农业机械化论文


现阶段有关农业机械化投资行为与效益研究相对较少。基于这一研究现状,应采取行之有效的方法对农业机械化投资行为与效益进行分析研究。...

农业机械化,是生产方式的转变与进步,实现了由人畜力为主向机械作业为主的农业生产方式的转变,大大提高了农业生产效率,增强了我国农业生产的综合能力。笔者作为一名农机技术推广站的工作者,从事农机推广事业多年,总结了一定经验。笔者将主要通过以下几...

在党的十九大报告中, 习近平总书记提到乡村振兴战略, 他强调“三农”问题是全党工作的重中之重, 我们必须要加快实施振兴乡村的战略, 早日实现农村强起来、农业壮起来、农民富起来的美好愿景。...
一、我国农业机械现状(一)我国农业机械化作业现状改革开放30多年来,我国农业机械化取得了巨大成就:农机装备总量的不断增加,推动了农机化作业水平的不断提高,作业领域不断拓宽;小麦主产区基本实现了生产全过程机械化;水稻生产过程机械化发展势头正...

21世纪,随着计算机网络技术的发展,推动了整个社会不断地智能化、数据化发展。社会生活中的方方面面,已经越来越离不开电子信息技术的应用,同时也为我国的农业生产带来了一轮科技革命,推动了我国农业机械设备逐步向电子信息化发展。...

在文献查阅的基础上, 总结我国农机化现状, 提出了实现智能化、自动化, 是未来农业机械化发展的大趋所向, 要点性知识以供参考和借鉴。...

我国在农业方面的建设力度是非常大的, 为提高农业种植产业的生产质量和效率, 各地区政府在有意识地加强农业机械的推广和宣传。...
随着农业机械化水平的不断提高,在当前农业生产过程中对农业机械的需求量不断提升,在这种情况下,农业机械使用过程中的耗油量越来越受到大家的重视。特别是在当前我国油价涨幅速度不断提升的情况下,为了能够有效的降低农机作业时的成本,确保作业效益的提...

我国作为农业大国, 为促进农业发展、提高机械化水平、满足市场需求, 应用信息技术是必不可少的, 需要相关单位给予高度重视。...
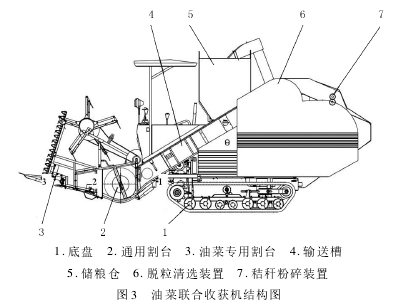
引言近年来,我市油菜种植面积一路攀升。油菜种植面积由2008年的21.33万hm2增加到现在的29.69万hm2,油菜总产量达40多万t,创造了我市油菜生产发展史上的一个个高峰。但我市油菜生产发展也存在问题。一是我市油菜生产基本还是一家一户的零散种植模式。即便农...