农业机械化论文

农田灌溉是我国农业发展中重要的一项工程,灌溉需要大量的水资源和电能资源。截至2010年底,我国累计建成灌溉配套机电井501.2万眼,装机容量4321万kW。灌溉系统节水和灌溉水泵电机系统节能2方面综合考虑,才所谓真正的资源节约型农田灌溉系统。通过新的水力模型或制造技术提高水泵效率已几乎无可能,解决方法唯有通过优化系统配置来提高整体效率。变频调速技术应用于农田灌溉是农田灌溉节能技术的新方向,其主要优点是自动调节水泵转速满足流量、扬程要求,具有明显节能、满足随机取水、减少管理成本等优势。文献分析了灌溉系统变频的基本原理,通过试验得出节能率20%~69%。文献和以实地试验表明变频调速装置在不同灌溉方式下的节能效果显著,具有经济可行性。变频调速灌溉系统的仿真研究涉及较少,有学者对变频调速装置控制的恒压供水系统进行仿真,文献针对大型泵站综合自动化系统中水泵的变频调速进行了仿真实验,为变频调速灌溉系统仿真提供了一定的参考。
本研究拟从水泵变频调速节能原理入手,对引入变频装置的灌溉系统节能原理进行分析;构建系统各部分数学模型,通过仿真对系统的节能效果、变频调速的控制等进行相关研究。
1系统构成
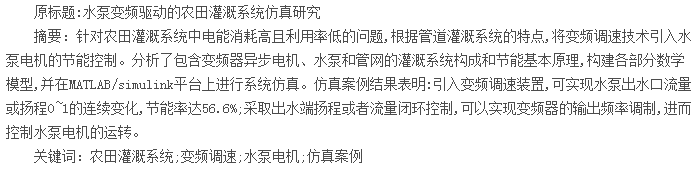
变频调速灌溉系统的特点是使用变频器驱动水泵(图1)。系统运行中,可以人为设定灌水器所需要的压力或流量,并与传感器检测后反馈至变频器的信号进行对比,自动改变水泵电机输入频率来改变电动机的转速,从而改变水泵的运行工况,使灌水器实际压力或流量维持在灌水所需的设定值。
2水泵变频调速节能原理
农田灌溉中,不同灌溉方式下灌水器对管网的扬程和流量的要求不同。常用的调节流量的方法有阀门控制法和转速控制法。传统调节流量的方法是阀门控制法,即恒定的转速下通过调节阀门开度的大小来调节流量,使得一部分能量被消耗在挡板上,水泵的工作效率降低,浪费了大量的电能。另外当改变出水口阀门开度大小时,必然出现超压或者欠压的状态。转速控制法则是在保持阀门开度不变的情况下,通过改变水泵转速来调节流量。
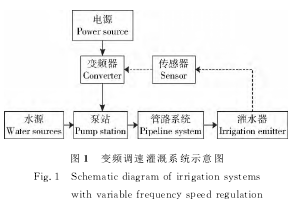
根据水泵的比例定律,即相似工况下,水泵运行在不同转速下的扬程、流量和泵消耗的功率分别与转速有以下比例关系
式中:n1和n2为2种运行工况下的转速,r/min;Q1和Q2分别为转速为n1和n2时的流量,m3/h;H1和H2分别为转为n1和n2时的扬程,m;P1和P2分别为转速n1和n2时的功率,kW。
采用变频调速驱动水泵电机时,可以调节水泵电机转速来获得灌溉系统变化后的所需扬程或流量,由式(3)可知水泵消耗的功率与转速呈三次方关系。阀门控制法只是调节阀门开度来改变管路系统的管阻特性来调节水泵的运行状态,由于其转速并没改变,因此水泵消耗的功率也不变,且阀门开度改变后水泵的运行效率也会随流量的减小而降低;转速控制时,功率与转速的三次方的比例变化关系使得水泵消耗功率随转速变化而较大幅度变化,而水泵的运行效率基本维持不变,水泵继续运转在尽高效率区间。当需要流量减小时,转速控制法具有明显的节能效果。此外,转速控制法可以根据不同灌溉系统的需求调节转速实现“恒压变量”和“恒量变压”模式运行。
传统的渠道轮灌灌溉模型中,多采用“定流量,变历时”方式,以某出水口是否出水,建立轮灌的0-1规划模型。本模型中,采用了管道输水和变频调速技术,可以调节转速来控制流量或压力在0~1之间连续变化,对精细灌溉、自动控制、节水节能有重要的意义。此外,电机的变频起动可以减少异步机起动大电流对电网的冲击,减少配电变压器容量,亦能节约电网投资成本。
3、系统仿真模型
3.1变频器异步电机简化模型
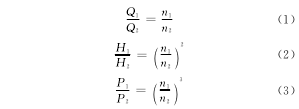
根据异步电机原理可知,当给定子绕组通以对称的三相交流电时,在气隙中可产生正比与三相交流电频率的同步旋转磁场,转子与磁场不同步时便切割磁感线,并产生感应电势。由于转子绕组短路,故有转子电流产生,该电流与同步旋转磁场相互作用,产生电磁转矩,从而驱动转子顺着同步旋转磁场的方向旋转。
在变频调速过程中,协调定子电压幅值E和频率f的比值为常数,从而维持气隙磁通恒定不变,E/f的改变仅仅改变气隙磁通的同步角速度ω1,因此变频器异步电机模型可以使用频率f1作为调速系统的输入量,输出量选转子角速度ω2。结合异步电磁转矩计算、电动机矢量图、系统拖动方程等可以推导出异步电机恒磁通变频调速系统模型(图2)[10,15-18]。
3.2水泵模型
水泵选择通用型离心水泵,其结构简单,适用范围广,操作维修方便,在农业和水利工程、给排水等领域得到了广泛的应用。其工作原理是在离心力的作用下,叶轮里的水以很高的速度被甩离叶轮,水经螺旋形扩散室后,沿着排水管路被压送到高处。
根据水泵的实际性能需要,水泵在额定转速下的扬程H与流量Q间的关系可由一元二次多项式表示[19-21]为H=K1+K2Q+K3Q2(4)式中:K1,K2,K3由水泵在额定转速下的性能曲线拟合得到,大量实际算例[22]表明K1>0,K2>0,K3<0。结合水泵的相似定律,将式(1)(2)(3)代入(4)可得任意转速n下的流量扬程关系H=K1N2+K2NQ+K3Q2(5)由式(5)可知,对于任何一台泵,只要转速和流量确定,其扬程亦为定值。输入转矩、扬程和流量是表征离心泵运行时输入、输出的重要参数。水泵由电动机旋转带动水泵旋转产生动能进行抽水,因此可用转速作为水泵模型输入。由式(1)(2)(3),以水泵的额定工况为参考,可建立离心泵仿真模型(图3)。
该模型可以反过来可以在已知所需扬程或流量时推算水泵应提供的转速。已知管网拓扑结构、管线参数和出水口所需压力时,即可计算得水泵
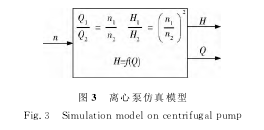
出水口应提供的压力,可由上述模型反向推导出电机应提供的转速,作为电机调速的参考值。
3.3管路系统数学模型
管道输水可以减少灌溉水的沿途损失,且供水速度快,是当今灌溉常用技术之一。管网的布置类型可以分为树状管网、环状管网和混合式管网3种。
根据水源位置、控制范围、地面坡度、田块形状、作物种植方向等条件,官网布置采用不同的管网布置,如“一字形”、“H形”、“L形”、“梳齿形”等。大规模的管网中,可以先对其管网结构进行简单基础单元分析,进而对由简单单元组成的复杂管网进行分析。
以树状管网为例,建立管网系统数学模型。
集中轮灌方式运行下各管道流量等于系统设计流量(水泵出水流量),出水口超过2个时,各级管道流量为

式中:Q为管道设计流量,m3/h;Nm为管道控制范围内同时开启的给水栓个数;N为全系统同时开启的给水栓个数。水头损失即扬程损失,包括沿程水头损失和局部水头损失。沿程水头损hf采用有压管道的勃拉休斯公式计算:

式中:f为沿程水头损失摩阻系数;m为流量指数;b为管径指数;L为管道长度,m;d为管道直径,m。局部水头损失一般以流速水头乘以局部水头损失系数来表示。管道的总局部水头损失等于管道上各局部水头损失之和,表示为

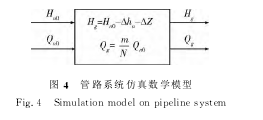
式中:hj为局部水头损失,m;ξ为局部水头损失系数,可由相关设计手册中查出;ν为断面平均流速,m/s;g为重力加速度,g=9.81m/s2。在实际工程设计中,为简化计算,总水头损失通常按沿程水头损失的10%~15%考虑,即Δh=(10%~15%)hf(9)求得管路扬程损失后,可以根据各个出水口的扬程需要求得水泵出水口对应提供的扬程Hn0(管网入口扬程)(10)式中:Δhn为管线总水头损失,m;ΔZ为设计控制点与管网入口地面高程差,m;Hg为设计控制点给水栓工作水头,m。
综上可建立管路系统的数学模型框图见图4。对于使用潜水泵或深井泵的井灌区,水泵扬程按式(11)计算Hp=Hn0+Hm+hp(11)式中:Hp为水泵扬程,m;Hm为机井动水位埋深,m;hp为水泵进出水管总水头损失,m。确定水泵扬程和流量需求后,就可以选择对应水泵型号和配套电机。
4、仿真试验
4.1仿真设计
基于以上各部分数学模型,选择在MATLAB/simulink平台上进行仿真,仿真流程见图5。
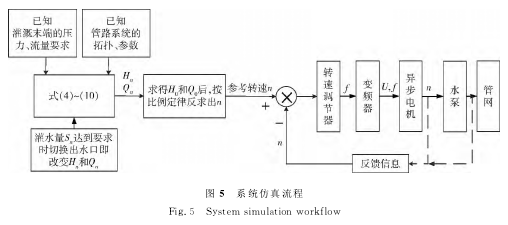
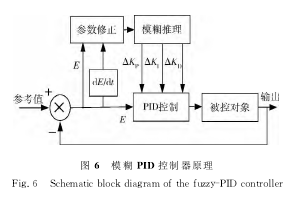
参考转速由管网和水泵模型结合计算后得出。转速调节器采用模糊PID控制器,是模糊技术与常规的PID算法的相结合的一种控制算法,结合后分别发挥各自的控制优势,使得动、静态性能都能得到很好的改善,即动态响应快、超调小、稳态误差小[7-9,23]。PID控制不具有自适应控制能力,使用模糊控制对PID参数进行在线修正,实现自适应控制能力。模糊PID控制器原理框图见图6。
由变频器、异步电机、管网和传感器组成的供水系统传递函数为

式中:K为系统的总增益;T为系统的惯性时间常数;τ为系统的滞后时间常数。系统的模型参数可以使用阶跃响应法测得。
反馈部分以转速采取闭环控制。转速的获得可以直接测得电动机转速或者管网末端的压力经计算变换后得出所需转速。严格来讲,应当使用管路各出水端的参数量(压力或流量)经压力或流量调节器后控制变频驱动系统,但大型农田系统中传感器数量的增加会使得技术经济性能不理想。因此,本系统仅仅在水泵出水端安装传感器,利用水泵扬程(或流量)和转速的关系,以转速控制变频驱动。转速调节器获得经过调整后的转速,转化为对应的同步频率,进而控制变频器,驱动异步电机水泵系统。
4.2仿真结果
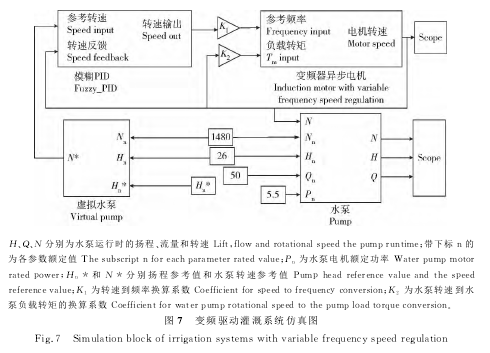
基于综上所述模型和仿真设计,在Simulink平台建立系统仿真模型如图7所示。
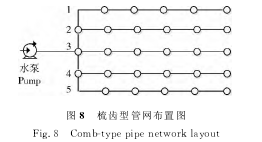
本例仿真试验管道系统设计为梳齿型典型管道布置(图8)。干管上每隔200m设置出水支管共5条,支管上每隔100m设置出水口进行灌溉。依据其良好的对称性,灌溉制度设计为分组轮灌,分为3组:1号轮灌组包含3号支管,2号轮灌组包含2和4号支管,3号轮灌组包含1和5号支管。各支管上出水口由距离水泵近到远依次编号为1至5,轮灌组内灌溉时,因其结构对称,对称点上的运行工况相同,故2号轮灌组和3号轮灌组中不同支管上相同编号的出水口可同时出水。
给定灌区参数为设计流量40m/h,选择UPVC管,经济流速1.5m/s,可确定管径为110mm,内径103.6mm,管道参数为:f=0.947×105,m=1.77,b=4.77。水力计算的控制点选择运行时最大的扬程出水口,即最不利灌水点。
1号和5号支管最末端为不利灌水点,该点正常工作时,管网入口设计压力按式(8)计算。局部水头损失取沿程水头损失的15%;ΔZ取0.5m;Hg取0.3m。可计算得管网入口扬程(即水泵出水口压力)为17.17m。水泵扬程按式(9)计算,Hm=3m;hp=2m,得所需水泵总扬程为22.17m。
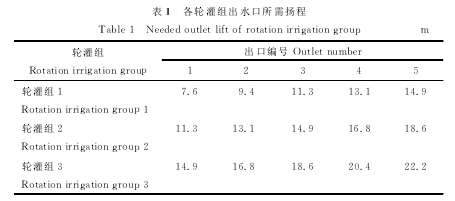
据以上计算的扬程和系统设计流量,选取水泵的类型为200QJ50-26/2型潜水泵,额定扬程26m,额定流量50m3/h,配套电机功率5.5kW。由式(5)~(10)可计算得各水口出水时水泵应提供的扬程见表1。
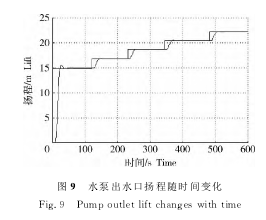
在农田灌系统系统仿真模型(图7)中以表1的扬程变化作为输入,观察系统的输出响应并进行功耗分析。以轮灌组3运行为例,各出水口扬程变化
如图9所示。依管网计算出的扬程作为参考输出进行输出调节,可以实现动态控制。其中阶跃曲线为输入参考扬程,参考扬程的变化表示管网出水口的改变。
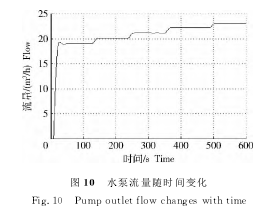
流量方面,图10为轮灌组3灌溉时各出水口的流量变化。随扬程的变化,出水口流量也变化。
测得出水口的水量达到预期目标时,可以进行出水口的切换,即对应切换参考输入扬程。轮灌组2和3运行时,因为有2条支管在出水,各支管流量为水泵出端流量的一半。
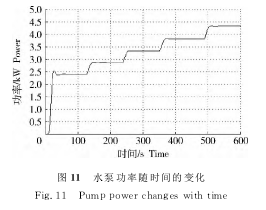
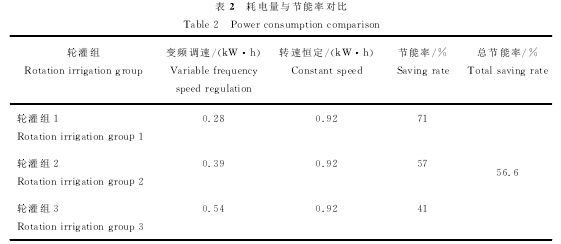
采用变频控制后水泵消耗的功率不再是恒定值,会随扬程大小而变化(图11)。鉴于本例中,管网所需最大扬程小于水泵额定值,因此变速运行时,水泵消耗功率始终小于额定值5.5kW。而转速固定时,水泵消耗的功率不变。变频调速法和转速恒定法运行情况下,固定仿真时间均为600s,3个轮灌组消耗的电能和节能率见表2。变频调速方法相对固定转速所节约的电能占转速固定情况下耗电能的比例即为节能率。
5、结束语
1)农田灌溉采用管道输水后,结合变频调速技术可以实现扬程或流量的控制,即根据管网和灌溉工作制度下出水口对流量或者压力的要求进行调节,实行闭环调节控制,以考虑管网拓扑结构的扬程或流量经转速调节器后对变频器进行控制,可实现出水口扬程或流量0~1(零至额定值)连续或浮点变化。
2)针对变频器、异步电机、水泵和管网组成的系统,本研究对水泵变频调速控制的农田灌溉系统各环节进行建模仿真,特别是将管道系统模型引入,使系统更为完备。文中单水泵多管道模型可为大规模复杂管道灌溉系统建模提供参考。
3)仿真案例结果表明,变频调速控制时,水泵运行更节能,总节能率达56.6%,对于大规模农田灌溉有明显的可预期经济效益。
参考文献:
[1]中国灌溉排水发展中心.2010年中国灌溉排水发展研究告[R].北京:中国灌溉排水发展中心,2011
[2]裴毅,田莉,杨晓珍,等.转速变化对离心泵性能的影响[J].排灌机械,2007,25(4):9-13
[3]武鹏林,张向东.节水灌溉系统变频控制的节能研究与应用[J].农业工程学报,2002,18(4):22-25
[4]李治勤,樊贵盛,郎旭东.变频调速技术在低压管道输水灌溉中的应用[J].农业工程学报,2003,19(2):89-92
[5]杜军顺.变频器在交口灌区泵站的应用与节能研究[D].西安:西安理工大学,2007[6]李巧红.基于PLC的恒压供水系统研究[J].中国科技信息,2008,20(31):57-59
[7]李红,郑颖,秦武轩.PID控制的泵供水系统仿真试验[J].排灌机械,2008,26(4):48-51
[8]王恺.基于模糊PID的恒压供水系统研究[D].淄博:山东理工大学,2009
[9]谢静.基于神经模糊PID混合控制的恒压供水系统[D].西安:西安科技大学,2011
[10]朱鹰屏.现代大型泵站综合自动化系统的关键技术研究[D].长沙:湖南大学,2005
[11]齐学义,李铁,冯俊豪,等.泵变频控制的节能原理及其系统分析[J].兰州理工大学学报,2006,32(3):53-55
[12]李治勤,解文艳,袁聆钊,等.两种变频方式在低压管道灌溉中节能效果分析[J].太原理工大学学报,2004,35(3):263-266
[13]宋松柏,吕宏兴.灌溉渠道轮灌配水优化模型与遗传算法求解[J].农业工程学报,2004,20(2):40-44
[14]吕宏兴,熊运章,汪志农.配水渠道轮灌组合优化模型与引水时间的均一化处理[J].中国农村水利水电,2000(1):46-48.
[15]孙铁成,郎永强,李冰,等.异步电动机简化模型的建模方法[J].控制工程,2003,23(z2):50-52.

在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...

农业节水灌溉自动化技术对农业发展具有明显优势,利用好灌溉技术有利于促进农作物更好的生长、提高水资源利用率、提高农作物产量。...