 0引言
0引言
常见的组合机构有实现预定轨迹要求的联动凸轮组合机构、凸轮-连杆组合机构、实现任意停歇或复杂运动规律要求的凸轮-齿轮组合机构、实现多种运动规律及轨迹要求的齿轮-连杆组合机构和齿轮与液压的组合机构等[1-6].这些机构能够实现特定要求的运动轨迹或复合运动,但是结构较为复杂,体积和重量比较大,并不适用于结构尺寸受限、运动规律过于复杂的场合。
复合运动机构中独特且结构较为简单的一种是复合运动齿轮副,它依靠齿轮副的节曲线形状变化实现旋转/直动复合运动。复合运动齿轮副包含正交复合运动锥齿轮副[7]、正交复合运动端曲面齿轮副[8]、复合运动面齿轮副[9]、复合运动非圆齿轮副和非圆齿轮齿条运动副。其中端曲面齿轮复合运动机构是在端曲面齿轮基础上提出的结合了凸轮机构、齿轮机构和非圆齿轮机构特点的一种新型的齿轮传动[10].这种运动副相比传统的组合机构结构更简单、可靠性更高,可以取代一些传统的组合机构,对于装备轻量化、简化机械结构意义重大。缺点是现阶段设计难度高,加工制造困难。针对端曲面齿轮的研究已经比较详尽,而端曲面齿轮副复合运动的研究却比较少,集中在齿面求解、运动规律的计算和应用方面[7,10].
本文对端曲面齿轮副复合运动的运动规律进行了仿真和试验验证,并计算了其啮合过程中的压力角和受力状况,为其设计和应用提供进一步的指导。
1运动规律
1.1齿轮副传动模型
如图1所示,齿轮1为普通直齿圆柱齿轮,其节曲线半径为r;齿轮2为端曲面齿轮,其节曲线半径为R;齿轮3为非圆柱齿轮,其节曲线为二阶椭圆,节曲线半径为r3(θ3)。端曲面齿轮是一种用于相交轴间 传递变传动比运动和动力的齿轮。端曲面齿轮的节曲线方程为:
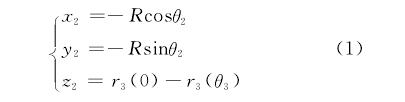
式中:θ2为端曲面齿轮的转角;θ3为非圆齿轮的转角。
当非圆柱齿轮3旋转轴固定并作为主动轮,端曲面齿轮2作为从动轮,其输出为变传动比的旋转运动,此时即为端曲面齿轮副;当以端曲面齿轮2作为主动轮,圆柱齿轮1作为从动轮,其输出为圆柱齿轮的旋转运动与圆柱齿轮的径向运动的复合运动;当以圆柱齿轮1为主动轮,以端曲面齿轮2为从动轮,其输出为端曲面齿轮的旋转运动和端曲面齿轮的轴向移动的复合运动。通过修改端曲面齿轮的节曲线可以相应改变输出端的运动规律,从而满足所要求的工作场合。本文以直齿圆柱齿轮1作为主动轮分析端曲面齿轮副复合运动的特性。
1.2运动规律
当以直齿圆柱齿轮为主动轮时,输出端轴向位移的运动规律为[8]:
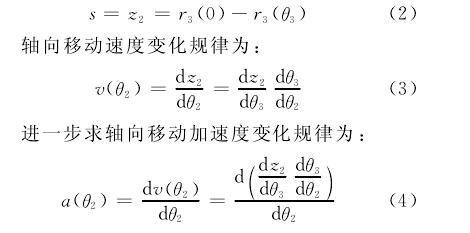
根据齿轮啮合原理,齿轮啮合过程中啮合点的瞬时速度相等,即v→1=v→2,v→1、v→2分别为圆柱齿轮、端曲面齿轮上啮合点的速度。对于从动轮(端曲面齿轮)有:v→2=v→t+v→a,对于主动轮(直齿圆柱齿轮)有:v→1=r→1ω→1,则端曲面齿轮切向速度
式中:v→t为切向速度;v→a为轴向速度。根据以上计算方法,复合运动端曲面齿轮副采用如下参数时:圆柱齿轮齿数Z1=12;齿轮副模数m=2mm;端曲面齿轮齿数Z2=36;偏心率k=0.1;节曲线半径R=35.91mm;端曲面齿轮阶数n2=2;主动轮转速N1=150r/min.可得端曲面齿轮副复合运动的运动规律如图2所示。
从图2可以看出,该端曲面齿轮副输出旋转/移动的复合运动,而且端曲面齿轮的旋转和轴向移动规律均呈现出一定周期性,当轴向运动的位移最大时,轴向运动速度为零,端曲面齿轮的转速也最大。
将端曲面齿轮复合运动的模型导入ADAMS仿真软件,施加相应的约束、载荷及驱动,如图3所示。仿真得到输出端端曲面齿轮的运动规律,将其与理论值对比,如图4所示。
从图4可以看出,端曲面齿轮副的位移的仿真结果随着主动轮转角的变化周期性变化,而且因为有误差和干扰的存在,仿真值与理论值存在一定的偏差,但二者的变化范围都基本相同,这验证了理论计算结果的正确性。
2受力分析
2.1受力分析
齿轮副啮合过程中的受力状况直接影响传动系统的设计和校核。复合运动端曲面齿轮副啮合过程中的受力状况如图5所示,图中1为主动轮;1′为随动轮,主要用于防止端曲面齿轮出现严重的偏载;2为从动轮。
当以直齿圆柱齿轮作为主动轮时: