给排水工程论文

摘要:水是人类赖以生存的物质,生活供水是由供水系统实现的。文章以变频恒压供水系统来控制供水方式,对一个小区的用水情况进行控制分析。学习供水系统的特性和变频控制的一般原理,研究其节能方面的作用,得出本系统对象每个环节的近似数学模型。在恒压供水的前提下,文章研究的是最佳的控制策略,实现对小区用水的合理管理和高效运行,从而达到节约资源的目的。具体内容为通过对供水系统的三种控制策略进行比较和分析,结合小区的供水系统的供水情况生成Simulink的结构图,把系统的数学模型转换为对象的传递函数,并设计相应的模糊控制器。总结出最适合该小区供水系统的控制策略,并阐明其最佳的原因(主要由于水压的非线性变化)。
关键词:变频调速; 恒压供水; 模糊控制; PID; 模糊PID;
在变频调速技术和计算机技术飞速崛起和持续改善的今天,变频技术在许多生活电器上得到了普及和应用,是提高控制系统能效的一种重要措施。将此项技术运用于小区的供水系统,对节约水资源、加强集中管理控制和改善系统的稳定性都具有重要意义,与社会所提倡的环保理念相呼应。因此本研究以此为出发点,对基于模糊PID控制的变频恒压供水系统的算法展开研究,为完善供水系统的管理、增强工作可靠性、降低人工成本、减少超调和振荡、提高系统运行管理的信息化水平提供必要的支撑条件,使供水系统调节更加迅速、水压趋于稳定、操作方便简洁、节能效果突出,且具有反应迅速的故障报警功能和开放的数据传输。
1 变频恒压供水的原理
1.1 供水系统的基本特性
在供水系统中,若阀门的开度恒定,而水泵的转动速度为某一个值时,扬程H和流量Q所形成的函数H=f(Q)就是供水系统的基本特性:流量Q变大,扬程H将变小。若水泵转速也恒定,则用户的用水情况能够大部分的决定流量。因此,扬程H和用水流量Qu所形成的函数就称为扬程特性。当水泵的转动速度恒定而阀门的打开程度为某一个数值时,扬程H和流量Q所形成的函数H=f(Qu)则称为管阻特性。特性曲线反应出水泵的水位被水泵的能量降低的趋势、水压的差值以及水在管道中遭遇阻力的抖动规则。
根据前面可得出,当阀门的开度不变时,扬程H变大,流量Q将随之变大,因为当阀门开度变化时,供水系统向小区的住民供水的性能同步发生变化。扬程H和流量Qs一起形成函数H=f(Qs)。
1.2 变频调速的原理
异步电动机转速n的表达式为:

1.3 节能原理
节能原理:采用转速控制比阀门控制节省的能量为四边形(H1,D,F,H2)。这是由于采用阀门控制时,电机转动的速度不变,导致消耗的功率也不变。而转速控制时,如果转速降低,则它消耗的功率也会随之减少,固能达到节能的效果。
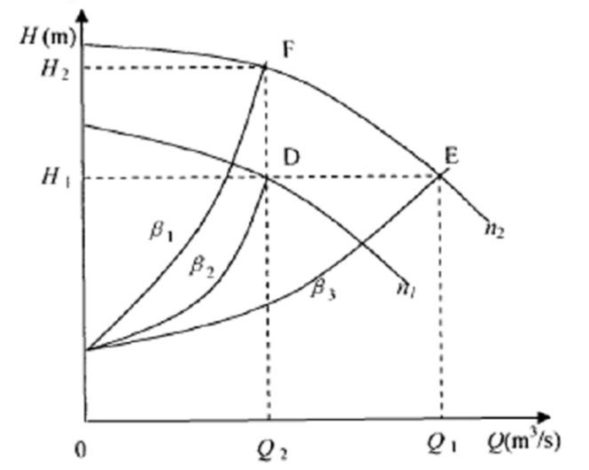
图1 水泵工作&变速调节曲线
2 控制算法的仿真研究
2.1 数学模型的建立
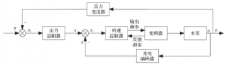
对系统建立数学模型,就要获得每个部分的传递函数,在变频恒压供水系统中,主要包括变频器、控制器、泵组、传感器等部分。
其中,变频器选用恒压频比的方法,其数学模型相当于一个比例环节;异步电动机采用近似省去电磁惯性,其数学模型近似相当于一个一阶惯性环节;在零压过程中,水泵传送水,压力保持为零,此时管网的数学模型在本文相当于一个纯滞后环节;传感器的频宽被大多数系统所满足,固其数学模型也可等效为一个比例环节。综合以上各部分的传递函数,可以大致得出本文小区供水系统的数学模型,它包括一个比例部分,一个纯滞后部分和一阶惯性部分。经过多次测量和查阅资料,采用的数学模型为:

2.2 模糊控制器结构设计与仿真
模糊控制的控制器设计,其输入是压力信号和设定压力的差值和差值的变化量,输出U是调整后的压力值,达到调整的效果。其中,输入水压偏差以及它的变化量和输出水压控制量的基本论域都为[-6,6]。模糊控制经过专家和资深的实践工作人员制作出对应的规则,用模糊控制这种策略制定供水系统的模糊规则。
2.3 模糊PID控制器结构设计与仿真
由之前对基于模糊的PID控制的描述,我们对其原理已经有了清楚的认识。而其控制器的设计也在上章有所描述。我们采用simulink中的FIS修改器来设定它的控制器,确定水压输入偏差和偏差变化量与水压输出控制量的隶属函数,由于最后是和PLC联系,采用三角函数。其中它们的语言变量和基本论域可以参照上一章,在simulink中的fuzzy编辑器中的设定。在Simulink中可以经过Viewer来查看模糊控制器的规则,这样看来更加形象易懂。
2.4 控制策略仿真比较与分析
常规PID控制因为比例项的存在,可以做到调节速度快;因为积分项的存在,可以实现使误差降为零的反馈调整;因为微分项的存在,可以实现调节速度回升,但是对非线性的变化量,比如水压的无周期变化等,无法达到很好的控制效果。
模糊自适应PID控制,由于模糊技术而降低了超调量,又可以接受非线性的输入变化,通过PID控制的快速响应,模糊PID控制上升时间短,可以实现在线自整定调整,控制精度很高,因此它是这次小区供水研究的最佳控制策略。
3 结语
本研究通过完善小区的供水系统、对生活用水进行合理安排,来实现节约水资源的目的。重点研究了系统的算法,分别对PID和模糊算法进行研究比较,得出了一些特征:PID控制主要在稳态性能方向占有优势,在动态特性方面则略有不足;而使用自然语言的模糊控制算法,在动态响应方面非常突出,但是稳态性是它的难题。以数学模型是否清晰、精确来检验控制系统:当它清晰易建立时,PID控制能够取得优良的控制品;但清晰度很低时,难以建模,PID控制就会乱成一团。而模糊控制正好能拯救这个难题。以自我适应能力来检验控制系统:PID控制对于像本文所研究的对象无计可施,只能依靠拥有优良鲁棒性的模糊控制来修正。三者的仿真比较得出:PID控制下的曲线响应速度很快,但基于模糊的PID控制的上升时间较快;模糊控制的曲线无法达到误差恒等于零,而基于模糊的PID与常规的PID控制能够达成;模糊PID控制的超调量也较低,并且在水压差值大的时候迅速响应,在差值小的时候能够放慢速度。因此,基于模糊的PID控制是供水系统最适合的控制手段。
此外,本文对供水系统控制算法的研究仍存在一些缺陷,主要就是由于模糊的PID控制算法是来自模糊思想,而它又以模糊规则为基础,如果人们对一些系统的认知和实践不够,就无法得出能够精确调整的规则,会导致系统变得不稳定。
参考文献
[1]齐继阳,孟洋,李金燕,王凌云.模糊PID在恒压供水控制系统中的应用[J].自动化与仪表,2015(3):44-47.
[2]唐莎.基于模糊PID控制的变频调速恒压供水系统[J].机电工程技术,2015(1):98-100.
[3]吴啸雄,施纪伟.基于模糊PID控制的变频调速恒压供水控制系统设计研究[J].硅谷,2014(13):62-63.
[4]任丹.基于模糊PID控制算法的恒压供水系统研究[D].大庆:东北石油大学,2014.
[5]秦小玉,蔡郡倬,高祥.基于神经网络PID控制的变频恒压供水系统[J].自动化与仪表,2015(3):48-52.
[6] 孙小智.PLC控制的变频恒压供水系统[J].电子世界,2014(21):93.
文章简单介绍了PLC控制技术,并提供了一种新型变频恒压供水的系统方案;再结合本市现有供水系统结构,对PLC 变频恒压供水系统的设计进行了探究,设计后的系统具有低成本、高稳定性、宽流量范围、节能等优点。...

本文阐述了医院变频器恒压供水系统的维护方法,同时分析了变频器恒压供水系统在安全管理上的具体措施,扎实做好医院变频器恒压供水系统的安全管理工作,可确保医院变频器恒压供水系统的可靠安全运行。...
分析基于PLC控制的变频器恒压变频供水系统在压力不足时增加水泵的过程和用水量下降时减少水泵的工作过程, 也对该系统使用过程中出现的工频与变频切换跳闸、系统震荡及机械故障等进行总结分析, 并给出相应的处理对策。...

跟随着变频恒压供水技术的不断推广应用,对于保证轧钢厂供水系统稳定性有了明显的提高,另外,该项技术也符合现代可持续发展的主体,在很大程度上提升了水资源的利用率。...

分析基于PLC控制的恒压供水系统设计具体内容,有利于了解PLC控制系统下恒压供水系统各结构的特点,从设计上实现系统的优化和改良。...

它充分运用变频器存在的多种职能,合理设置变频调速恒压供水设备,在减少成本、确保产品的质量等方面都极具意义。...
本文首先从4个方面介绍了恒压供水系统中变频调速应用的优势,之后在对变频调速恒压供水系统结构进行介绍的基础上,阐述了恒压供水系统中变频调速的控制原理。...

随着电气技术发展,变频调速技术运用广泛,如今变频器一般都内置PID调节器,这节省了PLC存储容量和PID的编程,使PLC仅采用一个I/O模块即可控制变频器多段速调节,将自带PID调节器的变频器应用于供给水系统中,有利于减短调试的时间,采用PLC指针式编程简化程...