制药设备论文第八篇:药品分装设备电子凸轮中的编码器研究
摘要:药品分装设备不断更新升级,对其维修与维护的要求也不断提升。作为维修人员须了解设备的结构和工作原理,然后才能结合实际情况更快的发现问题解决问题。电子凸轮是分装设备中一个必不可少的机构,因此对电子凸轮的研究具有十分重要的意义。随着计算机技术和伺服控制技术迅速发展,电子凸轮在机械设备生产加工中越来越被广泛应用,是代替机械凸轮的一种智能化控制系统。它的应用使生产加工更加稳定,在速度、加速度、运动精度柔性输出方面优势明显且可被监测。电子凸轮的基本构成要素是旋转角度和往复的曲线运动;并且对这些运动的位置进行定位和反馈控制。
关键词:BOSCH分装线; 电子凸轮; SIN/COS编码器;
1 简易电子凸轮中的编码器
在BOSCH分装线(RRU3084/FLC3080)中,实现电子凸轮功能的系统包括编码器(绝对值编码器)、简易编程终端(CT10)和CamCon DC16、PLC、开关量元器件等。编码器负责旋转角度的信号输出,简易编程终端负责采集编码器信号、进行计算、转换为电平信号后输出,也可以进行简单编程,而PLC接收电平信号根据编辑的程序来控制开关量元器件(如洗瓶机喷头喷水、喷气的气动开关)。
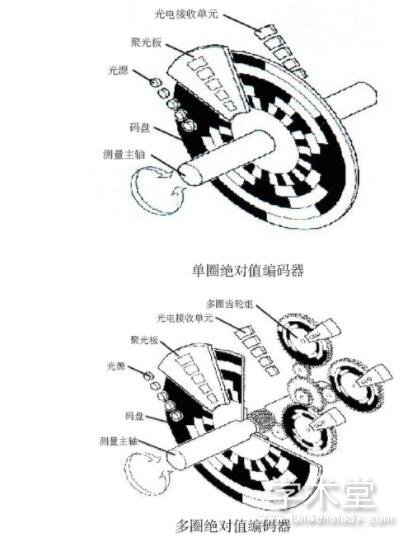
绝对值编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线……编排,因此在编码器的每一个位置上,通过读取每道刻线的通、暗,就会获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),称为n位绝对编码器。这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。绝对编码器上由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。因此,编码器的抗干扰性、数据的可靠性就会大大提高。
图1 绝对值编码盘
单圈绝对值编码器(图1上),在转动过程中测量光电码盘各道刻线,来获取唯一编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围在360度以内的测量,则称为单圈绝对值编码器。如果要测量旋转超过360度范围,就要用到多圈绝对值编码器(图1下)。编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,且无需记忆。多圈式绝对编码器另一个优点是测量范围大,在实际使用过程中往往富裕较多,所以在安装时就不必费劲找零点,将某一中间位置作为起始点就可以了,从而简化了安装调试难度。
这类编码器的特点是可多点连接控制,虽然编码器的成本比SSI成本略高,但连接电缆后续设备接口可以节省从而降低成本,只是其数据传输的速度很难提高。
BOSCH分装线使用的是德国DIGITRONIC公司的电子凸轮(CT16)配套简易编程显示终端(CT10)(图2左)。
图2 左为CT10、右为CamCon DC16
CamCon DC16(图2右)有多个通道,每个通道可以控制一组凸轮,但不能同时使用多个通道,通道之间相互调用,也可以对通道程序编辑、删除。
CamCon DC16收集到绝对值编码器的脉冲信号后进行计算,转换为PLC能识别的电平信号。
2 伺服电子凸轮中的编码器
电子凸轮的伺服实现要比上面提到的电子凸轮更为先进。但由于伺服电子凸轮的形式简单、使用方便、运行平稳、故障率低,所以维修人员对其了解不够。因此在其出现问题时分析故障原因不准确。
伺服电子凸轮中编码器的两种功能如下:
第一种:不在跟随情况下(伺服电机不跟随辅助编码器运转或者没有辅助编码器参与运转,用伺服控制器直接控制)。通常来说,这种情况相对简单,伺服控制器接收周期指令,伺服电机通过指令控制完成各类运动曲线,在控制系统中设置定时器,然后依据各种曲线设计出凸轮表,定时器中断时补充的计时值被作为凸轮表里的数据,每次在中断过程中发出一次指令,同时依据计时器的数据库在凸轮表中获取定时值修正定时器。这种情况下,重要的是怎样计算出凸轮表,以此来创建虚拟主轴。
第二种:在跟随情况下(加入了辅助编码器,主轴会与从轴同步联动)。相对于第一种情况来说,在跟随情况下的结构较复杂。关键步骤就是,依据各种曲线设计出的凸轮表,在控制系统中接收来自从轴编码器的信号后经过硬件或软件方式的判断确定轴的旋转方向,再通过系统里的自身计数器,索引凸轮表得出此次脉冲指令相应的要向伺服控制器传送多少个脉冲指令。当从轴匀速运动时与不在跟随情况下的状态并无太大差别,反之在从轴变速运动时便会使伺服电机的声音变大甚至成为噪音,电机温度升高;此种状况我们可以调节伺服驱动器的参数来进行优化。同样可以采用线数较高的编码器,并且在程序上采取倍频(常用的有2倍频、4倍频)。
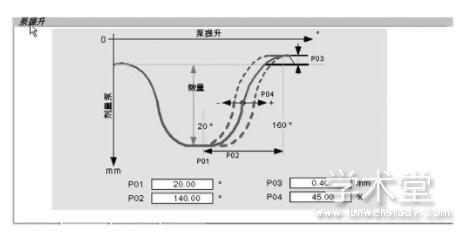
在BOSCH分装线(RRU3085/ALF4080)中,电子凸轮功能是由伺服电机通过伺服驱动器和伺服控制器控制形成的。伺服控制器根据电子凸轮曲线,使从轴和主轴实时位置同步,例如灌装机柱塞泵的提升运动曲线(图3)。
图3 BOSCH分装机泵提升曲线
伺服电机内部自带编码器,用来完成速度控制、转矩控制、机械位置的跟踪、定点停车。BOSCH分装设备的伺服电机里同时使用了增量型编码器和绝对型编码器,同时具备了这两种编码器的优点。首先,绝对位置值仅当设备通电并与控制器里的外部计数器通信时才产生,增量计数器在这绝对位置值基础上,对模拟量SIN/COS信号进行增量计数。绝对值编码器与上面介绍的一致,下面就简单分析SIN/COS编码器。
SIN/COS(正余弦)编码器基本类似增量式(相对式)编码器,两种编码器结构和原理类似,只是对信号的处理不同。增量式编码器优缺点明显,其主要缺点集中在提高编码器分辨率的同时还会缩短其传输距离;采用倍频技术提高编码器的分辨率又有很大的局限性;在脉冲速率较低时,无法连续输出信号。而SIN/COS编码器则添加了分辨率的静态方式,当分辨率处于静态时,依然会出现中间插值。由于正余弦编码器的控制模块可精准控制实际数值,因此,在闭环控制中广泛应用。SIN/COS编码器输出A、B两相互差值为90°电度角的脉冲信号,由此可方便地预判出编码器的旋转方向。同时,Z相指示脉冲信号可以作为参考零位,当码盘每旋转360°,Z相指示脉冲只发送一个指示信号。指示脉冲一般用来表示机械位置或者用来复位积累量。
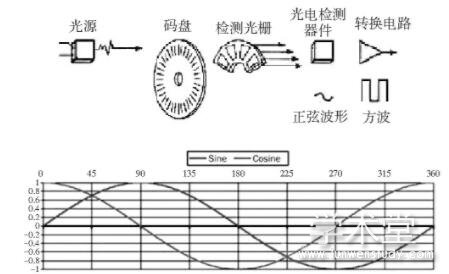
正余弦编码器主要组成部分有码盘、光源、光电检测器件、检测光栅和转换电路等。码盘上刻有相等距离的缝隙,缝隙形状承辐射状,且可透光。两个相邻缝隙之间表示一个增量周期;用于检测光栅上显示A、B两组透光缝隙,这两组透光缝隙与码盘相互对应,用以阻挡或者通过光电检测器件和光源之间的光线。A、B两组透光缝隙的相互距离和码盘上的节距相等,并且A、B两组透光缝隙相邻节距相差1/4,这样光电检测器件的输出信号会形成90°的相位差。当被测转轴转动时,码盘会跟随联动,此时,检测光栅静止,光电检测器件可以接收到穿过码盘和检测光栅上的透光缝隙照射过来的光,通过A和B通道光电检测器件能够输出正弦波和余弦波信号,其峰-峰值为1V或2V。转换电路可以将模拟信号进行计算和处理,以此得到被测轴的转角或速度信息。图4为SIN/COS编码器结构原理及信号波形图。
图4 编码器原理图及正余弦曲线
虽然正余弦周期数(物理分辨率)看上去也不是很高,但是在控制器或者驱动器中,通过编码器输入电路处理和计算,每个正余弦周期都可以通过反正切插值运算细分为很多步,从而达到很高的分辨率。
依据正余弦信号的实时幅值,依据Arctan计算,可以确认编码器此时此刻在这一个正弦和余弦周期内的具体位置,正弦与余弦信号的质量和模数AD转换的分辨率决定这个位置的准确性,任意正余弦的周期通常可以细化为212至214步。编码器本身的每圈正余弦周期数与细分步数的乘积,得出了每圈的分辨率,这个分辨率就是细分后正余弦编码器的每圈总分辨率。特别关注的是,细分后的分辨率,可通过输入电路的控制器或驱动器处理计算得出,而并非编码器直接输出。
SIN/COS编码器,有可能出现误差情况,产生误差的因素有谐波影响、传感器生产中有公差等原因、编码器发出的信号产生不稳定等。并且此类误差的偏移量是不可检测到的,当误差累积到一定量并产生错误现象时才可得知。
3 故障举例
3.1 故障一
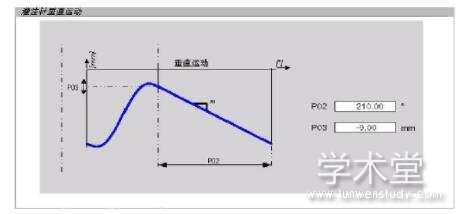
BOSCH灌装机在灌装时灌注针跳起,操作人员停机后发现灌注针在下落时会被瓶口顶起,转动灌注针使其能伸入瓶内,但旋转的位移量有限针头会与甁壁接触,灌装出来的制品在甁壁上有挂壁现象,导致药品灌装不合格。维修人员判断为针架错位,此处有两种解决方法。方法一是在针架下面有一个伺服电机带动齿轮和齿轮带来控制针架的运动,把齿轮的张紧螺栓松开后移动齿轮带,使灌注针处在瓶口中间位置,再把张紧螺栓上紧,故障解除。用这种方法虽然解决了问题,但只是手动处理了机械故障。方法二是当了解电子凸轮怎样运用于针架运动时,问题就变得简单了,伺服电子凸轮所用到的是正余弦编码器,其通过脉冲信号计算主轴准确位置,当设备出现位移或错位时可以通过显示屏上控制针架的电子凸轮图表(图5)中P03的数据调整针架的偏移量。
图5 BOSCH分装机灌注针架垂直运动曲线
3.2 故障二
BOSCH灌装机显示屏上报警提示为“转盘轨道倒瓶或少瓶”,导致进瓶锁关闭,设备无法正常运行,但转盘轨道上瓶子没有缺少或倒瓶现象。检查了探头的光纤没有松动,也没有其它报警引起这种情况。检查到电子凸轮开关图表(图6)时发现“进料倒瓶”选项处的数据不正常,一般情况下探头的有效探测角度是以伺服电子凸轮的虚拟主轴为基准来建立的,并从在适当的角度,这里说的适当角度是要人工调整的,角度太小会探不到瓶子,太大会导致倒瓶或少瓶时不报警。所以发现数据不正常,就是屏幕上显示探头角度太小,通过“编辑”按钮把角度改正到正常值后故障排除。
图6 BOSCH分装机凸轮开关界面
此处的“主轴位置”的主轴就是虚拟主轴,数控和伺服系统有主从轴的概念:主轴在运动时从轴会按特定比例与主轴联动。这中情况下只须发送命令给主轴,从轴就会通过设定好的比例自动与主轴联动。主轴可以通过电机连接传动,也可以不用连接电机。不用电机连接传动的主轴被称为“虚拟主轴”,虚拟主轴仅仅用来收集速度信息/位置数据/加速度指令,不存在实际的执行部件。但其仍然能够利用一定的比例关系使从轴得到控制。在运动控制系统中,有实轴与虚轴之分,实轴就像上面提到的有实际电机来传动,而虚拟主轴是在控制器中制定虚拟的存储值,其余的实轴作为从轴与虚拟主轴达到同步运算,虚拟轴作为运动系统的主轴,其优点在于不会有干扰和波动。
4 结束语
通常,简单的机械运动需求要使用复杂的机械结构组合完成,这给机械结构的设计及零部件的维护保养及维修都带来许多问题。而且传统的机械凸轮机构或多或少有一些机械性质的缺点,导致其在应用过程中有所限制,特别是当今加工工艺高速化及弹性较高的生产需求,将导致其不足之处越发突出。于是我们使用了电子凸轮,它不仅具有传统机械凸轮机构的优点,而且电子凸轮的使用使机器的控制精确度有了很大的飞跃,控制间距更长更远,故障率降低,可靠性提高;使机构的运动倍加灵活,使调试和维护保养变得简单。
参考文献
[1]魏军会,黄义萍.电子凸轮及其在自动化生产中的应用[J].淮北师范大学学报(自然科学版),2001,22(1):46-49.
[2]孙克军.常用传感器应用技术问答[M].北京:机械工业出版社,2009.
[3]娄宇翔.基于PLC与伺服系统控制的电子凸轮应用研究[D].大连:大连理工大学,2014.
[4]刘学鹏,郝晓红,张东升,等.电子凸轮控制器设计[J].四川兵工学报,2013,34(5).
点击查看>>制药设备论文(精选范文8篇)其他文章