软件工程论文


1 引言
在某些特定应用场合,需要用天线快速、精确跟踪飞行目标。因此,要求天线跟踪系统满足以下两点。
首先,要求运算速度快,尤其要求伺服系统对反馈信号迅速做出反应;其次,要求跟踪系统体积小重量轻,能够灵活机动。本文针对天线跟踪系统的伺服控制介绍一种软件实现方法。
2 天线跟踪系统总体设计
天线跟踪系统总体设计框图如图 1 所示。系统主要由 PC、嵌入式控制单元、伺服单元、天线单元和信号处理单元组成。

PC 的功能是解析信号处理单元送来的目标信息并进一步处理,然后把结果发送给嵌入式控制单元;同时,PC 还要接收来自嵌入式控制单元的坐标信息;最终以界面图形的形式展示出目标的运行轨迹。
嵌入式控制单元主要是通过与 PC 通信,获取目标的方向信息,从而控制伺服单元的方位和俯仰电机,进而控制天线单元始终对准目标方向。由于嵌入式控制单元需要快速运算并带有 PWM 驱动信号输出功能,因此数字信号处理器选用 TI 的 TMS320LF28系列芯片。
伺服单元是本系统的执行机构,用于实现天线作±150°方位旋转和俯仰 60°旋转。伺服单元主要由伺服电机、电机驱动器和光电编码器等组成。其中,伺服电机是本系统的驱动元件,其产生的转动力矩应保证天线按规定的技术要求定向;电机驱动器是伺服电机的驱动信号源,其输出的电信号可直接带动电机转动;光电编码器完成角度测量,并把执行后的状态反馈给控制单元。
天线单元由发射天线和接收天线组成,天线单元与空中飞行目标通过信息交互完成目标跟踪、控制及搜集信息等功能。
信号处理单元主要负责解析出天线单元接收到的目标信号,并经过滤波、放大、数字化处理等过程,最终送给 PC 进行处理。
2.1 嵌入式控制单元软件
嵌入式控制单元软件主要实现两个目的,一是实现与 PC 的串口通信;二是实现伺服单元的电机转速转向控制。
2.1.1 串口通信的数据格式
a. 通讯协议
通讯方式:RS422;数据包长度:8 字节;数据格式:1 起始位,8 数据位,1 停止位,无校验;波特率:115200bps.
b. 控制指令格式
1 个起始字节 + 2 个控制指令字节 + 2 个方位转动速度/角度字节 + 2 个俯仰转动速度/角度字节 + 1个校验和字节,共 8 个字节。
c. 反馈指令格式
1 个起始字节 + 2 个状态反馈字节 + 2 个方位位置角度字节 + 2个俯仰位置角度字节 + 1个校验和字节,共 8 个字节,数据包各字节定义此处略。
对于控制指令和反馈指令,为保证起始字节唯一性,除起始字节外其他字节 D7 位均设置为 0.
2.2.2 伺服控制的软件设计
伺服控制的软件首先要对 DSP 芯片进行上点后的初始化,然后对伺服机械设备归零处理,最后再根据控制指令控制伺服电机的方向和角度。具体程序流程如图 2 所示。
a. 初始化
初始化子程序主要是对DSP器件的I/O口、串口、PWM 输出口,以及光电编码器的输入口初始化等。
b. 伺服归零
伺服归零子程序是实现伺服机械结构的寻找零位的功能。以方位方向为例,首先,DSP 输出 PWM信号让伺服电机向左转到限位开关位置;然后向右转到限位开关位置,通过计算,得到中间位置即是零位;最后使电机转到零位即完成伺服归零工作。
c. 控制算法
控制算法是伺服控制软件最重要的部分,在本设计中对伺服的控制有三个过程,即加速过程、匀速过程和减速过程。这样设计既提高了系统的响应速度,同时可避免启动和停止时的冲击过大问题。对于加速过程和减速过程二者数据可设计成对称关系,因此,在这里只对加速过程进行分析。

加速过程有两个重要指标需要确定:一个是加速持续时间,另一个是加速度的大小。对于加速持续时间,可以通过负载总力矩、电机输出力矩、电机可转动的最大角度计算出来。为了软件的归一化处理,计算出当给定最大转动角度时的加速过程占整个转动过程的比例。此比例作为软件处理任意给定角度的统一比例。加速度大小的确定稍微复杂,如果单纯给定一个固定加速度,其角速度是时间的一阶函数,电机的启动和停止会有超调现象。对于本系统,为了尽量快速跟踪,需要变加速的方法实现加速和减速。根据位置 PID 算法,首先确定比例环节。方法是选取几个典型离散点把比例控制的作用由弱变强,检查系统各次对应的输出响应,从中选出输出反应快且超调理想的比例系数。其次,若系统稳态误差和响应时间在技术指标要求的范围内,则控制算法只需采用比例控制。否则,还需要给加入积分环节,先将比例系数减少到原来的一半,再给算法加入积分环节观察效果,然后同时调整积分和比例参数。最后,如果动态过程不理想,则再加入微分环节。
3 实验结论
通过实际测量对比,采用固定加速度驱动电机时,存在超调转速不平滑的缺点,如图 3a 所示;而采用变加速度的 PID 算法控制电机时,如图 3b 所示,可使系统动态响应性能更好,角速度变化更平滑,特别是在启动和停止时刻几乎没有冲击现象。
参考文献
1 张宇河,金钰。计算机控制系统[M]. 北京:北京理工大学出版社,19962 陈隆昌,阎治安。 控制电机[M]. 西安:西安电子科技大学出版社,20033 曹卫彬。 C/C++串口通信典型应用实例编成实践[M]. 北京:电子工业出版社,2009

1开发背景教育信息化的实施,自上至下而言,必须与学校的制度创新、组织创新和管理创新结合;自下至上而言,必须以作为学校主体的工作人员使用信息技术水平的逐步提高为基...
0引言管理信息系统(简称MIS)是一个供使用者利用计算机、网络通信设备以及其他办公设备,对所需的信息进行采集、传输、处理、格式转换及存储、信息更新、功能拓展和维护的系统。[1]我国高等职业教育虽然起步比较晚,但在高等教育大众化的今天,高等职业教...
第3章系统设计3.1数据库设计3.1.1概念结构(1)住户信息数据库结果设计,通过对以往小区物业管理实际需求情况及常用的信息分析,其住户信息主要包括了住户编号、房屋编号、户主名称、联系电话以及联系地址等信息,其结果图如图3.1所示。3.1.2实...
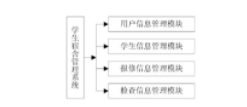
本文首先对学生宿舍管理系统进行了需求分析,然后又介绍了学生宿舍管理系统的整体设计,将系统分成用户信息管理、学生信息管理、报修信息管理和检查信息管理四个模块,最后对系统各模块设计进行了简单的概述。...
第4章系统测试系统测试是在系统详细设计功能实现后,借助专业测试工具对系统的功能和性能进行全方位模拟测试的过程,用于检验系统设计是否符合设计预期,发现系统潜在故障及问题并于系统实现前改进。本课题中的系统测试紧密结合软件工程要求,分单元测试...
阐述了协同设计的方式方法一部分是已有实际工程应用经验的总结,还有一部分则是在PDMS软件平台上各专业协作设计的尝试和探索。...
空气质量问题一直影响并制约着经济发展和人民身体健康,其重要性显著。空气污染通常是由于人类活动或自然过程引起某些有害物质进入大气,当达到足够的浓度和时间时,并危害人类的舒适度或环境的现象。...
1、概述随着教育信息化进程推进,高职院校的教务管理也逐步推进信息化建设。传统的教务管理系统都是基于B/S架构的业务系统,其功能覆盖了教务管理的大部分核心功能,如学籍、教学计划、教学资源、教学任务、排课、选课等,但是这些核心功能的信息流向都呈...
第一章绪论1.1课题的背景及意义。随着计算机技术的发展,计算机应用逐渐由大规模科学计算转向以数据库管理系统为开发环境,对大规模的事务处理和对工作流管理的管理信息系统[1-2].计算机已经渗入到了我们日常生活、工作和学习的方方面面,同时也包括了...
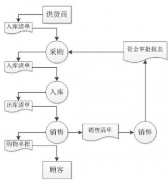
本文以软件工程理论为指导, 将网络编程技术引入到企业商品的进销存管理中, 实现商品流资金流的高效管理。...