农业工程论文

引言
变量施肥( Variable Rate Fertilization or VariableRate Application,简称 VRF 或者 VRA)技术作为精准农业重要内容之一,其“因地制宜”的技术思想充分体现了精准农业的精髓。
变量施肥的基本原理是根据土壤养分存在差异的特点,按照田间每一小耕作的田块(格网、操作单元)的具体需要,对肥料进行“变量投入”,根据土壤的养分进行施肥,力求在保证一定目标产量的情况下,充分利用原有土壤肥力,提高化肥利用效率,以实现降低投入、提高产出、减少污染及保护环境的目标。
变量施肥的方式有两种:一是处方信息控制施肥;二是实时控制施肥。本文所研究的是第 1 种施肥方式。该方式通过加载变量施肥处方图并读取相关的施肥信息,系统分析判断后,计算出恰当的施肥量,根据地块对肥料的要求,有针对性地撒施不同配方及不同量的肥料。
为了实现以上目标,本文就使用 eSupermap 控件和 C#编程语言如何实现变量施肥控制软件进行设计。
1 eSuperMap 控件的概述
eSuperMap 是一个可以进行二次开发的嵌入式地理信息系统(eMbedded GIS) 控件,既满足嵌入式设备,又具有强大的功能特点。该控件是由北京超图软件股份有限公司独立研发、根据实际情况专门为嵌入式设备量身定做的,满足了开发人员对嵌入式 GIS 开发和应用的要求。其在根据嵌入式设备硬件资源紧张的基础上,为了达到对资源的消耗低、功能强大、性能突出等目的,对数据结构和基本算法进行优化,做到以较少的资源换取较多的功能。
2 WinCE 系统的概述
WinCE 操作系统属于通用型的嵌入式操作系统,是一个开放的、可升级的 32 位嵌入式操作系统,是基于掌上型电脑类的电子设备操作系统。Windows Em-bedded CE 6. 0 重新设计的内核具有 32 000 个处理器的并发处理能力,每个处理有 2GB 虚拟内存寻址空间,同时还能保持系统的实时响应。这可以让嵌入式开发人员将更多功能强大的应用程序安装到更智能化、更复杂的设备中,它可以应用于手持 PDA、PcketPC、Smartphone、工业控制及医疗等。
在农业生产中,需要进行导航、辅助驾驶和变量施肥等操作,为满足农业生产的需要和适应复杂的工作环境,选择装有 WinCE 操作系统的车载计算机作为人机交互的终端。
3 软件平台
3. 1 软件开发平台
本文开发系统是在 Windows XP 操作系统下进行,以 VS2008(Microsoft Visual Studio 2008)为开发程序的 IDE(Integrated Development Environment,集成开发环境)。
VS2008 是微软公司针对在. NET 框架下的 IDE,可以在该环境开发 Windows 程序、Web 程序和智能设备的程序。该 环 境 支 持 Visual C# 、Visual Basic和 Visual C + + 编程语言。变量施肥控制软件现采用Visual C#进行实现。
Visual C#是微软为. NET Framewor 量身订做的程序语言,是微软公司在 2006 年发布的一种面向对象的编程语言。
3. 2 软件应用平台
软件应用平台设计遵循稳定性高、可扩展性好的原则,且具备一定的抗干扰能力和模块化标准。
嵌入式农机变量施肥控制软件的软件应用平台分别选用 AG332 型 GPS 接收机和车载计算机。
AG332 型接收机集成了 Ultimate Choice 技术和先进的高性能双频接收机,为用户提供各种差分服务方式和更好的精度。AG332 型接收机有以下几种精度:RTK 基准站差分精度为 + / - 2. 5cm,OmniSTARHP 高精度卫星差分精度为 + / - 5 ~ 10cm,OmniSTARXP 高精度卫星差分精度为 + / - 7 ~ 12cm,可以满足不同工作对各种精度的需求。同时,AG332 型 GPS 接收机还具有 RS232 接口,可以更好地进行通信。
车载计算机的硬件由主频为 1GHz 的 CortexA8ARM 嵌入式 CPU 及 512M DDR2 SDRAM 组成,操作系统是基于简体中文版 Windows CE6. 0 R3。该车载计算机功耗低、反应灵敏、运算速度快,可以在相对恶劣的环境下正常工作,同时还具有防雷击和过流保护等特性。
车载计算机具有丰富的对外接口,包括 2 路 RS -232 接口( 带隔离) 、1 路 RS - 485 接口( 带隔离) 、2 路USB 主口、1 路 USB 从口、1 路网络接口。这些接口可以支持该车载计算机适应更多的工作。
4 变量施肥功能的实现
在变量施肥控制软件中,使用 eSuperMap 控件可以将变量施肥处方图在嵌入式变量施肥控制软件中显示出来。使用 eSuperMap 的类库提供的函数,可以将 GPS 接收机接收到的经度和纬度信号转为相应的平面坐标 X 和 Y。这样就可以在变量施肥处方图上显示出当前农机作业的位置,并读取出该点的变量施肥数据,如变量施肥指令(VRT)和施肥量等信息。
eSuperMap 控件不但可以显示和读取变量施肥处方图的信息,还可以对变量施肥处方图进行如下操作:地图放大、地图缩小、自由缩放、光滑自由缩放、平移地图、光滑平移、点选地图、框选地图、整幅显示和刷新等。
eSuperMap 控件提供了丰富的类库资源,封装了多种函数方法,满足不同领域对 GIS 功能的要求,查找和调用函数方便、简单。使用 eSuperMap 控件进行嵌入式 GIS 的二次开发和应用非常便利和快捷,减少了二次开发的工作量和时间,同时还节约了二次开发的成本。
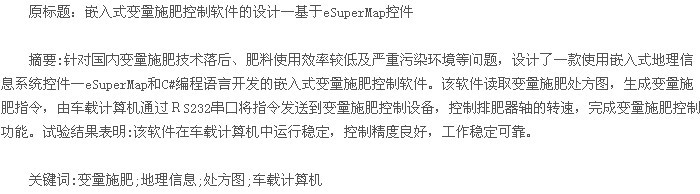
图 1 是变量施肥软件界面,图 2 是变量控制软件的程序流程图。【图2】
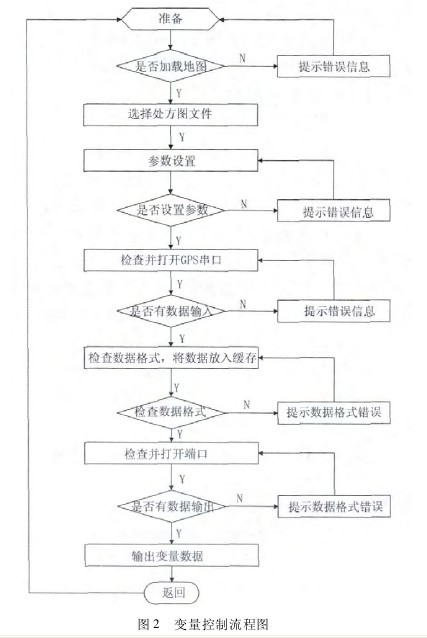
使用 eSuperMap 开发平台打开变量施肥处方图的部分代码如下:【公式】
5 软件应用试验
5. 1 试验基本情况
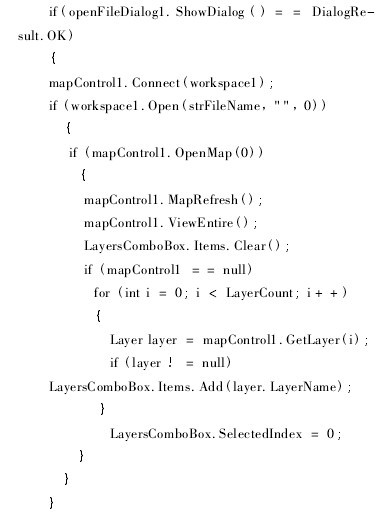
本次试验的目的是验证变量施肥控制软件的实际排肥量与设定排肥量是否在误差范围之内。试验地图选择的是黑龙江农垦试验农场地块处方图。为了使 GSP 的接收的精度更加准确,本次试验使用 RTK- GPS 差分基准站接收 GPS 数据。试验时,通过变量施肥控制软件将施肥机的排肥量设置为 360kg/hm2,变量范围为 ±20% 。
5. 2 试验结果
变量施肥控制软件根据 GPS 实时定位数据以及变量施肥处方图的基本信息,通过程序计算得出符合当前位置的施肥量的具体数值。由试验结果可知,程序运行正确。试验结果记录数据如表 1 所示。【表1】
5. 3 作业回放
嵌入式变量施肥软件具有作业回放功能,可以根据不同的作业时间读取数据库中存储的作业数据,加载相应的变量施肥处方图,查看作业信息路线,如图 3所示。6 结论该软件实现了使用 eSuperMap 控件实现变量施肥的功能。通过试验可知:该系统运行稳定,软件计算施肥量的变化范围满足设定要求和软件设计要求,为嵌入式变量施肥软件的进一步研究奠定了基础。
参考文献:
[1] 张书慧. 基于 GPS、GIS 的精确农业自动变量施肥理论与技术研究[D]. 长春:吉林大学,2003.
[2] 肖志刚,张曙光,么永强,等. 精确农业的现状及发展趋势的研究[J]. 河北农业大学学报,2003,26(S1):256 -259.
[3] 潘瑜春,赵春江. 地理信息技术在精准农业中的应用[J].农业工程学报,2003,19(4):1 -61.
[4] 王鹏,王熙. 基于 C#的嵌入式农机 GPS 辅助导航串口通信程序的设计[J]. 农机化研究,2013,35(9):78 -81.
[5] 陈立平,黄文倩,孟志军,等. 基于 CAN 总线的变量施肥控制器设计[J]. 农业机械学报,2008,39(8):101 -105.

一、引言土壤湿度在气象、水文等环境研究中作为最重要的特征参数之一,是影响全球气候的重要因素,而且土壤水分的研究对土壤能量平衡有着非常重要的意义。随着微波遥感技术的发展和应用,微波遥感已经在地表土壤水分研究领域逐渐蓬勃发展,成为重要的监测手段...
0引言杏鲍菇(PleurotusEryngii)又名刺芹侧耳,是一种集食用、药用、食疗于一体的珍稀食用菌品种,深受广大消费者的喜爱[1].近年来,我国多个省区引进了大型杏鲍菇周年工厂化项目,如宁夏彭阳县建立了以杏鲍菇、双孢菇为主的食用菌生产基地,杏鲍菇产业已成为当...
0、引言光照条件在各个生长期都是影响作物的生长的主要因素,当光照不能达到作物生长的最佳的光照要求时,就需要对作物的各个生长期进行补光。国际上补光光源通常选择红色和蓝色LED光源,可以做到高效节能,有些地区甚至完全用人工光源代替自然光源培养作物...
引言在籽棉的收购和加工环节,含水率(回潮率)是一个重要检测参数,为了准确采集棉花回潮率值,目前应用最为广泛的是电容法和电阻法。目前,国内外有许多学者研究农产品、果蔬等物料介电常数与含水率及其它因素之间的关系。郭文川、张立彬等专家学者应用农...
引言世界的水稻种植区域主要集中在亚洲,约占世界水稻种植面积的90%,产量接近粮食总产的50%。水稻是我国粮食种植面积最大、单产最高、总产最多的作物之一。催芽在水稻生产过程中起着决定性的作用,温度、水分和空气是水稻催芽过程中非常重要的条件。...
0、引言黑龙江省属于温带大陆性季风气候,是我国重要的粮食基地。黑龙江省的农业生产以农垦总局的大规模集约化生产为主,到2012年黑龙江省的水稻种植面积逾333.3万hm2。目前,黑龙江省农垦总局的水稻种植生产以工厂化、集约化模式进行,对水稻的浸种、育秧、种...
引言地下水是大自然赐予人类的宝贵资源,随着社会发展和科技进步,地下水资源已被过度地开发利用,不合理地开采地下水资源已经引起地下水水位下降和一系列的环境问题。例如,地面沉降引起建筑物的破坏;沿海地区过量开采地下水,造成海水入侵和倒灌;干旱地区...
引言现今已进入全面信息社会,信息农业的迅猛发展为传感器在农业方面的应用开拓了广阔的空间。在各种农作物的育苗、生产、收获、储藏与流通等环节,广泛使用各种传感器,使智能型传感器接口研究得到重视。不同类型的现场总线在功能、性能和价格等方面有很...
0、引言物联网是继计算机、互联网之后的第三代信息技术革命,引领着社会发展的潮流。WSN是物联网的关键的技术,它由部署在监测区域内大量廉价的、低功耗的、具有感知、通信和计算能力的小巧节点组成。WSN将最终成为联系物理世界和客观世界的接口,人们可以...
引言随着棉花采摘机械化程度的逐年提高,2012年新疆兵团机采棉种植面积已到33.3万hm2,跨区作业使得采用自动测产系统进行棉花产量监测已具有可行性和必要性。通过自动测产系统获得棉花产量数据的空间分布情况以指导变量作业,是实现棉花精准作业中至...