数字图像处理论文


大蒜在我国种植面积广泛,年产量约 175 万t,出口 31 万 t,出口规模为世界第一。由于不同国家对大蒜规格要求不同,我国作为大蒜的主要生产和出口国,要使大蒜产生巨大的经济效益必须适应国际市场对大蒜的规格要求,如: 美国、日本市场要求柄长为 2 cm; 东南亚地区要求规格均匀,柄长不超过 2. 5 cm 等。根据金诚谦等[2]研究,要使大蒜蒜瓣的形状规则、大小均匀,那么在种植大蒜时,就要使蒜瓣直立瓣尖朝上种植。因此,在机械化的大蒜种植时,使蒜瓣瓣尖朝上种植成为大蒜机械种植中研究的关键问题。
随着图像处理技术的不断发展,以计算机为基础的图像处理应用越来越广。如人脸的识别,车牌的识别以及种子的面积、边缘,根据种子图像识别胚芽的位置等等。本文采用图像处理,以蒜瓣为研究对象,应用图像处理中的大蒜蒜瓣的原始图像,对其进行灰度处理、中值滤波、二值化、边缘检测和角点检测识别大蒜瓣尖,并利用 Mat-lab7. 1 软件编写能够判断大蒜瓣尖朝向的程序,实现计算机根据蒜瓣图像识别蒜尖的朝向。
1 图像获取及处理
大蒜蒜瓣的图像通过采用 CCD 数码相机在分辨率 640 ×480 下获取,每个像素点大小为 320× 240 矩形区域。 图像处理在计算机上完成(CPU 2. 0G) .操作系统为 Windows XP,工程计算软件以 MATLAB 7. 1 的图像处理工具箱作为图像处理和分析主要平台。
考虑到实际图像采集过程中,大蒜蒜瓣图像会遇到各种随机噪声干扰,在图像上产生不可预测的随机噪音,形成不需要的孤立像素点,对大蒜蒜瓣图像区域分割、分析和判断带来不利影响。因此,为避免噪音像素点造成的图像处理中不能正确反映大蒜蒜瓣信息的问题,采用非线性的中值滤波去除大蒜蒜瓣图像噪声干扰的方法,既可去除噪声又保护了图像的边缘清晰的特性。
采用中值滤波把大蒜蒜瓣图像中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近真实值,从而消除孤立的噪声点。
同时在大蒜蒜瓣图像平滑的处理中,将含有一定数目像素的滑动窗口各点灰度值的中值来代替指定点的灰度值。对于奇数个元素,中值为大小排序后中间的数值; 对于偶数个元素,中值为排序后中间两个元素灰度值的平均值。本文采用 3× 3 窗口对图像进行平滑处理,如图 1 所示,运用中值滤波算法对蒜瓣原始灰度图像滤波后的图像如图 2 所示。
1. 1 图像二值化
相机拍摄到的图像是大蒜蒜瓣的彩色图像,在进行图像处理时,为了提高速度和效率,需要将大蒜的彩色图像进行二值化处理,使得图像变得简单,而且数据量减少。首先将大蒜蒜瓣图像转换为灰度图像,再进行阈值化处理,将灰度图像转换为二值图像。
数码相机拍摄的图像为彩色图像,为了进一步提高图像处理速度和效率需将其转换成二值图像。首先将彩色图像转换成灰度图像,然后用阈值化处理,即选择一个阈值 T,将图像转换为二值图像。图像的二值化处理的变换函数表达式,即
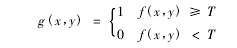
为了使大蒜蒜瓣图像能够从灰度图像中形成而知图像分离出来,并且突出大蒜图像的点阵,通过直方图求出二值图像的阈值。在直方图中,采用图像中的目标和背景形成的两个波峰之间低谷的灰度值 T 作为阈值对大蒜蒜瓣图像进行二值化处理,如图 3 所示。
1. 2 蒜瓣图像 Canny 边缘检测
对大蒜蒜瓣图像进行的二值化处理,得到二值图像。再进行图像的边缘检测,从而获取图像的边缘二值图像,采用 Canny 边缘检测算法对大蒜蒜瓣的形状特征和边缘检测信息进行提取,识别出图像中的实际边缘。在大蒜蒜瓣边缘的二值图像的 Canny 边缘检测时,先通过滤波器平滑图像,使图像平滑均匀,同时抑制噪声; 用一阶偏导的有限差分计算大蒜蒜瓣图像梯度的幅值和方向; 再对梯度幅值进行非极大值抑制; 最后用双阈值算法检测和连接边缘,得到大蒜蒜瓣边缘为白色轮廓,蒜体和蒜瓣之外区域为黑色背景的边缘图像。
因此,采用 Canny 边缘检测进行籽粒二值图像的处理,既可有效抑制噪声,又可精确确定边缘位置,所以该算法可以在检测边缘时取得较好地平衡。采用 Canny 边缘检测算法获得的边界图像如图 4 所示。
2 基于 SUSAN 的大蒜瓣尖识别算法
2. 1 大蒜瓣尖特征分析
由于大蒜瓣尖的特殊性,在经过二值化和边缘检测之后形成的图像是大蒜的边缘曲线,通过对大蒜边缘图像分析可知大蒜蒜瓣的蒜头和蒜尖是整个大蒜蒜瓣弯曲最大的部分,而大蒜瓣尖是最尖的地方。因此,识别出图像中大蒜瓣尖的位置,即可以识别出大蒜瓣尖方向。曲率是表明曲线在某一点的弯曲程度的数值,曲率越大,表示曲线的弯曲程度越大。因此,分析大蒜蒜瓣的弯曲程度,用曲率作为尖端的特征参数,就可以识别出大蒜二值图像中的瓣尖位置。
2. 2 大蒜瓣尖的识别方法
大蒜边缘二值图像是由一个个的像素点组成,这些点组成的边缘曲线实际上是一系列的离散曲线。通过对边缘二值图像的离散点进行分析,计算离散曲率成为大蒜蒜瓣边缘曲线分析的一个难点。由于大蒜蒜瓣的边缘二值图像蒜尖和蒜头出的弯曲较大,因此,对图像分析可以不需要找到边界上的每一个点的实际曲率,只要计算出这些点中曲率最大的点,该点所对应的大蒜蒜瓣的位置即为蒜尖位置。
基于 SUSAN 角点检测算法的图像识别可以准确的计算出图像中的角点,该算法利用一个核的中心圆形掩膜,在大蒜蒜瓣二值边缘图像的整个区域内移动这个掩膜,与黑色区域接触,在掩膜所处的黑色区域内,这些点与掩膜和的灰度值如果相近,就构成同化核分割相同值区域,即 US-AN.根据 SUSAN 算子计算 USAN 值的大小来判断大蒜蒜瓣的角点,角点值越小,角点处越尖,曲率越大,再由曲率值计算确定大蒜瓣尖的位置。

随着时代的进步,人类的文明程度也在逐渐的提高,对很多事物有了新的要求和看法,这一看法体现在图像上就是对图像的美化。随着科学技术的不断发展,计算机技术也在不断的改变。基于人们思想的转变与技术的发展,人们对图像的要求越来越高,如何应用将图像与...
改革开放以来,随着计算机的飞速发展,从以前计算机寥寥无几已发展到现在的几乎家家户户都有。在进入信息化时代的今天,快速有效率地获取信息将直接影响到人们的思维和决策。我们感知事物的主要途径就是图画,计算机图形图像处理技术不仅可以使人们所看到的...
本文分析了几种常见的图像预处理技术,有效的图像与处理手段,不但能最大程度保留图像的有用信息,还能降低后续图像学习、检测、识别的难度,并最终转化为识别准确率的提升。...
舌诊作为中医望诊的重要组成部分,一直是临床辨证及疗效评价的重要依据之一,传统舌诊方法主观性强且易受光线、环境等不确定因素的影响,因此,限制了中医诊断方法与技术的发展。然而20世纪90以来,计算机图像识别方法的应用促进了舌诊客观化的发展,数字图...
1简述计算机以及信息技术的快速发展,让数字图像处理技术不断完善,并形成了全新的学科门类。同时随着人们对计算机、智能技术等进行深入研究,数字图像处理技术更加具有实用性。人们开始利用计算机进行图像信息处理,如对图像质量进行改善以及压缩图片等。...
计算机技术深刻地改变着人们的生产和生活,几乎涵盖了生产和生活的各个方面,其中在消防灭火方面也有显着体现。通过智能化的软件设计达到消防灭的目的。将多媒体技术应用到消防灭火中,不仅能够保障人民群众的生命财产安全,还可以促进社会经济的发展。特别...
0概述计算机图像处理技术指的是技术人员运用计算机知识对数据或图像信息进行相关处理的一种技术。随着计算机信息技术的快速发展,利用计算机信息技术实现了人类视觉功能,并把所测的对象映射成数字图像,经过处理后实现了对数字图像的分析、加工、处理和输...

CAD技术因其方便、富有创意和视觉冲击力,在园林景观设计过程中得到了广泛的应用。计算机辅助设计(CAD)技术由于其修改方便、绘图快捷美观的特点已成为景观设计的主流技术。...
随着经济的不断发展,科学技术的不断进步,计算机时代已经到来,利用计算机对图像进行处理的技术已经逐渐影响到了人们生活和工作的各个方面,给人们带来越来越多的便利。到目前为止,计算机数字图像处理技术已经被广泛应用于各方面。1数字图像处理技术的发...
计算机技术不断发展进步,应用领域不断拓宽,图像处理技术就是在计算机技术的发展下兴起,并逐步地被应用在广泛的领域,农业领域就是其中之一。自古以来,我国是农业大国,随着生活与技术的进步,提高农作物品质、远离病虫侵害也成为关注的焦点,但农作物总...