→多机自主(机群协同、群战术重规划、机群战术目标)→机群自主(分布式控制、机群战略目标、完全自主集群)[15]。
图1 2005版无人机路线图中的ACL发展趋势
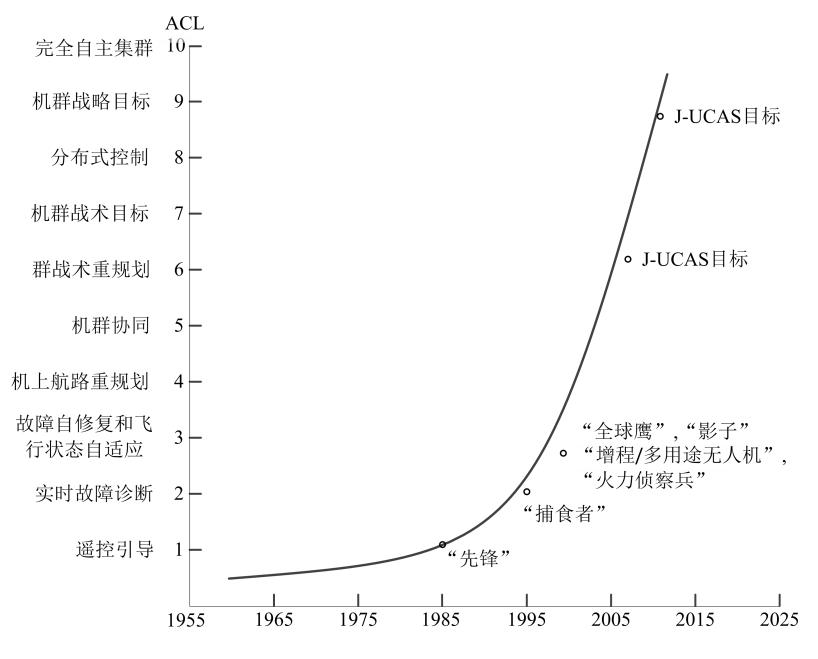
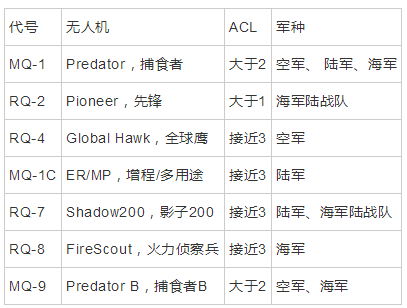
从各版无人机路线图来看,美军代号的无人机几乎都有相应的ACL,如表2所示[16]。但是ACL评估方法存在较大的局限性,一是各版路线图均未对ACL的各个等级进行详细说明,且1~6级划分偏细,而7~10级过于粗糙,等级划分离散,关联度低;二是ACL评估方法并非准确的定量评估,只能反映自主控制水平等级的模糊值和相对值,且代表性功能描述模糊、性能指标缺乏。
表2 美军无人机系统的ACL
美国空军研究实验室在无人机路线图10级ACL的基础上,结合观察、判断、决策、行动(Observe, Orient, Decide, Act)理论,提出了11级ACL,是对10级ACL的一种拓展[4,5,6]。基于OODA模型的ACL从无人机系统的任务决策过程出发,考察系统在决策各个环节上的自主程度,进而判定整个系统的自主能力。该评价方法从系统的角度刻画了任务决策的全过程,通过判定系统在观察、判断、决策和行动阶各自的等级,然后进行综合集成,进而获取整个系统的自主等级度量,能够从本质上反应系统的自主属性。然而,OODA模型没有给出具体的量化指标体系,难以定量评价无人机系统的自主能力。
(3)无人系统自主性等级(ALFUS)
美国国家标准和技术研究所智能系统部Huang等人进行了ALFUS框架研究,旨在提供一种无人系统自主能力的通用量化评估框架[17,18]。ALFUS主要从任务复杂度、环境复杂性、人机交互程度等三个方面来评判无人机系统的自主等级,如图2所示.将几个影响自主等级的因素分别描述在3个轴上,每条轴都有分别衡量3个方面的一套度量方法。任务复杂度通过子任务处理、决策、组织和协作的水平,知识和态势感知要求,规划和执行性能等方面衡量;环境复杂性通过障碍物尺寸/密度/运动、地势类型、市内通信特性、敌我识别能力等方面衡量;人机交互程度通过交互时间和频率、操作工作量、技能水平、机器人启动等方面衡量。
ALFUS框架按照任务复杂度、环境复杂性和人机交互程度定义了低、中、高3个层次的自主性,反映了自主性的发展趋势:单作动器/子功能→单功能→单无人系统→集群。无人系统自主水平,如图3所示,,3类影响要素逐渐添加和不断变化:人机交互程度(Human-Robot Interaction,HRI)从高水平逐渐递减到接近0,任务复杂度从低水平战术行为到最高复杂度的全任务逐渐增加,环境复杂性从简单环境到极端环境逐渐变化。
图2 ALFUS框架模型
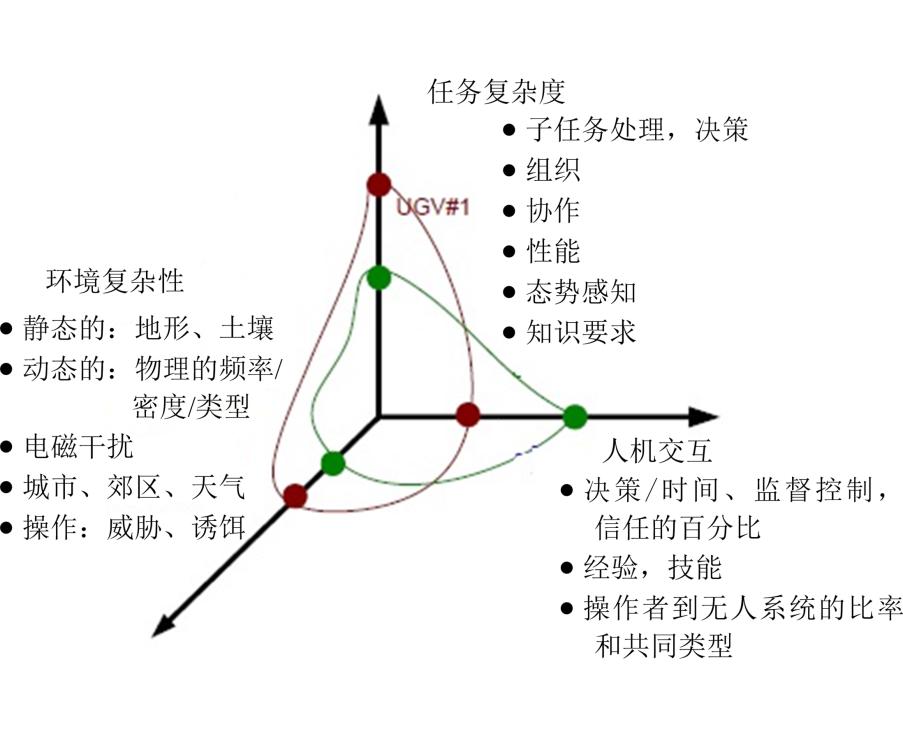
图3 无人系统自主水平简图
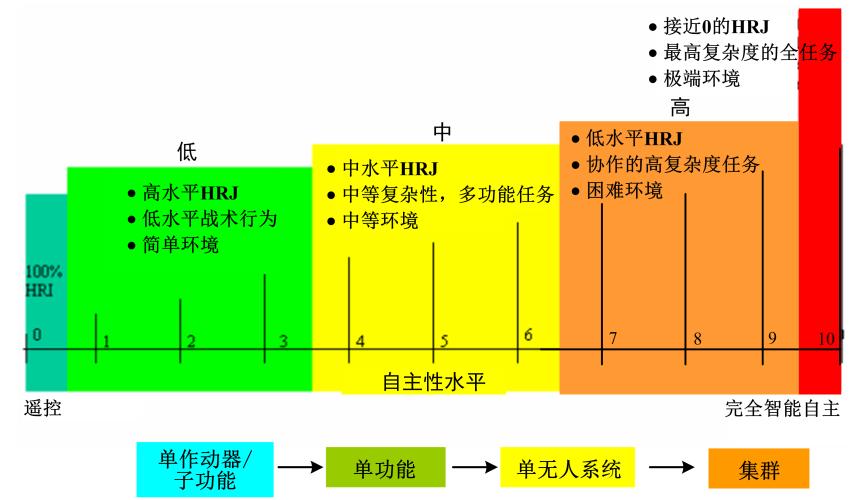
高自主性是指在宽广的任务和操作变化范围内,理解和适应环境,以最小的代价/危险完成所有分配的最复杂任务,并最大化取得价值/效益,完全不需要操作者介入。中自主性是指在有限的任务和操作变化范围内,有限理解和适应环境,以适当的代价/危险完成所有分配的任务,并取得一定的价值/效益,需要50%的操作者介入。低自主性是指在简单的环境中遥控完成简单的任务。
ALFUS框架模型可以有效反映无人系统的任务执行能力,但在实际应用中存在着一系列不可忽视的问题。首先,没有给出每个坐标轴上的因素如何进行衡量、权值如何进行分配,没有给出;其次,如何评估自主等级也是一个开放的问题,可供选择的方案很多,不同的方案会产生不同的评价结果。
(4)人机权限四级模型
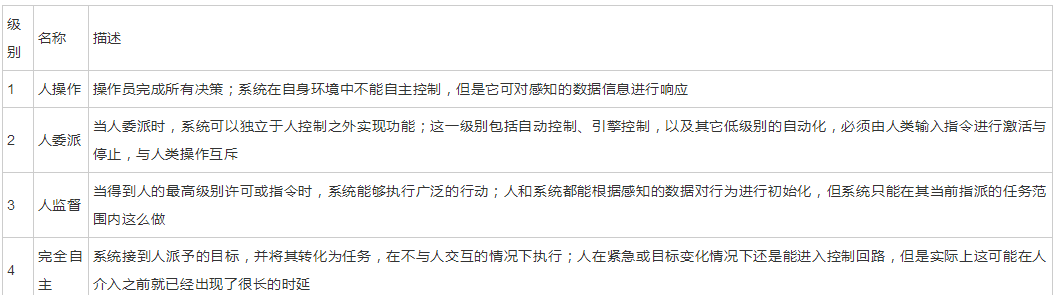
美国国防部在2007版、2009版无人系统路线图中回避了自主能力分级的话题,在2011版无人系统综合路线图中提出自主能力以人-机权限视角分为人操作、人委派、人监督、完全自主4个等级,如表3所示,人的权限越来越低,机器权限越来越高[19,20]。可以明显发现,自主性的4个等级与ACL完全不同,不存在继承性,2013版无人系统综合路线图仍然沿用了人机权限四级模型,但是提出需要对这种方法进行改进。此外,2011版路线图还提出了自主性路线图,描述了2011—2025年自主性在技术和能力两个方面的发展规划。
表3 人机权限四级模型
2012年7月美国国防科学委员会发布的《自主能力在国防部无人系统中的地位》报告认为,“世界上并不存在完全自主的无人系统,所有的自主无人系统都是人机联合的认知系统”[7],提出了一套从认知层次、任务时间轴、人机系统权衡空间3个视图定义的自主系统参考框架,并期望以此代替无人系统自主控制等级划分,强调自主难题的解决要更多关注指挥官、操作员和开发人员三者的协调问题,如图4所示。自主系统设计与评估框架表明自主能力是特定任务需求、作战环境、用户和平台等共同组成的均衡系统的一种功能,在特定情境不存在的条件下,不会产生效益。
图4 自主系统设计与评估框架
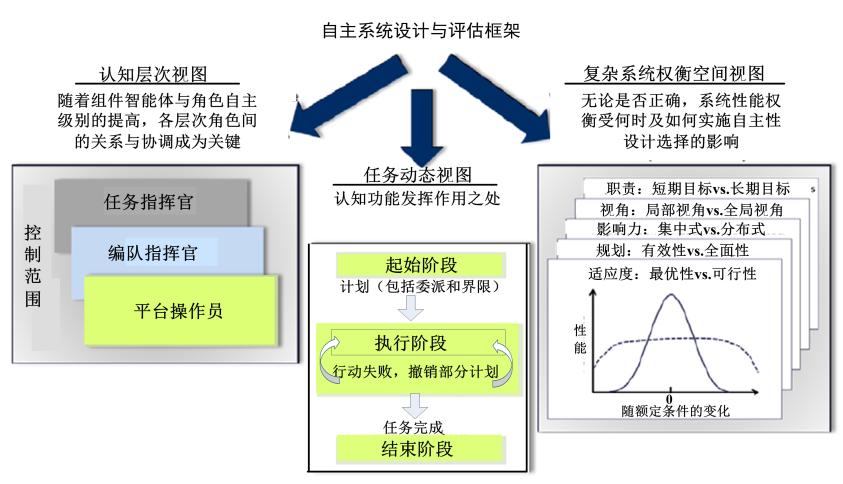
框架侧重于为实现特定能力所需的人-机认知功能与责任分配决策,包括认知层次视图、任务时间轴视图、人-机系统权衡空间视图3个视图,全面客观地反映角色如何使用系统、系统如何运行、人机如何分工问题对自主性的不同要求。其中,认知功能分配方式随着任务的不同阶段和不同认知层次的不同,认知层次视图表明不同角色对系统自主能力要求的不同;任务时间轴视图显示在执行基于环境复杂度和必要响应时间的任务期间,认知功能的分配可能会发生变化,提高自主等级有利于在任务期间按要求调整计划,反映了不同任务阶段对系统自主能力要求的不同;人-机系统权衡空间视图显示在可视自主能力设计时必须进行高级人机系统权衡,包括适应度、规划、影响力、视角、职责等多维度评价自主能力,表明好的自主能力要权衡、适中。
3.2、 对比分析及结论
对比分析国外研究进展,得出如下结论。
1) LOA方法将无人机作为自动装置,ACL方法将无人机作为无人平台,ALFUS框架方法、人机权限四级模型、自主系统参考框架将无人机作为无人系统,分别评价无人机自主性,反映了无人机自主性评价对象的发展趋势:自动装置→无人机平台→单无人机系统→集群无人机系统。
2) LOA和ACL方法从人机主客体关系角度,ALFUS框架方法从人机交互角度,人机权限四级模型从人机权限分配角度,自主系统参考框架从人机联合认知的功能与责任分配角度,分别评价无人机自主性,反映了无人机自主性评价中人机关系的发展趋势:主客体关系→人机交互→人机权限分配→人机联合认知。
3) 无人机自主性评价与作战任务和战场环境密切相关,具有任务关联性和环境依赖性特点,不同作战任务、不同战场环境对无人机系统的自主性要求不同。
4) 5种无人机自主性评价方法,其评价指标均侧重于无人机的硬件水平,实际上随着人工智能和高性能计算技术的发展,软件水平对无人机自主性能力的影响更大。考虑无人机系统机-站-链-网一体化特点,无人机自主性评价要注重研究软件水平对评价结果的影响。
5)现有国外评价方法本质上仍是以ACL或ALFUS三因素评价模型为基础的拓展研究,主要适用于单个无人机平台执行任务时的自主性评价。面向不同战场环境和作战任务,对任意级别的无人机系统实现自主性定量描述和量化评价,存在较大差距。
4、 自主性评价的发展趋势及分析
尽管国外无人机自主性评价研究已取得了一些进展,但在量化评价与工程应用方面仍然存在较大差距。针对面向不同战场环境和作战任务的任意级别无人机系统,实现自主性定量描述和量化评价,需要进一步深入研究。考虑人工智能和高性能计算技术的发展,分析无人机系统的技术特征和作战使用特点,笔者认为无人机自主性评价将呈现出如下发展趋势。
1) 基于认知控制行为的自主性评价
“所有的自主无人系统都是人机联合认知系统”,无人机系统的自主性本质上是由无人机代替有人驾驶飞机驾驶员完成作战任务的智能行为能力,而人工智能和高性能计算技术的进步为自主性智能行为的发展注入了活力,如何有效结合人工智能技术,通过类比人类的认知控制行为来评价无人机系统的自主行为和决策机制,对于提升无人机系统自主性具有重要意义。
2) 与作战任务相融合的自主性量化评价
国外现有自主性评价方法本质上还是采用不同评价标准给出的一种定性描述方法,缺乏具体的定量度量指标和科学的理论依据,对自主性分级过程和评价结果没有量化,具有较大的主观判断。由于没有紧密融合作战任务,而不同作战任务对无人机系统的自主性要求不同。因此,面向不同战场环境和作战任务,建立一套具有良好可区分性和可计算性的自主性定量描述和量化评估方法,是无人机系统自主性评价向工程实用化方向发展的必然趋势。
3) 自主性定量评估的通用性模型
国外现有自主性评价方法以分等级评估为主,针对某类或某型无人机描述较为清晰,易于操作和比较,但缺乏通用性,对单机自主性能力的划分和评估具有一定的参考应用价值。但对于多机甚至机群的自主性能力划分和评估较为粗略,只能大致反映自主水平发展的趋势。加之无人机种类繁多,随着技术进步和型号研制的推进,建立适合任意级别无人机系统自主性量化评估的通用性模型势在必行。
5、 结束语
针对近年来国外无人机自主性评价方法的研究进展进行了综述。剖析了无人机自主性内涵的演变,将其技术内涵归纳为具有自主OODA能力、自我管理能力等特点;从作战使用、技术发展、科学量化3个方面分析了自主性评价的军事需求;总结了无人机自主性评价方法的国外研究进展,从评价对象、人机关系等方面得出了对比分析结论;指出了无人机自主性评价的发展趋势,对科学构建无人机自主性评价标准体系,实现自主性定量描述和量化评价,具有一定的借鉴价值。
参考文献:
[1] 沈林成,牛轶峰.无人机系统自主控制技术发展分析.国外空天无人飞行装备发展动态,2013(9)
[2] 马衍明.自主性:一个概念的哲学考察.长沙理工大学学报(社会科学版),2009,24 (2)
[3] Defense OOTS.Unmanned system roadmap 2007-2032.WashingtonDC:Defense OOTS,2007.
[4] Clough B T.Metrics, Schmetrics! How do you track a UAV’s autonomy? AIAA 1st Conference on Unmanned Air Systems,Portsmouth,2002
[5] Clough B T.Metrics, Schmetrics! How the heck do you determine a UAV’s autonomy anyway. The Performance Metrics for Intelligent Systems Workshop,Gaithersburg,2002
[6] Clough B T.Relating autonomy to a task-can it be done? AIAA 1st Technical Conference and Workshop on Unmanned Aerospace Vehicles,Portsmouth,2002
[7] Defense Science Board.The role of autonomy in DoD systems.Washington DC:Department of Defense Defense Science Board,2012
[8] Defense Science Board.Summer study on autonomy. Washington DC:Department of Defense Defense Science Board,2016
[9] Sheridan T B. Automation,authority and angst revisited in human factors society.California: Human Factors & Ergonomics Society Press,1991
[10] Parasoraman R,Sheridan T B,Wickens C D . A model for types and levels of human interaction with automation. IEEE Transactions on Systems Man and Cybernetics Part A,2000,30
[11] 高劲松,丁全心,邹庆元.国外无人机自主能力量化评估方法初步分析.第一届中国导航、制导与控制学术会议,2007
[12] Defense O O T S.Unmanned aerial vehicles roadmap 2000-2025.Washington DC:Defense O O T S,2001
[13] Defense O O T S.Unmanned aerial vehicles roadmap 2002-2027.Washington DC:Defense O O T S,2002
[14] Defense O O T S.Unmanned aircraft system roadmap 2005-2030.Washington DC:Defense O O T S,2005
[15] 陈宗基,魏金钟,王英勋,等.无人机自主控制等级及其系统结构研究.航空学报,2011,33
[16] 沈林成,徐昕,朱华勇,等.移动机器人自主控制理论与技术.北京:科学出版社,2011
[17] Huang H,Pavek K,Novak B,Albus J,et al. A framework for autonomy levels for unmanned systems(ALFUS).The AUVSI's Unmanned Systems North America,Baltimore,2005
[18] Huang H,Pavek K,Albus J,et al.Autonomy levels for unmanned systems (ALFUS) framework:an update.SPIE Defense and Security Symposium, Florida,2005
[19] Defense O O T S.Unmanned system integrated roadmap FY 2011-2036.Washington DC:Defense O O T S,2011
[20] Defense O O T S.Unmanned system integrated roadmap FY2013-2038.Washington DC:Defense O O T S,2013
[21] Zhang T,Li Q,Zhang C,et al.Current trends in the development of intelligent unmanned autonomous systems.Frontiers of Information Technology & Electronic Engineering,2017, 18(1)

1概述雾给交通带来的损失是巨大的。有雾飞机无法起飞和降落。海上浓雾会使船只触礁失事;高速公路上汽车追尾事件的罪魁灾首常常就是雾。现有消雾手段主要采用飞机播撒系统和地面作业系统,消雾费用成本高。飞机播撒消雾很难达到近地面;地面消雾系统建设成...
在当前形势下,电力企业的体制改革已取得了一定的成效,供电服务范围进一步扩大,输电线路的分布也越来越广。由于各地区的自然环境具有一定的差异性,因此,采用人工方式对输电线路进行日常巡检已远远达不到要求。而采用无人机巡检可以在第一时间查明故障位...
前言无人机具有分辨率高的特点,可以有效弥补卫星遥感的不足和解决卫星遥感应急不及时的问题,对无人机重要作用的发挥具有十分重要的意义。随着我国社会经济迅猛发展,对电力系统运行的稳定性和安全性要求更高,将无人机应用于我国电力系统中,可以有效提高...

如今,随着高新技术的发展,有效的拓宽了无人机的应用范围,而且相关性能得到有效提升,为推动不同行业、不同领域的发展奠定了良好的基础。...

随着经济社会的不断进步,社会建设步伐的逐渐加快,极大推动测绘工程测量工作的稳步发展,与此同时,对于测量结果的质量、测量工作的效率要求也越来越高。...

四旋翼无人机是一种典型的多旋翼无人机,结构简单,体积较小,飞行平稳[1],广泛应用于影视航拍、电力巡线、航空测绘、农林植保等领域,具有极其重要的研究价值。本文以四旋翼无人机为例,研究多旋翼无人机的组装和调试。...

在众多旋翼无人机机型中,四旋翼无人机由于造价低廉与飞行性能稳定,在民用领域应用最多。从实际结构来看,其机身是由四个机臂组成,电机与旋翼都对称地安装于相应机臂的前端位置。...

无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,在水质监测的过程中[1,2],需要对水进行采样,由于一些水面较广,为了便于工作人员采集河面、湖面或是其他水源的水样,通常会利用无人机进行水样的采集[3]。...