农业机械化论文

引言
钵苗移栽是温室穴盘育苗生产中的重要环节,人工作业单调繁重,正逐步被机械化移栽设备所取代。早期钵苗移栽设备的研究多以工业机器人为本体,其只适用于特定环境,不便于对系统进行扩展和改进,利用率较低。例如,Kutz 等人基于 Puma 560 设计的可将种苗从 392 孔穴盘移栽至 36 孔生长盘的苗圃植物移栽机器人; Ting 等人基于四自由度 ADEPT-SCARA 研制的一种带有 SNS 夹持器的移栽机器人等。近年来,荷兰、美国、韩国等国家又研制了多种用于温室作业生产线的大型钵苗移栽机,其作业效率达 800 ~ 1000 作业循环/h,最多可扩展 32 组移栽手爪。但其结构复杂、价格昂贵、体积大,与我国现阶段设施农业生产模式的适应性差。目前,邱立春、周婷、曹卫彬等人针对蔬菜钵苗自动移栽机也进行了相关研究并取得一定进展,但相对产业化应用要求仍存有诸多技术瓶颈需要突破。
为此,基于平动二自由度并联机构,设计了一种高速钵苗移栽机器人。基于该移栽机器人的系统构成和工作原理,应用 PLC、传感器和伺服控制技术对其控制系统进行设计,通过系统间的运动协调,实现钵苗从高密度盘到低密度盘的自动移栽。
1 钵苗移栽机器人结构组成及工作原理
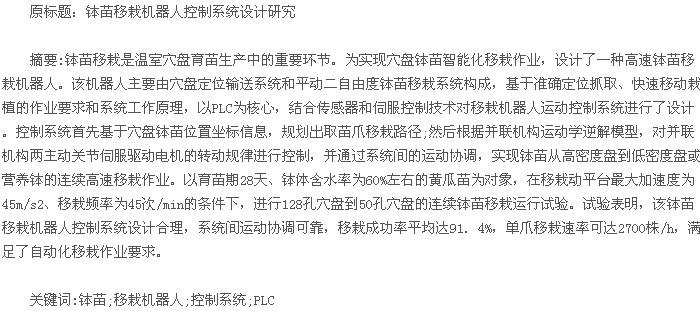
如图 1 所示,钵苗移栽机器人主要由平动二自由度并联移栽机构、气动四针式取苗爪、植苗盘输送带、供苗盘输送带、穴盘输送位置检测传感器、压盘辅助装置以及控制系统组成。
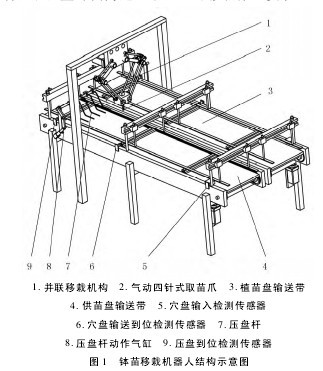
并联移栽机构由基座、移栽动平台及两条对称的全铰接运动支链组成,每条支链由主动臂﹑副主动臂和 3 个从动臂组成,如图 2 所示。由于主动臂与副动臂、3 根从动臂等长且平行,故可简化为如图 3 所示的2 自由度 5 杆铰接机构。图 3 中,L1、L2、ui和 wi( i =1,2) 表示支链中主动臂、从动臂的长度及单位矢量;θi1和 θi2分别表示支链中主动臂和从动臂的位置角; r= ( x,y)T表示动平台参考点 O'的位置矢量; e 表示两电机轴的偏心距。详细的运动学和动力学分析参见参考文献[11]。【图1-3】

工作时,安装在基座上的 2 个伺服电机经减速器分别驱动 2 个主动臂绕主动关节转动,主动臂带动从动臂,进而带动移栽动平台运动。由于主动臂和从动臂均由平行四边形构成,利用平行四边形的姿态保持性,使得两主动臂的独立转动转换为动平台的二维平动。气动四针式取苗爪安装在动平台上,用于夹取和放置钵苗; 而穴盘输送系统则垂直于移栽机构的工作平面独立布置,用于供苗盘和植苗盘的纵向间歇性进给。并联移栽机构的任务是通过与两条独立穴盘定位输送系统和气动取苗爪伸缩控制系统间的运动协调,将供苗盘中钵苗依次移栽到植苗盘相应穴孔中。
由于该移栽机构采用闭环并联结构,伺服电机安装在基座上,机构刚度大; 从动臂可制作成轻杆,运动质量小、惯性低,动平台可获得较高的速度和加速度,满足了穴盘钵苗高速﹑中短距的移栽作业要求。
2 钵苗移栽机器人控制原理分析
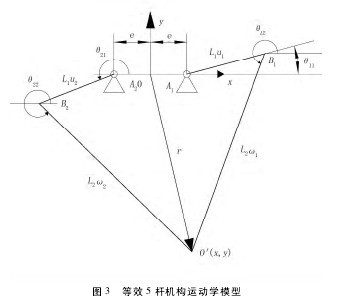
为满足准确定位抓取、高速移动栽植的钵苗移栽作业要求,取苗爪的工作模式设定为“定位—抓取—定位—移植”。具体工作原理如图 4 所示。【图4】
以基座上两电机轴中心连线的中点为原点,中心连线所在直线为 x 轴,垂直方向直线为 y 轴,建立坐标系。其中,x 轴为两电机的零点位置; 矩形 Q1Q2Q3Q4为并联移栽机构的工作区间。工作时,系统根据供、植苗盘内待移出和植入钵苗的穴孔位置信息,规划出气动取苗爪的移栽路径; 然后遵循特定的轨迹运动规律控制函数( 如 5 次多项式运动规律) ,对每段移栽轨迹进行 PVT 插补; 再应用平动二自由度并联机构的运动学逆解模型,将移栽动平台在工作区间内各插补点的位置 P( x,y) 、速度 v( vx,vy) 转换成并联移栽机构两主动关节相对于各自零位( x 轴) 的转角角度 θ( θ11,θ21) 和转角速度 ω( θ·11,θ·21) ,进而转换为两伺服电机的脉冲个数 n( n1,n2) 和脉冲频率 f( f1,f2) 。
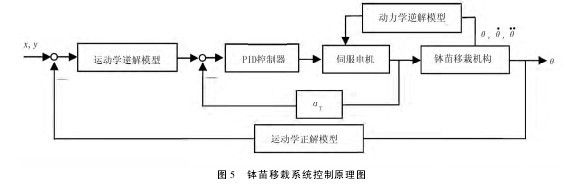
钵苗移栽系统采用伺服闭环控制,考虑机电耦合效应,可建立如图 5 所示的控制系统模型。该模型的系统输入为移栽动平台在工作区间中的理想设定轨迹 s( t) ,经运动学逆解模型转换为速度环的输入即理想角速度,通过 PID 控制器控制伺服电机,从而控制移栽机构的两主动关节输入。另一方面,移栽机构的机械部分通过本身的动力学特性反作用于伺服电机,从而影响其实际输出; 移栽机构两主动关节的实际输入经运动学正解模型得到动平台的实际轨迹 s'
( t) 再反馈回系统与理想轨迹进行比较。其中,αT为测速反馈系数。【图5】
3 控制系统设计
3. 1 硬件设计
由于并联移栽机构的工作区间轨迹是关节区间的非线性映射,工作时需要进行大量的正、逆解运算;整个系统需要 4 路高速脉冲输出,分别负责并联移栽机构的两主动关节输入和两条独立穴盘输送系统的动力输入; 此外,系统间还需进行高速通信。为此,控制核心选用信捷 XCC-32T-E/C 型高性能 PLC。其支持 5 路高速脉冲输出( 带两轴直线、圆弧插补功能) 和CAD 运动控制; 带有高速浮点数运算和 C 语言编辑功能块,处理速度为 0. 2μs; 采用 NPN 型晶体管输出,I/O 分配为 18 点 /14 点; 支持 MODBUS 通讯和 CAN 总线通讯。
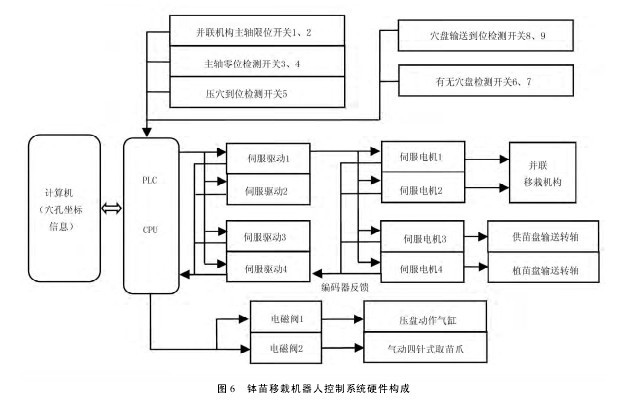
并联移栽机构两主动关节的动力输入选用松下A4 系列 MDDDT5540 型驱动器驱动的额定功率为1. 5kW 的中等惯量电机 MDMA152P1H。两条独立穴盘定位输送系统也均采用伺服闭环控制来实现穴盘的间歇性精确定量进给。上述伺服电机均带有增量式编码器以形成位置反馈。压盘杆动作气缸和取苗爪的伸缩运动分别选用 1 个二位三通式电磁阀和 1个二位五通式电磁阀来进行控制。此外,系统还需配有相应的传感器进行信号检测。并联移栽机构两主动臂的零点位置和极限位置,以及压杆压盘到位信号检测均选用电感式接近开关 LJ8A3-2-Z/BX,检测距离为 2mm; 供苗盘和植苗盘的输送到位信号检测选用松下透过型光电传感器 CX-411E+CX-411D,检测距离可达 10m; 有无穴盘信号检测采用松下回归反射型( 带偏极滤光器) 光电传感器 CX-491,检测距离达3m。所有传感器均为 NPN 输出。整个系统的硬件构成如图 6 所示。【图6】
3. 2 软件设计
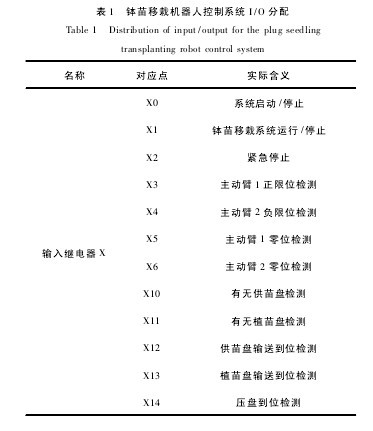
钵苗移栽机器人控制系统主要由高性能运动控制型 PLC、4 个交流伺服电机、1 个二位三通式电磁阀、1 个二位五通式电磁阀、5 个电感式接近开关和 4个光电传器等构成,共有 12 个输入信号和 10 个输出信号。其 I/O 点分配如表 1 所示。【表1】
移栽机器人在自动运行模式下的总体协调作业流程如图 7 所示。系统启动后,供苗盘、植苗盘开始输送; 与此同时,可启动钵苗移栽系统,并依次执行主电路上电、伺服使能打开和回零操作。待供苗盘、植苗盘均输送到工作位置,压盘动作气缸驱动压盘杆压好供苗盘,且移栽动平台回到零点位置时,气动四针式取苗爪复位( 张开回针) ,然后开始钵苗移栽作业并计数( 每完成 1 次钵苗移栽过程,计数器 C1、C2 便自动加 1) 。待取完 1 行时( C1 =N1) ,供苗盘进给 1 行,并将计数器 C1 清零,计数器 C11 加 1; 待植满 1 行时( C2=N2) ,植苗盘进给 1 行,并将计数器 C2 清零,计数器 C12 加 1; 待移完或植满 1 盘时( C11 =L1或 C12= L2) ,将对应的计数器 C11 或 C12 清零,并将新的供苗盘或植苗盘输送至移栽工作平面,进行下一穴盘的移植作业并计数。其中,N1和 N2分别为供苗盘和植苗盘的列数,L1和 L2分别为供苗盘和植苗盘的行数。【图7略】
作业过程中,供苗盘输送单元、植苗盘输送单元及钵苗移栽系统间通过并行程序结构实现各自的独立运行,同时将各系统的准备就绪信号( 如 M100、M101、M102 和 M103) 作为选择性分支条件,实现彼此间的信息交流,进而实现系统间的协调运行,确保钵苗移栽机器人的连续循环作业。4 结论本文基于平动二自由度并联机构,设计了一种高速钵苗移栽机器人。该机器人用以实现设施蔬菜、花卉类作物从高密度盘到低密度盘或营养钵的高速移栽; 根据钵苗移栽作业要求和系统工作原理,以 PLC为核心,集自编程序、传感器、伺服控制等技术为一体,对其控制系统进行了软硬件设计,实现了系统间的运动协调和自动化移栽。以育苗期为 28 天、钵体含水率为 60% 左右的黄瓜苗为对象,在移栽机构动平台最大加速度为 45m/s2、最高移栽频率 45 次/min下,进行 30 盘 128 孔穴盘到 50 孔穴盘的钵苗移栽连续运行试验。试验表明,该钵苗移栽机器人控制系统设计合理、系统间运动协调可靠,移栽成功率平均达91. 4% 以上,单爪移栽速率可达 2 700 株 / h,满足了自动化移栽作业要求。
参考文献:
[1] Kutz L J,Miles G E,Hammer P A,et al. Robotic trans-planting of bedding plants[J]. Transaction of the ASAE,1987,30( 3) : 586-590.
[2] Ting K C,Giacomelli G A,Shen S J,et al.Robot workcellfor transplanting of seedlings: part II - End-effector develop-ment[J]. Transactions of the ASAE,1990,33( 3) : 1013 -1017.
[3] Yang Y,Ting K. C,Giacomelli G A. Factors affecting per-formance of seedling - needles gripper during robotic trans-planting of seedlings[J]. Applied Engineering in Agricul-ture,1991,7( 4) : 493-498.
[4] 张丽华,邱立春,田素博. 穴盘苗自动移栽机的研究进展[J]. 农业科技与装备,2009( 5) : 28-31.
[5] 田素博,王荣华,邱立春. 温室穴盘苗自动移栽输送系统设计[J]. 沈阳农业大学学报,2009,40( 4) : 620-622.
[6] 刘凯,辜松. PLC 在穴盘苗移栽机器人控制系统中的应用[J]. 农机化研究,2009,31( 12) : 179-181.
[7] 高国华,韦康成. 自动化穴苗移栽机关键机构的模块化设计[J]. 机电工程,2012,29( 8) : 883-885.