计算机应用技术论文

摘要:随着科学技术的发展,在农业灌溉系统设计过程中,必须重视引入高效的农业智能灌溉技术。基于此,通过技术研究,分析基于计算机辅助控制与PLC技术的农业智能灌溉系统的设计策略,不断提高研究水平,从而为农业智能化灌溉工作提供有效的技术支持。
关键词:计算机辅助控制; PLC技术; 农业; 智能灌溉;
作者简介: 刘铸德(1980-),男,广西凭祥人,本科,工程师,研究方向为计算机辅助控制技术、PLC技术。E-mail:xjjy2010@126.com.;
随着农业生产技术的不断深入发展和农业结构的不断调整,农业智能化灌溉技术在农业灌溉中的应用也进一步普及,对技术的要求也越来越高。利用计算机辅助控制技术与PLC技术结合建立起的农业智能化灌溉系统,解决了传统灌溉技术中效率偏低、管理偏难等问题,进一步提升了农业智能化灌溉系统的应用效率。
1、系统总体设计
农业智能灌溉系统主要由计算机辅助控制系统(上位机)、PLC(下位机)、A/D转换器(模数转换器)、土壤湿度感应器、执行控制模块、灌溉设备和报警设备构成。工作原理框图如图1所示。
该系统工作时,先由土壤湿度传感器取值,将土壤湿度值通过A/D转换模块将模拟信号转换成数字信号后传输给PLC,之后PLC将信号传给计算机辅助控制设备,计算机辅助控制设备经过自动调节或者人工手动控制后,将调整后的参数传回给PLC,由PLC通过PID计算程序发出命令控制对应的执行控制模块启停灌溉设备,实现对灌溉的智能运作[1,2,3].
本系统的核心设备为由上位机和下位机两个部分组成。上位机主要采用计算机辅助控制系统,设置对应的操作控制界面,可对控制参数进行设置,可实时监控下位机,可对相关数据进行查询等;下位机主要采用PLC控制器,主要功能用于接收上位机的控制操作指令、接收土壤湿度传感器模拟量输入信号等,并根据系统的要求,计算、处理和输出对应的命令,驱动外部相关控制设备。
2、系统硬件设计
系统硬件主要由计算机辅助控制系统、PLC控制器、A/D转换器、土壤湿度传感器、执行控制模块、灌溉设备和报警设备构成。
2.1 计算机辅助控制系统(上位机)
作为系统核心的控制组件,计算机辅助控制系统在硬件上须具备稳定的硬件工作环境,在控制软件上能对灌溉系统各项指标进行调节和设定,需支持主流的连接协议,实现对设备的调控、监视、数据采集、报表汇总等功能。
2.2 PLC控制器(下位机)
作为系统的核心执行组件,PLC必须具备稳定的工作状态,多节点、多级数采集传输模式,支持主流的连接协议,配备足够的输入端子和输出端子,同时可外接相应扩展模块,尽可能多收集设备的输入信号传输给上位机,满足系统的调整和控制要求。
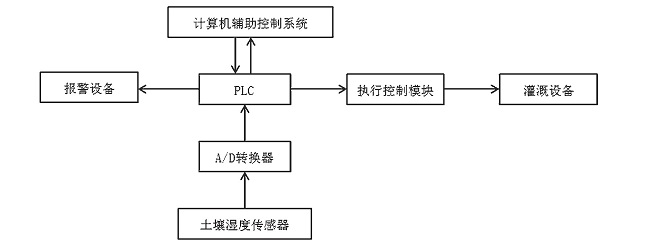
图1 智能灌溉控制系统工作原理框图
2.3 土壤湿度传感器
新型的土壤湿度传感器可利用电磁脉冲原理,根据电磁波在介质中的传播频率来测量土壤的表观介电常数,得到土壤容积含水量,具有简便安全、快速准确、定点连续、自动化、宽量程和少标定等特点。
2.4 A/D转换器(模数转换器)
根据本系统对系统输入/输出信号的要求,需将现场由土壤湿度传感器检测产生的连续模拟量信号转换成PLC识别的可以接收的数字量信号。为确保转换的准确率,应选取数字量位数多、分辨率高、功耗低的设备型号。
2.5 执行控制模块
执行控制模块,主要用于控制灌溉设备的启停。目前常见的执行控制设备一般为电磁阀,其所具备的高安全性、适用性和可靠性是控制模块必备的工作特性。
2.6 灌溉设备
用于农业的灌溉设备有很多类型,如水泵、滴灌管、微喷头、微喷带等,根据不同的应用场景,应按实际选择不同的灌溉设备,以利于农作物的灌溉作业。
在选择灌溉设备时,要与执行控制模块所选择的设备配合使用。
2.7 报警设备
报警设备接收上位机发出报警信号,例如湿度过低、灌溉时间过长等,可以声、光等形式发出报警信息,提醒管理人员及时处理。
3、系统软件设计
软件设计方面,由上位机计算机辅助控制软件和下位机PLC执行软件构成。程序的核心思想是由上位机负责对参数进行调节,下位机接收上位机的调节指令,通过PID算法输出执行参数实现对灌溉设备的控制。
3.1 上位机软件设计
智能灌溉系统的控制由上位机进行。软件系统采用图形化的编程语言,如Microsoft Visual C++,能与硬件进行直接通信,其图形化的编程特点可建立虚拟化的仪器图表,提取下位机的PID参数并可在图形界面上显示和调节。
软件的设计思想是将下位机所获取的土壤传感器检测土壤湿度含量,与程序设定土壤湿度信号最小值和最大值相比较,根据偏差量向灌溉设备发出“开”“关”指令,保证土壤湿度达到设定范围,并且当土壤含水量低于设定最小值或最大值时向报警装置发出报警指令,使报警装置启动,及时进行告警。
软件在实际设计过程中需要研讨湿度比较的方案,在灌溉操作执行过程中,由于土壤渗水较慢,土壤湿度具有惯性大、非线性等特征,为了避免误判,一般需要对设定的单位时间内两次以上所采集土壤湿度值进行比对判断后,再输出对应操作。
3.2 下位机软件设计
下位机软件为PLC执行软件。在软件设计中可以在插入以太网初始化程序后进行程序编写,通过专有协议,经过以太网模块、交换机、双绞线等方式连接到计算机辅助控制软件,实现上位机与下位机的通讯联动,对设备发出相应指令。
下位机算法的基本思想:1)土壤湿度传感器将通过A/D模块将土壤湿度信号转变成数字信号传送给PLC,PLC通过程序运算将信号变成实际的湿度值;2)PLC将湿度取值传送给上位机进行比较设定,根据上位机给定的设定值经过PID运算处理后,通过脉冲输出模块,输出对应的脉冲信号到执行控制模块,执行控制模块根据输入值进行对应操作,完成一轮灌溉作业[4,5].
3.3 智能灌溉节水系统软件设计模式实践
3.3.1手动灌溉模式
为了满足特定环境下的灌溉需求,本系统具备手动灌溉模式。手动灌溉模式是指由人为调节执行控制模块的开启和关闭,当开启指令发出后,后端灌溉设备开始工作;关闭指令发出后,后端灌溉设备停止工作。工作指令由上位机手动设定发出,下位机接收并转发给控制模块执行,具体流程图如图2所示。
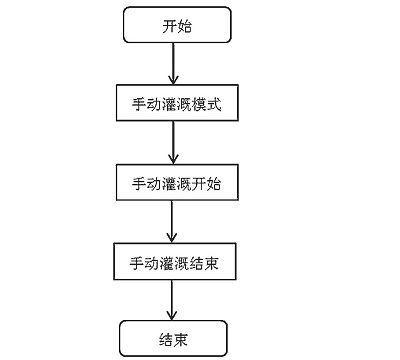
图2 手动灌溉模式的设计流程图
3.3.2自动灌溉模式
自动控制模式是指由系统自动控制进行灌溉操作。系统根据土壤湿度感应器提取的当前土壤含水率的数值,将数值与用户设定的土壤含水率的数值相比较,根据PID算法对比计算出是否需要对农作物进行灌溉操作。其运行模式为:当提取数值小于用户设定下限值时,发出命令执行灌溉;当提取数值高于用户设定上限值时,发出命令停止灌溉。土壤湿度具有惯性大、非线性等特征,因此自动模式中对湿度的传感器土壤湿度的取值应在设定的单位时间内取至少两次土壤的湿度信息与用户设定值进行比较。当两次以上获取到的湿度信息达到启动或者停止值时,才进行启停操作,具体流程图如图3所示。
3.3.3定时灌溉设计
定时灌溉设计是指由管理人员设定好灌溉开始的时间和结束时间,当到达灌溉开始时间后,灌溉设备开始工作;当到达灌溉停止时间后,灌溉设备停止工作。具体流程图如图4所示。
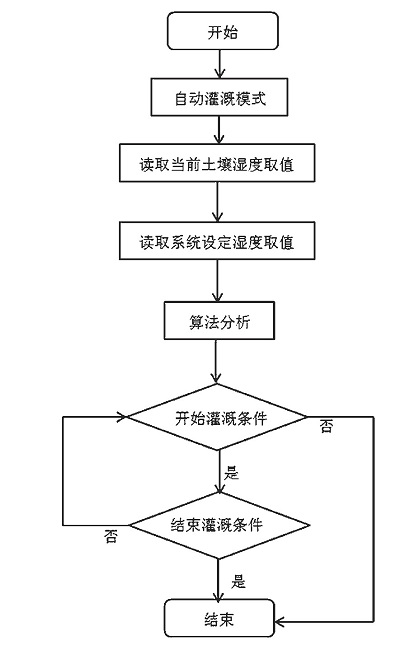
图3 自动灌溉模式流程图
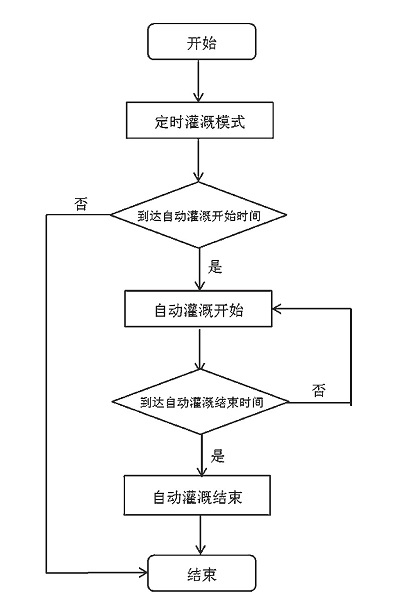
图4 定时灌溉模式流程图
4、结语
基于计算机辅助控制与PLC技术结合的农业智能化灌溉系统,促进了先进科学技术和传统农业灌溉系统的结合,满足了农业现代化灌溉的需求。在未来的实践探索过程中,还应结合农业智能灌溉系统运行实际,不断提高计算机辅助控制与PLC控制技术在农业灌溉模式中的应用水平,使这项技术在农业生产中发挥更大的应用价值。
参考文献
[1]崔天时,杨广林,刘磊,等。基于模糊控制的温室灌溉控制系统的研究[J].农机化研究,2010,32(3):84-86.
[2]王智乾,柯建宏。基于PLC模糊控制的温室灌溉控制策略研究[J].浙江农业科学,2011(6):1428-1432.
[3]赵德奇。基于PLC的现代农业温室灌溉系统设计[J].农机使用与维修,2013(9):17-18.
[4]韩贵黎,蔡宗慧。基于PLC和物联网感应的智能灌溉节水系统设计[J].农机化研究,2017(12):215-218,263.
[5]靳瑞生,裴瑞婷。基于PLC的植物灌溉控制系统设计[J].电子技术与软件工程,2019(1):114.

为了提高盆栽绿植浇水的智能化,设计一款基于STM32的盆花自动浇水系统,该系统可以检测绿植生长环境的温湿度以及土壤湿度情况,当检测到环境参数值低于设定的阈值时,自动启动盆花浇水功能。...
在保证农作物产量的同时,如何实现精准节水灌溉成为人们重点关注的问题。通过单片机来实现对土壤湿度的实时测量可以有效准确判断灌溉农作物的时间,实现自动灌溉。...

本文设计的基于STC89C52的智能灌溉系统测量误差小、功能运行稳定、造价低、操作简单等特点,能满足农业农村作物生长灌溉控制要求。...
根据单片机设计的智能灌溉系统,利用温湿度传感器进行数据的采集,使用阀门控制水量,以及液晶显示屏进行数据的显示,最后通过LED灯和蜂鸣器实现相应的报警功能。...