机械工程论文

机械手臂论文研究热点范文8篇之第五篇:多关节机械手臂的运动规律及振动分析
摘要:本文以多关节机械手臂为例首先分析其运动规律, 构建了耦合动力学模型并以此为基础将机械手臂作为一个系统推导出其固有频率表达式, 分析与固有频率相关参数。其次, 提出使用反馈方法来检测手臂关节电机处的振幅和频率, 设计了硬件检测电路原理图。最后, 绘制实际振幅波形图, 分析振动规律, 为下一步如何消除或者抑制振动奠定基础。
关键词:多关节机械手; 振动; 动态特性;
0 引言
随着智能装备的不断发展, 越来越多的企业机械手臂的使用, 机械手臂不仅效率高, 而且国产化的不断发展也使其成本在逐步降低。但是机械手臂的振动问题一直以来没有很好的解决, 当机械手臂在某时刻的固有频率和激励源频率相同或相近时, 手臂的振动不断放大, 严重影响机械手的定位。
1 机械手臂模型分析
如图1 所示为机械手臂简化图, 机械手由三条手臂构成, 分别为臂1、臂2、臂3, 每个手臂之间通过电机转动连接, 臂1为最末端关节, 上面安装手爪来抓取物品。
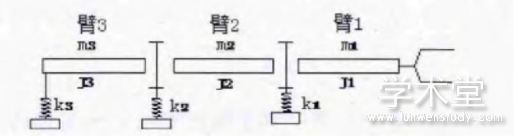
图1 多关节机械手臂简化图
通常对多关节机械手臂的抑制方法有以下几种:结构优化设计、反馈控制、输入指令等。 哈尔滨工业大学的刘延杰在《硅片传输机器人手臂结构优化设计方法》 (机械工程学报) 对机构优化设计有较深入的研究。本文着重从反馈控制研究对机械手臂振动的方法。
2 动态特性分析
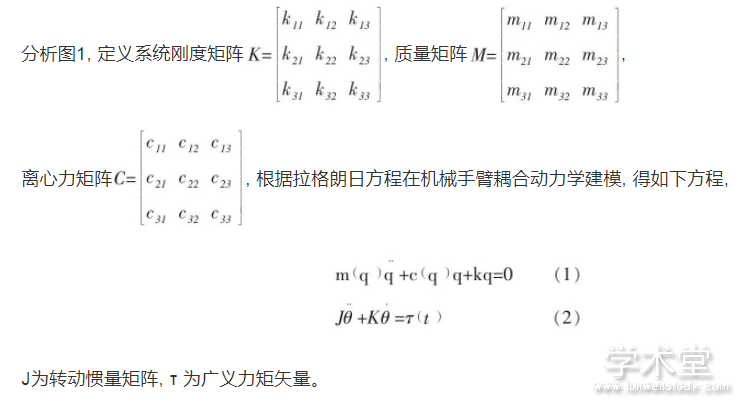
将整个机械手臂作为一个整体系统研究, 固有频率为系统的固有属性, 对多关节机械手臂的动力学模型分析并根据公式1, 得出固有频率公式:
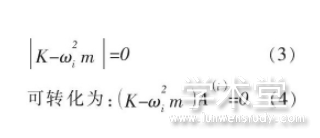
ω 为系统的固有频率, A为模态振动矢量。 由于机械手臂在运动中的位置始终变化, 其质量矩阵为时变矩阵, 所以系统的固有频率随机械手臂的位置变化而变化, 其值非定值。
3 机械手臂振动检测
(1) 检测硬件原理图
使用msp430 系列单片机相应速度快, 处理能力强, 性价比高, 故选择型号2553 作为核心处理芯片, 以压力传感器作为振幅检测元件, 构建硬件检测电路, 系统原理图如图2 所示, 传感器的检测数据通过AD574 转换为数字量传输给单片机处理, 单片机对数据滤波及分析后将结果传输给上位机。
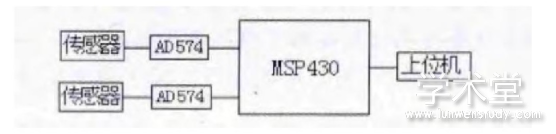
图2 振幅检测电路原理图
(2) 检测结果
振幅传感器安装在关节处的电机上, 构成半闭环控制方式。通过实验得到振动数据, 通过数据绘制其时域振动波形图。通过检测振幅的变化来调整机械手的运动规律, 使其振动避开固有频率, 保证机械手安全运行。
4 结语
以多关节机械手臂为模型, 建立动力学公式, 进一步求出系统固有频率表达式。 利用MSP430 单片机及振幅传感器为核心元件构建硬件检测电路, 测得关节处电极的振动规律并将振动数据传输给上位机控制中心, 为下一步的抑制振动奠定基础。
参考文献
[1] 赵童。结构振动的时滞鲁棒控制及其实验研究[D].上海, 2014.
[2]李茂涛。驱动力矩受限下双臂空间机器人轨迹跟踪控制[J].力学与实践, 2014 (06) .

汽车作为一种我们日常使用的交通工具,其运行条件以及运行环境的特殊性都是众所周知的。处于行驶中的汽车,由于路况以及其他原因,其换挡操作十分的频繁,这就使得变速箱中的齿轮、轴承以及轴本身出现故障的几率大大增加。在针对汽车故障原因的调查中,相关...
1磨机的应用概述。球磨机是一种传统矿石粉碎设备,已经开发运用一百多年了。从第一台球磨机问世以来,球磨机特别是筒形球磨机得到广泛应用,磨机的主体是一个水平装在两个大型轴承上的低速转动的筒体,由电动机通过减速机及周边大齿轮,或者由低转速同步电...
根据加工现场统计, 铝车轮在加工过程中, 内、外轮辋振刀, 胎圈座振刀、正面振刀较为常见, 其主要原因是机床、工件和刀具三个系统中任一个或多个系统刚性不足, 刀具切削产生的激振力与任一或多个系统固有频率相同或接近, 从而产生共振。...
采用M槽型/双重夹紧式螺纹刀片、直进的车削螺纹方法、设计科学合理的工艺基准和装夹定位方案, 在卧式车床上成功实现大螺距高精度螺纹的车削。为同行业展现一款大螺距高精度螺纹车削加工的成功案例, 也为公司在重大装备的科研项目中储备了技术力量。...