力学论文

摘 要: 为满足高速风洞试验现场日益复杂的采集需求,研制了一种高速风洞微型测量系统,由电气接口模块、增益控制模块、低通滤波模块、扫描采集模块、主控模块、LAN总线接口模块组成,实现了电压信号放大、低通滤波、模数转换、数据处理与分析等功能;静态校准结果线性度及误差限小于0.03%,与风洞常规测量系统相当,将该系统成功应用于2.4米跨声速风洞标模测力试验,开展了与常规测量系统的对比试验以及测量精度试验,马赫数0.40、0.78、0.85对应的CLα差量分别为0.000 9、0.000 4和0.002 0,差异在2.0%以内,CmCL差量分别为0.003 9、0.000 3和0.001 1,对应焦点位置变化均小于0.5%气动弦长,重复性精度指标绝大部分均在国军标合格指标以内,部分达到先进指标;结果表明微型测量系统精度和稳定性满足高速风洞试验要求。
关键词: 高速风洞; 微型测量系统; 测力试验; 误差限; 气动系数;
Abstract: In order to meet the increasingly complex requirements of high speed wind tunnel test,a micro measurement system for high speed wind tunnel is developed,which composed of electrical interface module,gain control module,low-pass filter module,scan acquisition module,master control module and LAN bus interface module,realizing voltage signal amplification,low-pass filter,analog digital conversion and data processing and analysis.The linearity and error limit of static calibration results are less than0.03%,which are equivalent to the conventional wind tunnel measurement system.The system was successfully applied to the standard model's force test in 2.4 meter transonic wind tunnel,and the comparison test and measurement accuracy test were carried out.The differences of CLαbetween micro measurement system and conventional measurement system are 0.000 9、0.000 4 and 0.0020 at Mach number 0.40,0.78 and 0.85,which is within 2.0%.The differences of CmCL are 0.003 9、0.000 3 and 0.001 1,and the corresponding change of focus position is less than 0.5% of the aerodynamic chord length.Most of the repeatability precision indexes are within the qualified indexes of national military standards,some of them reach advanced indexes.The results showed that the precision and stability of the micro measurement system meet the high speed wind tunnel test requirements.
Keyword: high speed wind tunnel; micro measurement system; force test; margin of error; aerodynamic coefficient;
0 、引言
风洞测量系统由信号调理及数采设备组成,包括滤波、放大、模数转换等功能,用于采集压力、温度、力和力矩等类型的传感器信号[1]。由于风洞内部环境复杂,风洞测量系统一般安装于风洞外部,模型天平及分布于风洞各部段的各类传感器需要通过双绞屏蔽线将信号输入到测量系统。对于传感器测点较为分散的大型风洞,信号长距离传输会导致信号衰减,同时由于风洞现场大功率电机驱动设备较多,如天平输出的小信号传输过程中易受空间电磁干扰,这些均会对测量精度产生影响。对于无法布置信号线的应用场合,比如压气机及旋转叶栅中的旋转试验件、直升机旋翼上的传感器信号采集,现有风洞测量系统也不再适用。

随着电子技术的高速发展,数字化、小型化的测量设备不断涌现[2,3],为解决传统风洞测量系统在应用中存在的问题提供了技术手段。国内外研究机构针对不同试验需求开展了相关研究工作,美国NASA兰利中心将微型测量技术应用于TDT跨声速风洞模型测力试验、模型姿态角、模型表面压力与温度测量[4]。美国国家航空航天局NASA实施了风洞测力能力战略发展规划[5],为进一步提升NASA风洞测力试验能力,满足未来航空航天飞行器型号研制需要,开始发展数字天平与无线天平。俄罗斯中央流体动力学研究院(TsAGI)利用微型测量技术,研发了MKTM系列微型测量系统,实现应变天平、角度、温度的测量,外形尺寸为60mm×34.5mm×17mm,采用RS485接口传输数据,电阻应变计信号测量精度可以达到0.01%。中国空气动力研究与发展中心应用无线测量模块实现了某风洞动压的测量[6],测量结果与常规测量系统吻合较好,静态校准表面压力测量精度优于0.05%。中国空气动力研究与发展中心将微型数据采集设备安装于风洞流校装置[7],缩短了测压管路,实现了五孔探针压力的测量,提高了流场校测效率。上述国内研究成果应用于低速风洞,且性能指标无法满足高速风洞测力试验需求。针对集中式测量系统在高速风洞试验中存在的问题,本文研制了一种微型测量系统,通过静态校准验证了系统性能指标,并开展了风洞测力试验,对系统动态性能进行了检验。
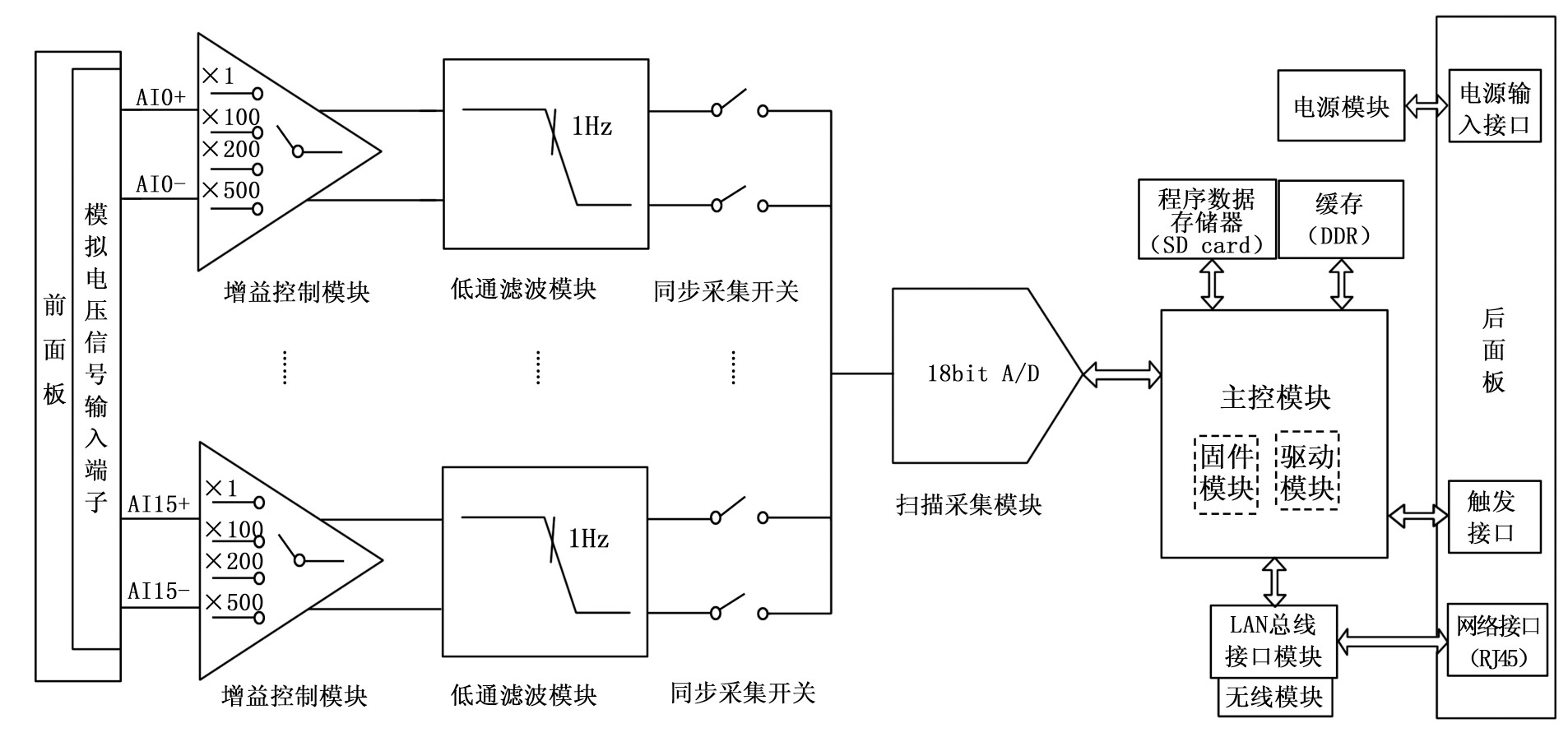
图1 微型测量系统框图
1 、总体方案
微型测量系统基于LAN总线,包括常规测量系统的放大、滤波及模数转换功能,关键性能指标与风洞常规测量系统相当,具备数据在线处理与分析能力,兼容无线数据传输协议,具备一定防护和防震等级。微型测量系统可通过以太网组网,基于IEEE 1588协议实现多微型测量系统的同步采集。系统采用微型化及防震设计,满足特殊安装环境需求,可安装于模型支撑机构或模型内部用于天平、温度、压力传感器、倾角传感器等信号采集,也可安装于无法走线的旋转试验件及其它需要考虑高冲击及强震动的场合。可加装无线传输模块,完成本地采集及预处理后,通过网络方式实现数据向上位机传输。
图1为微型测量系统结构框图,主要由电气接口模块、增益控制模块、低通滤波模块、扫描采集模块、主控模块、LAN总线接口模块组成。微型测量系统工作原理:输入信号通过模拟电压信号输入端子接入,并通过增益控制模块实现信号的放大,经过放大的模拟信号中包含一定的噪声和混叠信号;经过低通滤波模块,滤除模拟信号的噪声和混叠信号;在同步采集开关的作用下,经过滤波处理的模拟信号轮询进入A/D中进行采集,完成模/数转换;之后数字信号进入到主控模块中,主控模块中的固件模块对信号进行修正处理,并进行缓存和存储;当接收到上位机的数据读取命令时,将缓存的数据上传。
2 、微型测量系统设计
微型测量系统实物如图2所示。系统防护等级为IP54,电路板通过螺栓固定并垫有减震胶垫,尺寸为167mm×88mm×32mm(长×宽×高),输入信号范围为-10~10V。下面根据信号及数据流向,对系统各模块进行介绍。
图2 微型测量系统实物图

2.1、 电气接口模块
电气接口模块包括前面板和后面板。前面板选用VH-DCI-68端子,提供16路模拟电压信号输入通道,具备电流过载保护和电压过载保护双重保护功能,支持共地差分/单端信号、浮地差分信号接入;后面板包括12V直流电源输入接口,百兆以太网口,外部触发输入接口。
2.2、 增益控制模块
提供4档高共模抑制比程控放大器,实现电压输入信号的增益放大,每通道增益可独立设置,增益分别为:×1,×100,×200,×500,满足不同量级信号的放大需求。
2.3、 低通滤波模块
每个模拟输入通道单独设计了独立的有源二阶巴特沃斯低通滤波器,用于滤除高频噪声及混叠信号。巴特沃斯滤波器最大的特点是通频带内的频率响应曲线最平坦,没有起伏,而在阻频带下降速率较缓慢。根据风洞稳态试验信号特点,常规测量系统低通滤波截止频率一般设置为1Hz,为降低低通滤波模块电路复杂度,减少电路板尺寸,只设计了截止频率为1Hz的二阶巴特沃斯低通滤波器。
2.4 、扫描采集模块
选用高采样率的单A/D实现多通道采集功能,多路模拟信号通过与采集同步的开关切换依次轮询进入A/D中进行采集。扫描采集设计中,A/D的转换时机与模拟开关的切换时机要十分严格地进行同步,其核心控制通过主控逻辑模块的扫描表完成。扫描表用于存放模拟通道号,实际采集时通道的接入通过通道号选择,通道号存放顺序可灵活设置。模数转换模块选用的是18bit的SAR型A/D模块,单通道采样速率最高250kS/s,16通道采样共享采样率最高1.5MS/s。
2.5 、主控模块
包括固件模块和驱动模块,采用ZYNQ系列器件作为主控芯片,该芯片包括FPGA和ARM两部分,FPGA为前端模拟电路与后端数字接口之间的桥梁,ARM处理器支持多种标准通信协议,具备计算能力。主控芯片支持多种总线接口以及多种存储器接口,具有较强的可扩展能力,同时具有低功耗和体积小的优点。
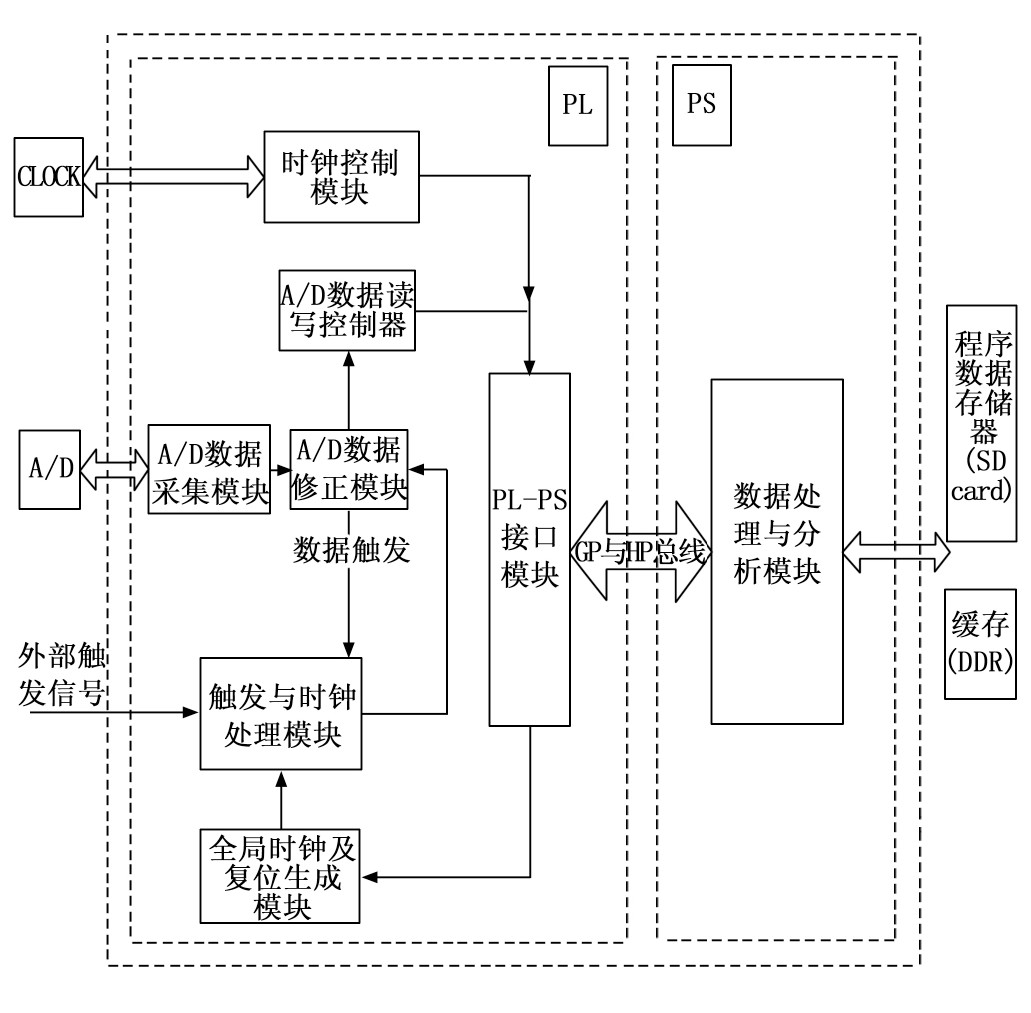
固件模块主要包括FPGA逻辑(PL)和ARM程序(PS)两部分。固件设计的功能框图如图3,包括:全局时钟及复位生成模块,生成各模块需要的时钟频率及相应频率的同步复位信号;PL-PS接口模块,实现PS对PL接口的寄存器读写和DMA数据读写;时钟控制模块,实现高分辨率的时钟频率,作为A/D芯片的采样时钟;触发与时钟处理模块,模块功能包括A/D采样时钟选择、外部触发信号选择;A/D数据采集模块,实时读取A/D芯片的采样数据,并将16路串行数据组帧传输给A/D数据修正模块;A/D数据修正模块,根据校准系数完成数据修正处理,并写入缓存;A/D数据读写控制器,该模块读写速率为100M*32bit,满足A/D最高采样速率1.5M*32bit的负荷,可实时对数据进行读取;数据处理与分析模块,该模块可编程,实现不同应用需求,在控制计算复杂度的前提下保障数据处理与分析的实时性。
驱动模块:为保证微型测量系统工作稳定性和兼容性,采用基于以太网的LXI总线通讯协议VXI-11;不同微型测量系统间的时钟同步使用基于互联网的IEEE 1588协议,实现不同测量系统之间的同步;系统访问使用VISA标准的接口,同时兼容NI-VISA和Keysight VISA。驱动程序接口为LabVIEW编程环境下的vi函数库,包括自检、连接、采集及故障处理等模块,自检模块包括通电自检、系统自检、读取检测结果、状态查询;连接模块包括连接、同步测试、断开连接;采集模块包括采集初始化、单次采集、有限点采集、连续采集开始、连续采集停止、读取存储器数据、清空存储器数据;故障处理模块包括重启、异常处理等。
2.6、 LAN总线接口模块
LAN总线接口模块,采用以太网作为传输总线,接入风洞测控网络即可实现数据的远距离传输,同时可基于IEEE1588协议实现多个微型测量系统的同步。
图3 微型测量系统固件功能框图
3 、微型测量系统静态校准
通过静态校准的方式标定微型测量系统关键性能指标,包括各通道线性度及误差限,确定系统是否满足风洞试验需求;并对低通滤波器频响进行评估,确定滤波器设计是否满足设计要求;开展天平静态加载测试,验证系统测量精度、天平匹配程度和抗干扰能力。
3.1、 线性度与误差限测试
按照“GJB5224—2004风洞测量系统设计及检定准则”对微型测量系统各通道的线性度、误差限进行检定[8]。
校准信号源为FLUKE 5520,测试前对测量系统及标准信号源通电预热30分钟以上。信号源电压调整并稳定3秒后开始采集,连续采集5次,采集间隔1秒,每次采集结果为200点平均,A/D采样率为2 000 Hz。线性度及误差限计算结果如图4所示,在1、100、200倍时,大部分通道的线性度和误差限小于0.02%,而500倍时,线性度和误差限有所增大,但控制在0.03%以内。综上所述,微型测量系统各通道线性度及误差限指标满足风洞试验小于0.03%的要求。
3.2、 低通滤波器频率响应测试
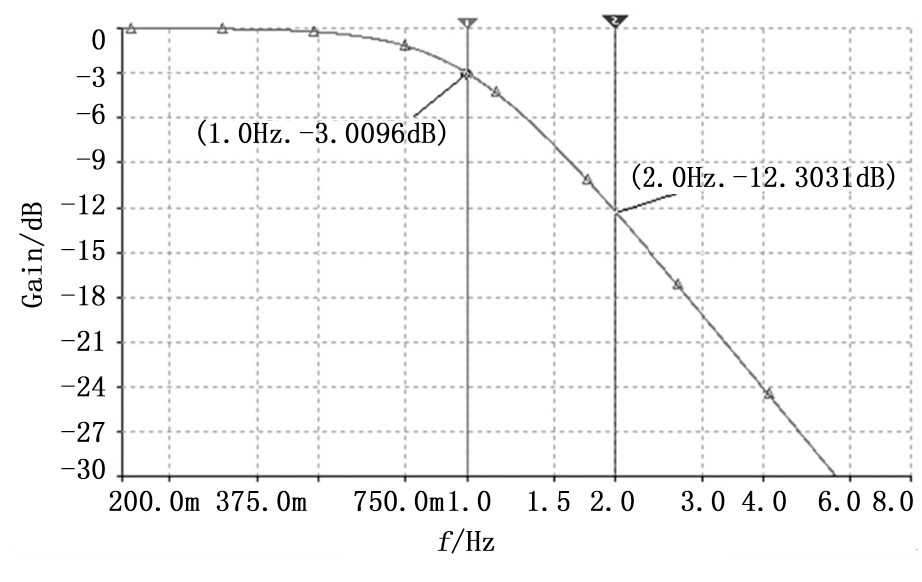
使用Agilent33522A信号发生器生成不同频率的正弦信号,微型测量系统开启连续采集模式,对信号衰减情况进行记录。结果如图5所示,3dB截止频率为1 Hz,滤波窗口内响应较为平坦,2Hz衰减约为12.3dB,满足二阶低通滤波器设计指标。
3.3 、天平加载测试
在模型地面准备平台进行天平加载测试,天平为六分量应变天平,包括3个方向的力(X、Y、Z)和对应的力矩(Mx、My、Mz),输出信号为电压信号,以差分接线方式接入微型测量系统。受地面准备平台的限制,仅对X元、Y元、Z元进行加载,加载砝码为40kg。Y元、Z元的测量误差为0.1%左右,而X元为0.5%。X元误差较大的原因是地面准备平台可调攻角最大角度为3.93°,40kg砝码在X元方向施加的力只有26.86N,相对较小,输出信号的细微波动就有可能产生较大的相对误差,使用60kg砝码后有所改善。
表1 某标模纵向导(系)数对比(不同采集系统)
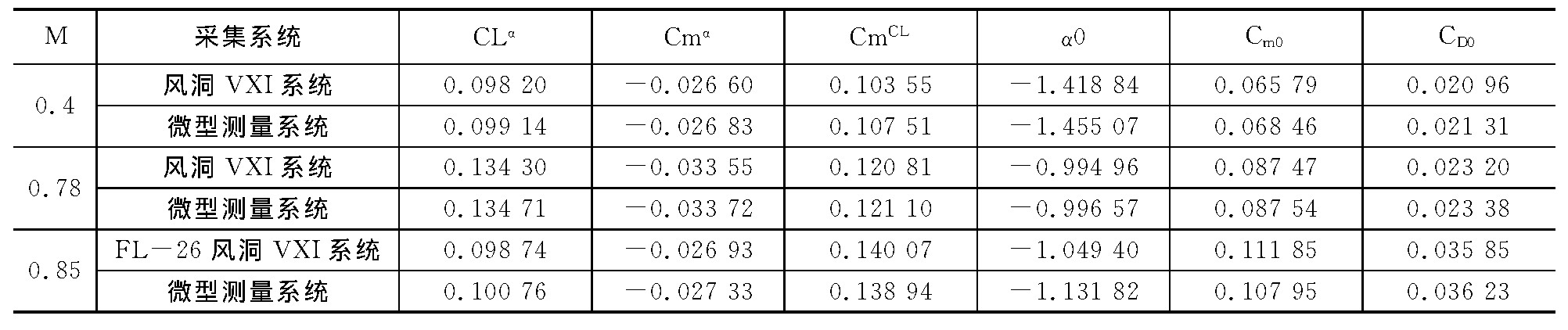
表2 某标模同期重复性精度
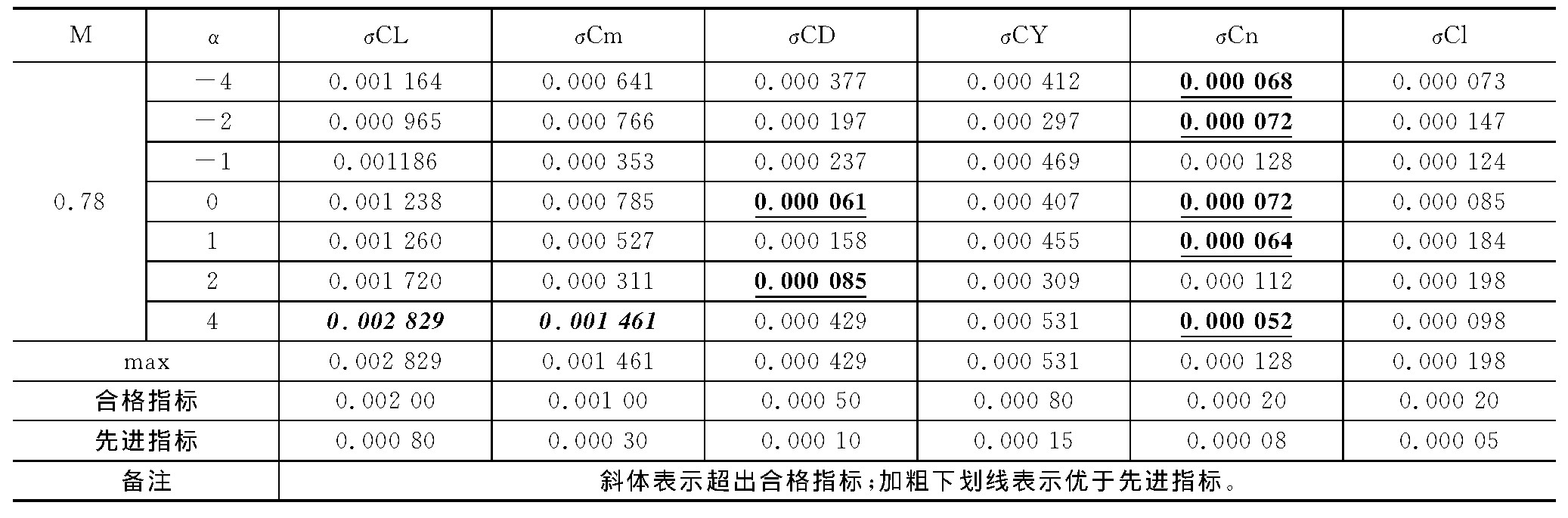
图4 静态校准结果
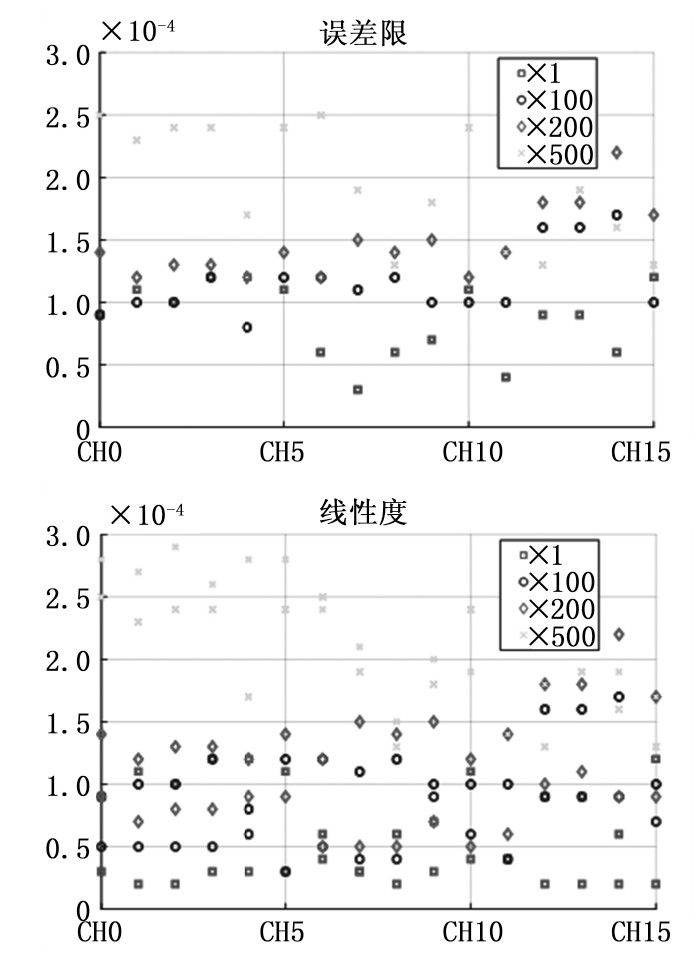
图5 微型测量系统低通滤波器幅频图
4 、动态调试试验结果与分析
动态调试试验在中国空气动力研究与发展中心2.4米跨声速风洞全模试验段中进行,包括标模测力试验对比以及测量精度试验两部分,试验模型为某大展弦比标模。微型测量系统放大倍率设置为200倍,滤波截止频率为1Hz。
无量纲的气动系数为测力试验的最终结果,计算公式如式(2)所示[9]。式中Ci为气动系数,包括:风轴系升力系数CL,体轴系俯仰力矩系数Cm,风轴系阻力系数CD,体轴系横向力系数CY,体轴系偏航力矩系数Cn,体轴系滚转力矩系数Cl。F为相应的气动载荷;q为动压,与流场参数中的马赫数、总压与总温有关;S为气动系数参考面积,Li为气动系数参考长度,均为模型参数。
4.1、 微型测量系统与VXI系统结果对比
分别使用微型测量系统和2.4米跨声速风洞VXI测量系统完成测力试验数据采集,对比试验数据处理结果,验证微型测量系统的可靠性。表1给出了相应的纵向导(系)数对比,其中α为模型攻角,两系统升力线斜率和焦点位置的差异较小。M=0.40、0.78对应的CLα差量分别为0.000 9、0.000 4,差异在1.0%以内;M=0.85时CLα差量为0.002 0,接近绝对量值的2.0%,相对较大,主要原因是高马赫数下CL-α曲线非线性特征明显,斜率计算误差较大。另外,3个马赫数条件下CmCL差量分别为0.003 9、0.000 3和0.001 1,对应焦点位置变化均小于0.5%气动弦长。
4.2、 微型测量系统标模结果精度分析
4.2.1、 测力试验精度指标
在M=0.78状态下进行了七次重复性精度测量试验,表2给出七次均方根偏差结果。可以看出:CL、Cm的精度达到国军标合格指标,小迎角范围内(-2°≤α≤2°)接近先进指标;CD的精度达到国军标合格指标,小迎角范围内(-2°≤α≤2°)达到或接近先进指标[10]。重复性试验结果和测力精度试验结果表明试验中微型测量系统工作稳定,试验数据精度较高,满足测力试验要求。
4.2.2、 重复性精度对比
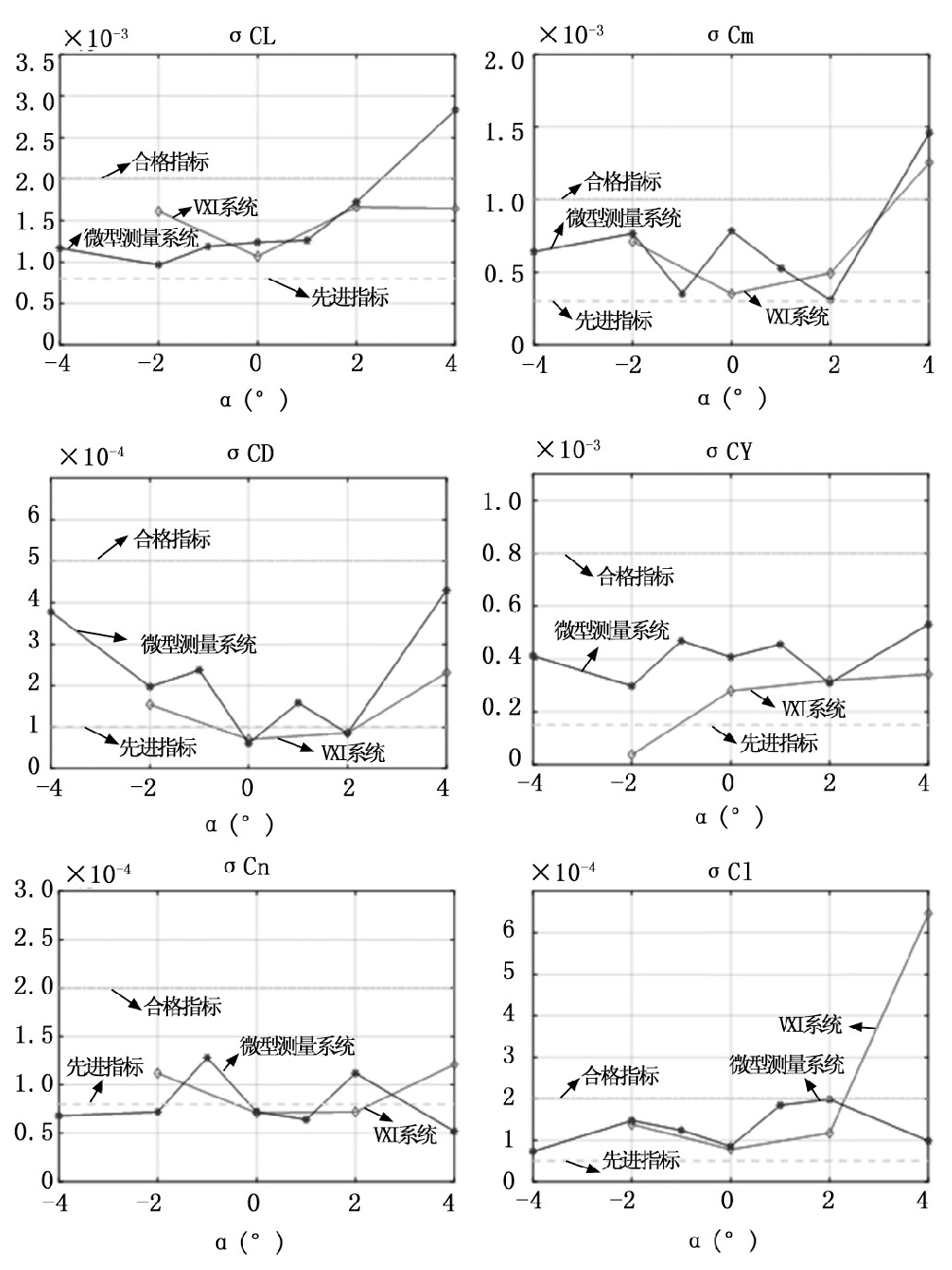
对比微型测量系统与VXI系统在M=0.78状态下的重复性精度指标,如图6所示,可以看到微型测量系统与VXI系统重复性精度指标相当,两系统绝大部分精度指标均在合格指标以内,部分达到先进指标。
图6 微型测量系统与VXI系统测量精度对比
基于标模试验结果,可以得出以下结论:动态调试试验数据规律合理,量值可靠;微型测量系统结果与风洞原VXI系统结果一致,数据准度满足试验要求;微型测量系统七次重复性精度满足国军标要求,数据精度较高,满足试验要求;微型测量系统与风洞VXI系统七次重复性精度相当。
5、 结束语
微型测量系统具有体积小、智能化、功能全、环境适应能力强的优点,实现了风洞常规数据采集系统的滤波、放大、模数转换等功能。通过静态调试及动态调试试验验证了系统的稳定性及主要性能指标,结果表明该系统性能指标满足风洞试验要求,可应用于常规信号数采,同时针对不便于布线、传感器分散、小信号的应用环境具有较高的应用前景,可在保持现有软硬件系统结构的基础上,对部分功能和接口进行扩展,即可满足相应的测量需求。
参考文献
[1] 施洪昌.高低速风洞测量与控制系统设计[M].北京:国防工业出版社,2001.
[2]谭正一,安丰增.基于PSI9116智能压力扫描阀的多路压力测量系统设计[J].航空兵器,2014(2):44-48.
[3]王彪,李昂,孙=洋,等.表面粘贴式MEMS应变传感器的应变传递分析[J].仪器仪表学报,2016,37(11):2606-2612.
[4] Edward Adcock,James Bartlett,et al.An embedded wireless data acquisition system for wind tunnel model applications[J].ICIASF,2001,327-336.
[5] Ray D.Rhew.NASA ATP Force Measurement Technology Capability Strategic Plan[R].2008,NASA Langley Research Center.
[6]韩杰,唐小珊,周平,等.风洞无线智能传感器网络及无线测量技术研究[J].实验流体力学,2009,23(1):94-98.
[7]张德久,姜德龙,武亮亮,等.基于无线技术的风洞速度场测量方法[J].兵工自动化,2017,36(6):37-39.
[8] 风洞测量系统设计及检定准则[S].GJB5224-2004,2005.
[9] 路波,等.高速风洞测力试验数据处理方法[R].中国空气动力研究与发展中心,2014.
[10] 高速风洞和低速风洞测力实验精度指标[S].GJB 1061-91,国防科学技术工业委员会,1992.