流体力学论文第五篇:气固两相流静电测速系统原理与构成分析
摘要:介绍气固两相流中颗粒荷电产生的机理,阐述了静电传感器测量原理,并介绍了多种接触式和非接触式静电传感器,重点叙述了静电传感器测速的基本原理和整套气固两相流速度测量系统的组成部分。
关键词:气固两相流; 电荷; 静电传感器; 速度测量;
1 概述
在众多工业生成过程中,广泛存在气固两相流这一特殊的流动状态,而对其参数的测量存在着众多难点,气固两相流静电测速技术是近年来广受关注和发展迅速的一种气固两相流速度的测量方法。
2 气固两相流颗粒荷电机理
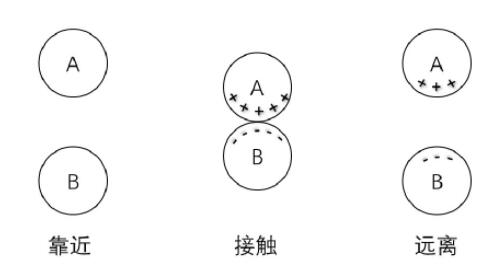
固体接触起电发现的时间很早,但是,对固体接触起电的机理认知却是一个漫长的过程。不同物体的功函数往往不同,这就导致两个物体在接触距离达到原子级别时(25埃),接触的两个表面之间存着这接触电位差,这就给电荷转移提供的原始动力,在接触电位差的驱动下,电荷开始移动,负电荷向功函数大的物体表面移动,正电荷向功函数小的物体表明移动,直至电荷转移形成的反响电位差与接触电位差等值反向,从而达到一种平衡状态,此过程十分所需时间极短,在接触的瞬间基本完成,此时接触表面称为电偶层,而电偶层的正负电荷数量相当,整体对外表现为不带电。而在分离之后,功函数大的物体携带一部分负电荷,功函数小的物体则携带一部分的正电荷,两者对外表现带电,此过程如图所示。
物体A和物体B接触起电过程
若将接触时物体B所携带的电荷量定义为Q0,远离后物体B所携带的电荷量定义Q,则两者之间如公式(1)所示:
式(1)中,f成为逸散系数,其取值范围为0<f<1。若两者分离速度足够快,则f越接近于1,也就是说分离后的所携带的电荷量则越接近于分离前电偶层上所携带的电荷量;反之,分离速度很慢,两者分离后所携带的电荷量也越小。
3 静电传感器测量原理
3.1 静电感应效应
气固两相流中固体颗粒所携带的电荷将会产生静电场,那当带电体靠近不带电的导体时,导体内部电荷将在外电场的作用下重新分布,异种电荷分布在靠近带电体的导体表面,同种电荷分布在远离带电体的导体表面,从而产生静电感应效应。
3.2 静电传感器的种类
基于静电感应现象,相关科研人员已经开发了多种不同结构的静电传感器用于监测气固两相流中的流动参数,整体上可分为接触式静电传感器和非接触式静电传感器[3]。
无论是哪种结构的静电传感器,都要求静电传感器内部的感应电极具有良好的导电性。
4 静电测速的基本原理与系统构成
4.1 互相关测速原理
在同一管道上相距为L两个截面处分别安装结构完全相同的感应电极,当L较小时,可认为被测流体在上下游感应电极之间没有发生变化,即上下游感应电极所捕获的随机流动噪声信号也是相同的,只是两路信号存在一定的时间差τ[4],即
式中τ就是流体从上游感应电极流到下游感应电极的时间,称为渡越时间。
而流动信号x(t)和y(t)的互相关函数Rxy(τ):
则Rxy(τ)函数的峰值对应的时间τ0就是两路流动噪声信号之间的渡越时间,由此即可算出相关速度VC:
通过对相关速度VC的校正即可获得流动速度V:
4.2 静电测速的系统构成
气固两相流静电测速系统由双(多)感应电极构成的静电传感器、信号调理电路、数据采集、相关分析的软件组成。
4.2.1 静电传感器
气固两相流中固体颗粒在管道内流动时,颗粒与颗粒或壁面之间将发生碰撞,导致颗粒表面将携带一定电荷量,形成带电颗粒,在管道壁面处安装感应电极对流动噪声信号进行捕捉。各个带电颗粒在感应电极上引起的静电感应现象相互叠加共同构成了感应电极的输出信号。而不同结构的传感器所捕获的流动噪声信号也不经相同,具体体现在输出信号幅值不同,信号带宽不同,这就要求如何优化静电传感器的设计以满足信号拾取精度高,动态响应快,空间灵敏度特性好的静电传感器性能需求。
同时,因采取互相关原理用于计算颗粒的速度值,所选择使用静电传感器为双(多)感应电极构成的静电传感器,而感应电极间距也因通过实验不断调整,以保证可获得较为准确的流速值。
4.2.2 信号调理电路
双感应电极的静电传感器输出的两路信号具有低功率和高阻抗的特点,一般采集设备难以采集,需经过阻抗匹配和信号放大等调节电路处理,将其转换为较高功率和低阻抗的信号。信号调理电路主要包括信号缓冲级和放大级,同时信号调理电荷还应具备低噪声,低漂移、抗干扰能力强等设计要求。因此需要通过不断的分析与验证,找到合适的调理电路各参数指标。
4.2.3 数据采集
调理电路输出的电压信号仍为连续变换的模拟信号,并不能直接用于后续信号处理,需要通过数据采集卡,完成模拟信号转换为数字信号。而数据采集的采样频率一方面应满足采样定律,保证采集过后的信号不失真,另一方面采样过后渡越时间将转换为离散时间点对应的值。综上所说,应充分考虑各影响因素,合理选择数据采集的采样频率。
4.2.4 互相关运算
数据采集卡输出的数字信号进行数字滤波,截取适当频率范围用于进行互相关运算,通过才采样率和互相关函数峰值对应索引,即可得到两路流动噪音信号的渡越时间,结合静电传感器上下游感应电极的间距,并加以修正,即可得到气固两相流中固体颗粒的速度。而目前主要互相关算法可以分为基于时域的互相关、基于频域的互相关、归一化互相关、差动自相关、极性互相关、梯度互相关、广义互相关等。具体实现需编写特定程序,用以分析几种离散信号互相关的算法的优劣,目的在于选择合适的算法实现信号的互相关运算,得到稳定而准确的气固两相流固相颗粒的速度信息。
5 结论
气固两相流静电测速系统有结构简单、成本低廉、计算结果不受流质干扰和可应用于恶劣工业环境等特点,应用前景较为广泛。但由于气固两相流的流动特性十分复杂,应用环境多变,这就给整套系统的设计提出来众多要求,尤其是静电传感器的设计及优化,仍需进行大量的研究和实验验证,以满足实际工业生产过程对气固两相流流动噪声信号的精准感知。
参考文献
[1]孙延林.电子工业静电防护指南[M].北京:电子工业出版社,2006.
[2]郝芸.传感器原理与应用[M].北京:电子工业出版社,2002.
[3]许传龙.气固两相流颗粒荷电及流动参数检测方法研究[D].南京:东南大学,2006.
[4]Kosiwczuk W, Cessou A, M. Trinité, et al. Simultaneous velocity field measurements in two-phase flows for turbulent mixing of sprays by means of two-phase PIV[J].Experiments in Fluids, 2005,39(5):895-908.
点击查看>>流体力学论文(精选范文8篇)其他文章