机械工程论文

摘要:2020年以来,新冠疫情的突然出现为各行各业均带来了巨大挑战,但同时也为数据中心运维工作带来了新的启示,无人化数据中心正加速从过往的理论研究走向现实,且得益于各种智能化技术的发展和应用,设备及机房基础设施管理者已经开始远程自动化执行对机房的各类巡检任务。对此,本文通过深入研究智能巡检建机器人的核心功能与部署框架,尝试总结了促进智能机器人与数据中心相互适应的优化方向及实施路径。
关键词:机房智能巡检机器人; IT设备巡检; 环境监测; 移动定位; 门禁交互; 无人化; 智能化;
近年来,随着数据中心规模的持续增长,信息科技部门的日常运维压力与日俱增,尤其是在基础设施维护方面,诸如机房环境巡检、设备巡检等重复性工作占据了运维人员较多的时间和精力,不仅使工作负荷加重,机房管理成本也随之不断上升。在此背景下,如何将运维人员从重复性的巡检工作中解放出来,并找到可媲美甚至优于人工的方式进行替代,已成为数据中心运维工作中的一大难题。对此,基于智能机器人的“无人机房”提出了一种全新的解决方案,同时还可提供更高效率、更高准确度、更全数据信息量的巡检结果。针对这一技术趋势,本文结合定制化、专业级服务机器人(以下简称“机房智能巡检机器人”)的核心功能,探讨了其在数据中心机房的阶段性应用成果,并提出远期发展建议,希望能为银行同业的基础设施运维工作提供一些启发和参考。
一、智能巡检机器人核心功能
当前,在数据中心机房及设备运维领域,机房智能巡检机器人的核心功能主要包含五个方面,即安全移动定位、IT设备巡检、机房环境监测、应用数据交互与状态自测监控(功能描述详见表1)。
二、智能巡检机器人部署框架
通常,机房智能巡检机器人的部署会涉及六点内容,包括机房、设备和环境搭建、网络建设、门禁系统对接、监控对接以及设备资产信息获取(如图1所示)。机房智能巡检机器人系统部署框架如图2所示。
1. 机房
在机房部署方面,考量重点是机器人能否在机房内正常行驶,其影响因素包括机房地板(通风地板或台阶)、机柜通道门禁、机房高度、通道宽度、充电桩安装位置以及回桩空间的大小等。简而言之,如果以上项目能适应或在改造后适应机器人行驶,则该机房可部署智能巡检机器人。
表1 机房智能巡检机器人功能描述
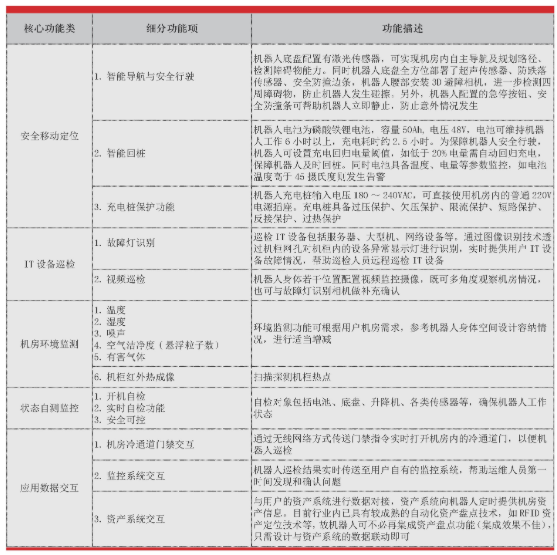
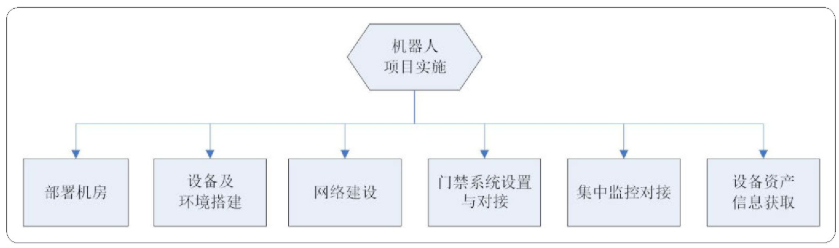
图1 机房智能巡检机器人部署内容
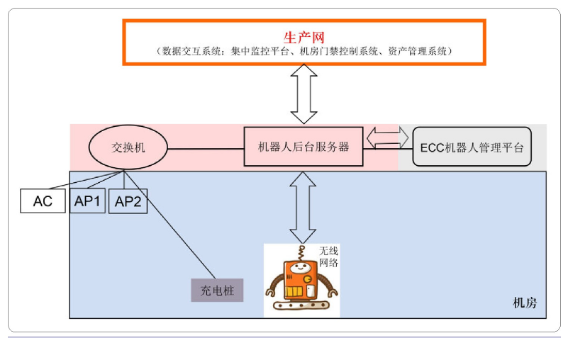
图2 机房智能巡检机器人系统部署框架
2. 设备及环境搭建
对于机房智能巡检机器人来说,其系统架构一般要将后台管理程序及数据库部署在单独的服务器内,以便后续进行多对一管理和数据集中管理。鉴于此,需要搭建专用的机器人后台管理服务器。
3. 网络建设
为保障机房智能巡检机器人对运维人员实时可见,其所在机房需部署无线网络,并确保机房智能巡检机器人可安全地接入网络。同时,考虑机房智能巡检机器人或会出现意外断网等问题,除需为机房智能巡检机器人设定断网后的安全回桩机制外,还应额外对充电桩进行网络定制,以使其具备有线联网功能,方便机房智能巡检机器人在回桩后可通过充电桩进行数据传输。
4. 门禁系统对接
目前,大部分数据中心机房都进行了冷热通道封闭,导致通道门成为影响机房智能巡检机器人正常行驶的一大障碍。对此,如果机房采用了电子可控门禁系统,即可设计机房智能巡检机器人直接访问门禁系统的方式来开关通道门,但倘若机房内通道门无门控装置,且只能通过人力拉开,则必须进行通道门改造。此外,其他类别的通道门只要具备门控盒,也可为其配置一对射频硬件作为开门模块,进而基于射频方式对接门控进行开关门操作。

机房智能巡检机器人
5. 集中监控对接
在监控对接方面,为使值班人员第一时间知晓机房智能巡检机器人的巡检情况,机器人管理平台需设计专门的监控对接程序,以进行监控保障。
6. 设备资产信息获取
在设备资产信息获取方面,如果机房内已部署完整的自动化资产盘点系统,则机房智能巡检机器人可设计成直接从资产管理系统中获取设备资产信息及位置,以便于机房智能巡检机器人进行设备巡检。但是,如果机房内尚未部署自动化资产盘点系统,则相对于机器人具有硬性先天条件约束的资产盘点功能,RFID等成熟高效的资产盘点技术是更好的选择。
三、应用实践及总结
1. 阶段性应用成效
目前,由中国工商银行基础技术实验室参与研制的机房智能巡检机器人已进入机房试点,试点机房面积约600平方米,机柜总量231台,机房IT设备总量709台,机房内实施了机柜冷通道封闭,且冷通道实行门禁控制管理。从应用实践来看,使用机房智能巡检机器人进行全量机柜巡检,单次全量巡检耗时约3小时、单机柜约40秒、全程耗电约20%。同时,机房智能巡检机器人还可按所属单位要求,独立进行各机柜通道的定时巡检,并报送巡检结果。据统计,机房智能巡检机器人对非网络类设备的巡检识别正确率约为99%,但其对网络类设备的巡检识别准确率偏低,且由于网络设备存在业务灯闪烁和网线遮挡等干扰,尚需进一步优化识别机制,以提升识别准确率及优化巡检时长。总体而言,机房智能巡检机器人在巡检功能表现、巡检时间、充电情况、运动安全度、自身健康状态、对外交互等方面都与预期相符,因此判断其已经可逐步替代人工巡检。
2. 远期发展建议
综合机房智能巡检机器人的应用情况,当前该机器人在数据中心机房运维领域的应用尚处于起步阶段,离正式大规模推广尚存在一定距离,尤其在机房巡检时间、各设备适用智能性等方面均有较大的提升空间。此外,基于现阶段的实践效果,机房智能巡检机器人在中小面积机房的应用效果更佳,而大面积机房的整体巡检时间会过长。后续,中国工商银行将继续深化机房智能巡检机器人的相关研究,并不断优化、更新其各项功能,如伴随图像识别处理、语音识别处理、智能行驶、机械臂、机械手掌等技术的持续发展,将尝试使其应用范围逐步扩展至硬件智能运维领域,从而为真正实现无人化、智能化数据中心打下坚实基础。
参考文献
[1]德尔阿特,克斯.机器人感知:因子图在SLAM中的应用[M].刘富强,董靖,译.北京:电子工业出版社,2018:33.