硕士论文

摘要
智能汽车泊位优选和自动泊车研究泊车作为汽车驾驶环境中最为复杂的操作之一,也是长期困扰广大驾驶员,特别是新手驾驶员的难题,因此利用智能化技术实现自动泊车功能,使人类摆脱繁琐的驾驶操作,同时提升驾驶安全性,具有广泛的市场前景和现实意义。目前,对于自动泊车的研究已成为行业的热点,并取得了阶段性成果,但仍有许多问题有待解决,功能性能还存在着局限性,有待完善。
泊车位的选择是自动泊车系统的重要组成部分,目前的技术主要依赖停车场的诱导分配策略,而该策略往往很少考虑泊车过程中的动态障碍物信息,因此很难适应复杂动态变化的停车场环境。在泊车位分配规则上,现有的泊车位分配策略一般较少考虑泊车位属性选择的合理性,往往导致计算复杂化、泊位分配结果不尽合理。
本文提出了一种以车辆为主体的泊位优选策略。本文假定车辆通过网络、地图或相机与雷达等车载传感器获取了泊位选择所需信息,分析了影响泊位选择的几种因素;针对停车场的诱导分配策略较少考虑动态障碍物信息的问题,本文利用多段圆弧的预规划方法将障碍物对泊车难度的影响转化为轨迹安全域的大小,并依据阿克曼转向最终转化为前轮的转角裕度,以此作为新的属性考虑进泊位决策;针对挑选的决策属性,本文首先对属性信息进行了因子分析,排除了各属性间的相关关系,保证了后续决策的准确性;基于熵权法挖掘了各属性信息所反映的数据价值,并以此为各属性分配了权重;在评价各泊位优劣程度时,结合权重信息使用“理想点”解法决策出最优泊位;最终,本文设计了典型的停车场场景,验证了该策略对属性权重分配的合理性,泊位优选结果符合预期。
对于泊车运动控制,绝大多数研究都将泊车看作稳定的低速运动过程,基于这一假设,将车辆动力学模型简化为刚体稳态运动模型,忽略了车辆动态响应和侧向滑动,特别是忽略了车辆倒车的稳定性问题。这一方法在车辆稳定低速时取得了不错的效果,但对速度的适应性较弱。实际倒车入库过程车速并不稳定,存在车速变化;另一方面,在未来智能化技术普及之后,人类将更少地参与到泊车环境中,在条件允许的宽敞情况下,车辆可以适当提高车速,提升泊车效率,但车速稍做提高,车辆动态响应的稳定性便不可忽视。因此简单的稳态运动假设不能很好地适应相对高速或车速变化较大的场景,也不利于泊车过程中的车速控制。
因此,本文在上述考虑的基础上重新建立了泊车动力学模型,较多地反映了车辆倒车的动态响应,解决了相对高速下车辆泊车稳定性控制问题;本文首先通过类比正向行驶,建立了倒车单轨模型,充分比较了正逆向性行驶时车辆动力学的区别,分析得出了倒车时系统的不稳定性结论;利用状态反馈的控制方法将车辆横摆角速度和侧向速度反馈于前轮转角,将系统闭环极点纠正到负半轴,实现了车辆倒车的稳定性;闭环极点的调节也综合考虑了系统响应速度和车辆转向结构限制,最终使得系统不仅稳定,而且趋近实际车辆倒车时的运动特性,保证了车辆倒车轨迹跟随控制所需的系统动态稳定性。最后建立了基于倒车动力学模型的模型预测控制方法。本文将倒车动力学模型带入到模型预测控制,充分考虑了系统的动态特性,提高了泊车系统对车速的适应性,也提高了泊车系统的鲁棒性和平顺性,使得系统在提高车速后仍能保证较好的控制效果。
关键词:智能汽车,熵权法,泊车动力学模型,状态反馈,模型预测控制。
ABSTRACTR
esearch on Parking Space Selection andAutomatic Parking for Intelligent VehiclesParking is one of the most complicated yet difficult driving maneuvers, in particular,to many amateur drivers. Therefore, intelligent technology can be integrated into thevehicle control to realize the automatic parking function. That frees humans fromtedious driving tasks and improves driving safety, which has broad market prospectsand practical significance. At present, research on automatic parking has become ahotspot in the industry and has achieved staged results, but there are still limitations inthe research of some functions that need to be resolved.
Parking space selection is an important part of automatic parking fuction, the currentresearch mainly relies on the induced allocation strategy of parking lots. This strategydoes not take into account the dynamic obstacle information during the parking process,so it cannot adapt to complex and dynamic parking lots. In the study of berth allocationrules, the existing studies have not performed a rational analysis on the selectedattributes, It is very likely that there is a large correlation between the selected attributes,which not only complicates the calculation, but also increase the probability ofsuperimposing weights. That will make the berth allocation result unreasonable.
Therefore, a parking space selection model with vehicles as the main body wasproposed. This article assumes that vehicles use network information, map information,and on-board camera and radar detection information as the basis for berth selection,and extracts several factors that affect berth selection. Aiming at the problem that theparking lot's induced allocation strategy cannot consider the dynamic obstacleinformation, this paper uses a multi-arc pre-planning method to convert the impact ofobstacles on the difficulty of parking into the size of the trajectory safety region, andfinally converted into the corner margin of the front wheels according to the Ackermansteering, which was considered as a new attribute into the parking space selection. For the selected decision attribute, this article first performs a factor analysis on the attributeinformation, excluding the correlation between the attributes, and ensuring the accuracyof subsequent decisions. Based on the entropy weight method, the data value reflectedby each attribute information is mined, and assign weights to each attribute based onthis; When evaluating the merits of each berth, the best berth is determined based onthe "ideal point" solution combined whith the weight information; Finally, this paperdesigns a typical parking lot scenario and verifies the the model's rationality for attributeweight allocation, and the berth optimization results meet expectations.
For the research of parking motion control, most of the researches regard parking asa stable low-speed process. Based on this assumption, the vehicle model is simplifiedto rigid body motion, ignoring the vehicle's dynamic response and lateral sliding. Goodresults were obtained when the vehicle was stable at low speeds, but the adaptability tospeed was weak. The actual speed of reversing and entering the warehouse is not stable,and there is a change in speed. On the other hand, under the spacious conditions thatallow, especially after the popularization of intelligent technology in the future, humanswill participate less in the parking environment. Increasing the speed to improveparking efficiency, but if the speed is slightly increased, the dynamic response of thevehicle cannot be ignored. Therefore, the simple rigid body assumption cannot welladapt to changing vehicle speeds, nor can it provide convenience for vehicle speedcontrol during parking.
Therefore, this paper re-establishes the parking dynamics model. For the case wherethe parking control of vehicles was limited to low speed in the past, this article attemptsto increase the vehicle speed and amplify the dynamic response of the vehicle. Firstly,by analogy of forward driving, a reverse monorail model is established to fully comparethe difference of vehicle dynamics during forward and reverse driving. The conclusionof the instability of the system when reversing is obtained through analysis; the yawangular velocity and lateral velocity of the vehicle are fed back to the front wheelrotation angle using the state feedback method, and the closed-loop pole of the systemis corrected to the negative half-axis, which changes the stability of the vehicle; Theclosed-loop pole adjustment takes into account the system's response speed and vehiclesteering structure limitations, ultimately making the system not only stable, but alsocloser to the motion characteristics of the actual vehicle when reversing, ensuring thepremise that the system must be stable before vehicle control. Finally, a modelpredictive control method based on the reversing dynamics model is established. In thispaper, the reversing dynamics model is brought into the model predictive control, whichfully considers the dynamic characteristics of the system; The discrete reversingdynamics model at different vehicle speeds improves the adaptability of the systemcontrol to the vehicle speed; Based on the robustness and peace of the model predictivecontrol Compliance, the system can still ensure better control results after increasingthe vehicle speed.
Keywords:Intelligent Vehicle, Entropy Weight Method, Parking Kinetic model, State Feedback,Model Predictive Control.
目 录
摘 要 ................................................... I
ABSTRACT ............................................... III
目 录 ................................................. VII
第 1 章 绪论 .............................................. 1
1.1 课题研究背景 ....................................... 1
1.2 自动泊车功能组成 ................................... 3
1.3 自动泊车国内外研究现状 ............................. 4
1.3.1 自动泊车的市场应用现状 .......................... 4
1.3.2 泊位选择研究现状 ................................ 5
1.3.3 自动泊车路径规划研究现状 ........................ 8
1.3.4 自动泊车运动控制研究现状 ........................ 8
1.3.4.1 基于人工智能的运动控制方法 .................. 9
1.3.4.2 基于路径规划与路径跟随控制结合的方式 ........ 9
1.4 本文研究内容 ...................................... 12
1.4.1 本文研究重点问题 ............................... 12
1.4.2 本文工作内容和章节安排 ......................... 12
第 2 章 泊车位优选模型 ................................... 15
2.1 泊车位选择的影响因素 ............................. 16
2.2 泊位“有效性”判定 ............................... 19
2.3 泊位因素的“因子分析” ........................... 20
2.3.1 引言 ........................................... 20
2.3.2 KMO 检验 ...................................... 21
2.3.3 “因子分析”一般步骤 .......................... 22
2.4 基于信息熵的多属性权重分配 ....................... 25
2.4.1 准备知识 ....................................... 26
2.4.1.1 信息熵 ..................................... 26
2.4.1.2 熵权法具体步骤 ............................. 26
2.4.1.3.基于灰色关联度的最优方案选择 ............... 28
2.5 本章小结 ......................................... 29
第 3 章 自动泊车轨迹规划 ................................. 31
3.1 基于多段圆弧的轨迹安全域的确定 ..................... 31
3.1.1 确定轨迹上边界 ................................. 32
3.1.2 确定轨迹下边界 ................................. 33
3.1.3 坐标系转换 ..................................... 35
3.2 最优轨迹获取 ..................................... 35
3.2.1 最优轨迹影响因素 .............................. 36
3.2.2 最优轨迹确定 .................................. 37
3.3 本章小结 ......................................... 37
第 4 章 基于泊车动力学建模的运动控制 ..................... 39
4.1 基于“单轨模型”的泊车稳定性分析 .................. 40
4.1.1 正逆向行驶动力学区别 .......................... 40
4.1.2 二自由度模型假设 .............................. 41
4.1.3 车辆运动加速度分析 ............................ 42
4.1.4 单轨模型倒车稳定性分析 ........................ 43
4.2 基于状态反馈的改变系统稳定性 ..................... 46
4.2.1 反馈后状态空间表达式 .......................... 46
4.2.2 最优反馈矩阵的确定 ............................ 47
4.2.3 最优反馈目标函数 .............................. 50
4.2.4 反馈后系统动态响应 ............................ 51
4.3 基于泊车动力学模型的运动控制 ..................... 53
4.3.1 MPC 基本原理 ................................... 53
4.3.2 MPC 基本步骤 ................................... 53
4.4.3 mpc 仿真验证 ................................... 57
4.4 本章小结 ......................................... 60
第 5 章 仿真验证 ......................................... 61
5.1 实验平台介绍 ...................................... 61
5.2 泊位优选模型仿真验证实验 .......................... 63
5.3 自动泊车模型仿真实验 .............................. 69
5.3.1 PanoSim 场景设计 ............................... 69
5.3.2 自动泊车控制算法设计 ........................... 71
5.3.3 自动泊车仿真结果 ............................... 73
5.4 本章小结 .......................................... 77
第 6 章 全文总结与展望 ................................... 79
6.1 本文研究内容总结 .................................. 79
6.2 未来工作展望 ....................................... 80
参考文献 ................................................ 81
作者简介 ................................................ 89
致谢 .................................................... 91
第一章 绪论
1.1 课题研究背景
随着经济社会的不断发展,人民生活水平的不断提升,汽车已然成为人类出行必不可少的伙伴。截止到 2020 年 1 月,中国汽车保有量高达 2.6 亿辆,个别城市达到了 300 万辆,机动车驾驶员多达 3.97 亿[1],汽车保有量的增多使得原来的马路、小区、街道等区域变得异常拥挤,用于泊车的空间也变得更狭小,寻找合适的泊位就变得很困难;另一方面,汽车驾驶员数量以每年千万级的数量增长,而驾驶经验的不足又使得新手在泊车入位时尤为困难,不仅浪费了大量时间、甚至造成剐蹭和碰撞等安全问题。Paul Green 经过分析交通事故数据库发现,跟泊车相关的事故占各类事故的 44%,其中有 60%左右是倒车中的碰撞事故,如下表 1.1 和 1.2 所示[2]。在倒车入库的过程中,经验的缺失使得驾驶员无法规划出合适的路线;视野的不足也使得驾驶员无法获取完整的车身周围环境,天气和光线等因素又使得后视镜的效果无法保证,增加了碰撞的风险;以上因素促使的紧张情绪又使得部分驾驶员无法连贯的操纵方向盘离合与刹车,车辆就无法按照预想的轨迹泊车入位。
表 1.1 据车辆动作统计事故资料

表 1.2 车过程中事故统计资料

表 1.3 密歇根市泊车相关事故统计资料

在社会飞速发展的今天,人类除了将各种简单但繁琐的工作都交给机器来处理外,也期望机器能够学习人类成熟的技能自主地完成各种复杂的任务。以智能化技术为依托的机器平台开始进入人们的视野中,帮助人类准确高效的完成困难的任务,减少人类单独操作时出错的可能。随着智能化技术在移动机器人方面应用的成功,人们将视野投向了更高难度的自动驾驶,而泊车场景恰是自动驾驶中最复杂的场景之一,也是困扰广大新手的难题之一。因此将智能化技术融入车辆功能之中,实现自动泊车功能,使人类摆脱繁琐的驾驶行为,提升驾驶安全性,是具有广泛的市场前景和现实意义的。

图 1.1 垂直泊位入库 图 1.2 侧方泊位入库
1.2 自动泊车功能组成
自动泊车作为自动驾驶技术应用的重要场景之一,为车辆到达目的地之后自主搜寻并选择合适的停车位,最终完成泊车入位。因此自动泊车主要包含以下四个方面:
1) 泊车位搜寻 。
一般的泊位搜寻是车辆基于自身传感器,比如超声波雷达、毫米波雷达、激光雷达或是视觉相机,对车辆的周遭环境进行识别,寻找到可用车位,同时对车位角点、泊位中心线和周遭障碍物进行标识,方便后续确定泊车可用空间。
2) 泊车位选择 。
在所有给出的停车空间中剔除无效停车位(被障碍物阻挡,实际不可到达),综合所有可信信息,在其余车位中选择合适车位作为目标停车位。本文假定泊车位选择的信息来源可以是通过网络(获取停车场的空位信息),还可以是通过车辆自身的传感器。
3) 路径规划:
路径规划指的是在确定停车位后,考虑位姿信息和障碍物限制,规划出一条符合车辆运动规律的的路径用于指引车辆运动。
4) 运动控制合理利用控制算法控制使得车辆按照规划路径移动。
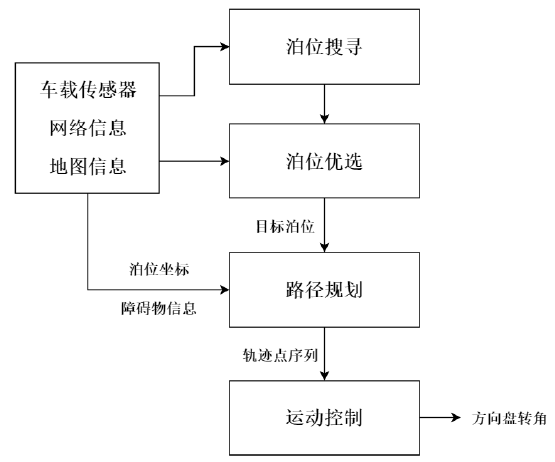
图 1.3 自动泊车架构图 。
1.3 自动泊车国内外研究现状
1.3.1 自动泊车的市场应用现状 。
自动泊车系统(APS)最早出现是在 1992 年,大众公司试运行在其概念车 IRVwFutum 上,该系统搭载于一整台电脑,体型庞大,成本较高,运算速率很慢,故而没有投入量产[3]。
2003 年,丰田公司趁着电动技术的成熟,在其油电混合车型 Prius 上搭载了一款泊车辅助系统。该系统基于车后方的 CCD 相机获取车位信息,基于初始相对位姿规划路径,由车辆电控系统控制方向盘完成倒车,但在系统运行中并不控制车速,需要驾驶员参与控制刹车。而且该辅助泊车系统只配有垂直方位的倒车入库模式,无法完成对侧方位和斜方位的泊位的引导,存在比较大的局限性[4]。
2005 年,雪铁龙推出其泊车辅助系统。2007 年,雪铁龙公司与博世集团合作,引入其定位测量系统,在其 C4 车型上车辆四周加装了6个雷达测距传感器,配以成熟的电控系统,形成了一套比较完备的自动泊车辅助系统。该系统具备泊位搜寻功能,在行进过程中可自动探测泊位空间大小,用以决策泊位有效性;在倒车过程中可探测障碍物,有效防止车辆发生碰撞。
第一章 绪论 。
2007 年,丰田公司在其高端品牌雷克萨斯上推出了智能泊车辅助系统。这套系统依靠超声波传感器检测泊车位,并辅以摄像头识别泊位角点和泊位中心线。
但系统仍需要人为参与决策是否进入当前泊位,并控制档位,在倒车过程中方向盘由电控系统控制而车速和环境安全性依然需要驾驶员来保证。
国产汽车近些年逐渐开始在中高档汽车上搭载泊车辅助系统,如福克斯、科鲁兹和吉利博瑞等高配版车型。如今完全不需要人为参与的全自动泊车系统还处在研发阶段,只在极少数高端车型上搭载有试验版,功能尚有局限,有待实践的检验。而有关于自动泊车的研究如今正是热点,以百度为代表的互联网企业和各类初创企业取得了长足的进步。
2018 年,百度基于 Apollo 平台,在重庆的自动驾驶园区内实现了共享汽车的自动泊车试验,该共享汽车搭载了 6 个摄像头和 12 个超声波雷达用以探测周围环境,检测行人和障碍物,具备自主搜寻泊位、自主导航、自动泊车入位和自动还车的功能。初步解决了百度提出的“最后一公里自由”的目标。
2019 年 7 月,初创公司 Momenta 推出其自动泊车解决方案 Mpilot Parking。
该系统需要用户在手机端主动选择泊车位,之后车辆将自动规划路径,引导车辆到达目标点并完成泊车入位。Mpilot Parking 依托 Momenta 公司强大的高精度地图和视觉处理算法,在车身四周布置了多种传感器,包括相机、鱼眼相机、超声波雷达、惯性 IMU 和 GPS,能在车辆行进的过程中准确识别行人、障碍物和车位,并执行等待或避让操作[5]。

图 1.3 选择泊位 图 1.4 视觉检测1.3.2 泊位选择研究现状
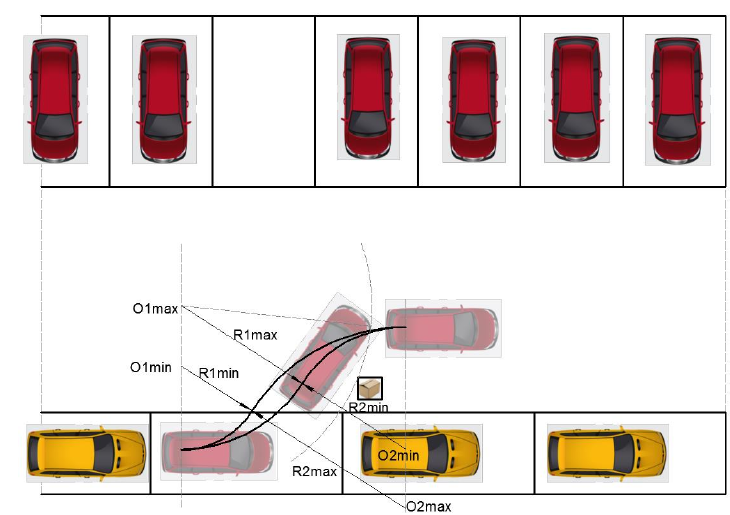
图 2.4 障碍物对泊车影响
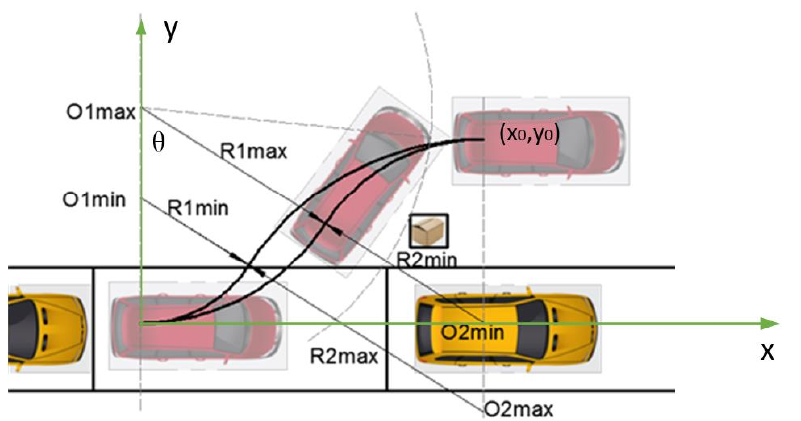
图 3.1 泊车轨迹安全域

图 3.2 倒车几何轨迹图

图 4.1 模型预测控制架构图
表 4.4 模型系统矩阵按车速离散表

…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第六章 全文总结与展望。
6.1 本文研究内容总结。
自动泊车作为智能汽车无人驾驶的重要一环,最能体现无人驾驶的技术难度与魅力,是广大新手驾驶员最渴望车辆具有的功能之一,也是目前各科技公司优先考虑落地实现的无人驾驶项目,具有广泛现实意义。目前的研究主要集中在自动泊车的路径规划和车辆低速运动控制中,考虑到不同停车场环境下对泊车车速的不同要求,本文提出基于倒车动力学建模的运动控制方法使得车辆运动控制不局限于低速;对于泊位选择的研究目前主要依赖于停车场的诱导分配策略,无法适应动态变化的停车场环境,本文提出了一种以车辆为主体的泊位优选模型,利用车载传感器将动态障碍物考虑进泊位优选策略中,提高模型选择的合理性。本文的主要研究内容如下:
第一,提出了一种以车辆为主体的泊位优选模型。本文假定车辆以网络信息、地图信息和车载相机与雷达的探测信息作为泊位选择的依据,提取了影响泊位选择的几种因素;针对停车场的诱导分配策略无法考虑动态障碍物信息的问题,本文利用多段圆弧的预规划方法将障碍物对泊车难度的影响转化为轨迹安全域的大小,并依据阿克曼转向最终转化为前轮的转角裕度,以此作为新的属性考虑进泊位决策之中;针对挑选的决策属性,本文首先对属性信息进行了因子分析,排除了各属性间的相关关系,保证了后续决策的准确性;基于熵权法挖掘了各属性信息所反映的数据价值,并以此为各属性分配了权重;在评价各泊位优劣程度时,结合权重信息综合比较了各泊位与理想泊位的接近度和与负理想泊位的背离度来决策出最优泊位;最终,本文设计了典型的停车场场景,验证了该模型对属性权重分配的合理性,泊位优选结果符合预期。
第二,为车辆泊车入位完成动态路径规划。本文首先基于多段圆弧方法的预规划方法,圈出了泊车可行驶安全域,在这一过程中考虑了泊位角点或障碍物的限制;之后综合考虑轨迹曲率和控制可调节裕度设计了合理的评价函数,从泊车可行驶安全域中挑选出了最优轨迹。
第三,建立了倒车动力学模型。对于以往车辆泊车控制局限于低速的情况,吉林大学硕士学位论文80本文尝试提高车速,放大车辆的动态响应;首先通过类比正向行驶,建立了倒车单轨模型,充分比较了正逆向性行驶时车辆动力学的区别,分析得出了倒车时系统的不稳定性结论;利用状态反馈的方法将车辆横摆角速度和侧向速度反馈于前轮转角,将系统闭环极点纠正到负半轴,改变了车辆的稳定性;闭环极点的调节综合考虑了系统响应速度和车辆转向结构限制,最终使得系统不仅稳定,而且契合实际车辆低速稳定而高速失稳的特性,保证了在车辆控制之前系统必须保证稳定的前提。
第四,建立了基于倒车动力学模型的模型预测控制方法。本文将倒车动力学模型带入到模型预测控制,充分考虑了系统的动态特性;通过不同车速下离散倒车动力学模型,提高了系统控制对车速的适应性;基于模型预测控制的鲁棒性和稳定性,使得系统在提高车速后仍能保证较好的控制效果。
6.2 未来工作展望。
本文所提出的泊位优选模型和运动控制方法取得了一定的效果,但自动泊车是一个复杂多变的场景,对此,本文的研究还存在着如下不足。
1) 为泊位属性分配权重时,信息熵只考虑了数据所反映的价值,并没有考虑到各属性对于车辆和驾驶员本身的主观重要性,使得在数据在发生变化时,模型选择结果与主观选择有时并不相同,只是主观选择的次优选。后续可以考虑将主观权重分配与客观分配相结合,使得主客观选择趋于一致。
2) 本文泊车路径规划采用多段圆弧的方式,只保证了将泊位依赖空间缩小,但存在曲率跳变点,使得泊车中途车速存在较大的波动,不利于泊车连贯性。后续在设计评价函数时,可以考虑将曲率变化率这一因素考虑进去,在泊车可行驶安全域宽裕的情况下可以选择一条曲率及其变化率都柔和的路线。
3) 本文在运动控制中着重研究了侧向运动,对于纵向车速控制只是利用简单反馈控制保持匀速,然而实际倒车时,在方向盘回转点处附近应该适当减速给车辆足够的反应时间防止车辆出现偏离,后续考虑加入速度设计,在方向盘变化率超过一定阈值时予以减速,使得车辆整体控制效果更加平滑顺畅。
参考文献
[1] 钟叔驾道. 全国私家车保有量数据:保有量 2.6 亿,驾驶人 3.97 亿 [N/OL].https://3g.163.com/auto/article/F40DNLG30527DJJ0.html.
[2] Paul G.Parking crashes and parking assistance system design:Evidence from crash databases,the literature,and insurance agentinterviews[C]∥SAE World Congress,2006:1685-1697.
[3] 左培文, 孟庆阔, 李育贤. 自动泊车系统发展现状及前景分析[J]. 上海汽车, 2017(2):44-46.
[4] 吴锴. 智能自动泊车系统研究[D]. 南京理工大学, 2008.
[5] 潘梓春. Momenta Mpilot Parking 方案亮相:复杂场景、高精地图与极致车端[N/OL]. 车云网, 2019-07-19 [2020-02-20]http://www.cheyun.com/content/29027[6] Cassady C R , Kobza J E . A Probabilistic Approach to EvaluateStrategies for Selecting a Parking Space[J]. Transportation Science,1998, 32(1):30-42.
[7] Young W . PARKSIM/1: a network model for parking facility design[J].Traffic Engineering and Control, 1986, 27(12):606-613.
[8] Waerden P V D , Oppewal H , Timmermans H . Adaptive choice behaviourof motorists in congested shopping centre parking lots[J].Transportation, 1993, 20(4):395-408.
[9] 季彦婕, 王炜, 邓卫. 停车场内部泊车行为特性分析及最优泊位选择模型[J]. 东南大学学报(自然科学版), 2009(02):215-219.
[10] Leephakpreeda T . Car-parking guidance with fuzzy knowledge-baseddecision making[J]. Building and Environment, 2007, 42(2):803-809.
[11] 张洋 , 魏连雨 . 基于模糊理论的停车诱导决策方法研究 [J]. 交通标准化,2011,(16):144-147. DOI:10.3869/j.issn.1002-4786.2011.16.039.
[12] Hirotugu Akaike. Factor analysis and AIC[J]. Psychometrika, 1987,52(3):317-332.
[13] BarbaraPrice. A First Course in Factor Analysis[J]. Technometrics,1993, 35(4):1.
[14] 林 海 明 . 因 子 分 析 模 型 的 改 进 与 应 用 [J]. 数 理 统 计 与 管 理 ,2009,28(6):998-1012.
[15] Ledyard Tucker, Charles Lewis. A reliability coefficient formaximum likelihood factor analysis[J]. Psychometrika, 1973, 38. 吉林大学硕士学位论文82[16] WANG Chunxiang,ZHANG Hengrun,YANG Ming,et al.Automatic ParkingBased on a Bird’s Eye View Vision System[J]. Advances in MechanicalEngineering,2014 (2014) :847406.[17] Choi, Sungwoo, Boussard, Clément, Novel, Brigitte. Easy PathPlanning and Robust Control for Automatic Parallel Parking[J]. IFACProceedings Volumes, 44(1):656-661.
[18] REEDS,JAMES,LAWRENCE S. Optimal Paths for a Car that Goes BothForwards and Backwards[J]. Pacific Journal of Mathematics,1900,145(2) :367 -393.[19] Zhang S , Simkani M , Zadeh M H . Automatic Vehicle ParallelParking Design Using Fifth Degree Polynomial Path Planning[C]//Proceedings of the 74th IEEE Vehicular Technology Conference, VTCFall 2011, 5-8 September 2011, San Francisco, CA, USA. IEEE, 2011.
[20] Chen C H, Hsu C W, Yao C C. A novel design for full automaticparking system. In:Proceedings of the 12th International Conferenceon ITS Telecommunications. Taipei, China:IEEE, 2012. 175-179[21] 李红. 自动泊车系统路径规划与跟踪控制研究[D]. 湖南大学, 2014.
[22] 李红, 王文军, 李克强. 基于 B 样条理论的平行泊车路径规划[J]. 中国公路学报, 2016, 29(9).
[23] Vorobieva H , Glaser S , Minoiu-Enache N , et al. AutomaticParallel Parking in Tiny Spots: Path Planning and Control[J]. IEEETransactions on Intelligent Transportation Systems, 2015,16(1):396-410.
[24] Hélène Vorobieva, Sébastien Glaser, Minoiuenache N , et al.Automatic parallel parking with geometric continuous-curvature pathplanning[C]// Intelligent Vehicles Symposium. IEEE, 2014.
[25] 郭孔辉, 姜辉, 张建伟, et al. 基于模糊逻辑的自动平行泊车转向控制器[J]. 吉林大学学报(工学版), v.39(S2):236-240.
[26] 梁钊, 郑国强, 李济顺. 自组织模糊控制的自动泊车路径跟踪控制器[J].火力与指挥控制, 2013(09):54-58.
[27] Li T H S , Chang S J . Autonomous fuzzy parking control of a car-like mobile robot[J]. IEEE Transactions on Systems Man andCybernetics - Part A Systems and Humans, 2003, 33(4):451-465.
[28] Chao C H,Ho C H,Lin S H,et al. Omni-directional Vision-basedParallel-parking Control Design for Car-like MobileRobot [ C ]//InProceedingsofthe2005IEEEInternational Conference onMechatronics,Taipei,Republic of China,2005.
[29] 杨昔阳 , 尤晴曦 , 李洪兴 . 基于变论域理论的自动倒车控制 %TRUCK83BACKER-UPPER BASED ON VARIABLE-UNIVERSE FUZZY CONTROLLER[J]. 北京师范大学学报(自然科学版), 041(004):348-350.
[30] 程 志 江 . 遗 传 算 法 在 自 动 泊 车 辅 助 系 统 模 糊 控 制 中 的 应 用 %TheApplication of Genetic Algorithmin the Fuzzy Control of AutomaticParking Auxiliary System[J]. 模糊系统与数学, 2010, 024(003):160-167.
[31] Daxwanger W / , Schmidt, Günther K. Skill-based visual parkingcontrol using neural and fuzzy networks[C]// IEEE InternationalConference on Systems. IEEE, 2002.
[32] 周培义, 黄迅. 自动泊车系统的控制算法研究[J]. 汽车工程学报, 2014,4(3):172-179.
[33] 江浩斌, 李臣旭, 马世典, et al. 智能车辆自动泊车路径跟踪的非光滑控制 策 略 %Path tracking control of automatic parking forintelligentvehicle based on non-smooth control strategy[J]. 江苏大学学报(自然科学版), 2017, 038(005):497-502.
[34] Jiang K , Seneviratne L D . A Sensor Guided Autonomous ParkingSystem for Nonholonomic Mobile Robots[C]// IEEE InternationalConference on Robotics & Automation. IEEE, 1999.
[35] Paromtchik I E , Laugier C . Motion Generation and Control forParking an Autonomous Vehicle[C]// IEEE INTERNATIONAL CONFERENCEON ROBOTICS AND AUTOMATION. IEEE, 1994.
[36] Pradalier C , Vaussier S , Corke P . Path planning for a parkingassistance system: implementation and experimentation[J]. 2005.
[37] Hsu T H , Liu J F , Yu P N , et al. Development of an automaticparking system for vehicle[C]// Vehicle Power and PropulsionConference, 2008. VPPC '08. IEEE. IEEE, 2008.
[38] Muller B , Deutscher J , Grodde S . Trajectory Generation andFeedforward Control for Parking a Car[C]// IEEE InternationalSymposium on Computer Aided Control System Design, IEEEInternational Conference on Control Applications. IEEE, 2006.
[39] Lee K , Kim D , Chung W , et al. Car parking control using atrajectory tracking controller[C]// International JointInternational on Sice-icase. IEEE, 2007.
[40] 郁伉, 肖本贤, 李艳红. 受非完整性约束的移动机器人路径跟踪算法[J].合肥工业大学学报(自然科学版), 2010(09):41-45.
[41] Solea R , Filipescu A , Nunes U . Sliding-mode control fortrajectory-tracking of a Wheeled Mobile Robot in presence ofuncertainties[C]// Asian Control Conference, 2009. ASCC 2009. 7th. 吉林大学硕士学位论文84IEEE, 2009.
[42] Jong-Min, Yang, Jong-Hwan, et al. Sliding mode control fortrajectory tracking of nonholonomic wheeled mobile robots[J].Robotics and Automation, IEEE Transactions on, 1999.
[43] Aguilar L E , Hamel T , Soueres P . Robust path following controlfor wheeled robots via sliding mode techniques[C]// IntelligentRobots and Systems, 1997. IROS '97. Proceedings of the 1997 IEEE/RSJInternational Conference on. IEEE, 1997.
[44] Soueres P , Hamel T , Cadenat V . A path following controller forwheeled robots which allows to avoid obstacles during transitionphase[J]. 1998.
[45] Fruchard, M. A Framework for the Control of Nonholonomic MobileManipulators[J]. International Journal of Robotics Research, 2006,25(8):745-780.
[46] 杨述斌,刘寒, 蒋宗霖.基于 MPC 的自动泊车控制方法 [J].自动化与仪表,2019,34(08):20-23+38.
[47] 游家 兴 . 如何正确 运用因子分析 法进 行综合评价 [J]. 统 计教育 ,2003(5):10-11.
[48] 耿金花,高齐圣,张嗣瀛. 基于层次分析法和因子分析的社区满意度评价体系[J]. 系统管理学报(6):673-677.
[49] 宁连举. 基于因子分析法构建大中型工业企业技术创新能力评价模型[J].科研管理, 2011, V32(3):51-58.
[50] 任 胜 钢 , 彭 建 华 . The Evaluation and Comparison of RegionalInnovation Capacity Based on Factor Analysis%基于因子分析法的中国区域创新能力的评价及比较[J]. 系统工程, 2007, 025(002):87-92.
[51] Gorsuch R L . Factor analysis[J]. Handbook of Psychology, 1983.
[52] Akaike H . Factor analysis and AIC[J]. Psychometrika, 1987,52(3):317-332.
[53] Riitters K H , O'Neill R V , Hunsaker C T , et al. A factoranalysis of landscape pattern and structure metrics[J]. LandscapeEcology, 1995, 10(1):23-39.
[54] Kaiser H F . The Varimax Criterion For Analytic Rotation In FactorAnalysis[J]. Psychometrika, 1958, 23(3):187-200.
[55] Mahler D A , Harver A . A Factor Analysis of Dyspnea Ratings,Respiratory Muscle Strength, and Lung Function in Patients withChronic Obstructive Pulmonary Disease[J]. The American review ofrespiratory disease, 1992, 145(2 Pt 1):467-470.
[56] Al P M E . Making Sense of Factor Analysis[J]. sage publications,2003.
[57] 柴彦红. 基于回归模型分析法的社区支持农业消费者感知价值维度实证[J]. 江苏农业科学, 2018, v.46(10):321-326.
[58] Adams T , Bezner J , Steinhardt M . The Conceptualization andMeasurement of Perceived Wellness: Integrating Balance Across andWithin Dimensions[J]. American Journal of Health Promotion, 1997,11(3):208-218.
[59] Leung, F T . Clinical and atopic parameters and airway inflammatorymarkers in childhood asthma: a factor analysis[J]. Thorax, 2005,60(10):822-826.
[60] Eyduran E , Waheed A , Tariq M M , et al. Prediction of live weightfrom morphological characteristics of commercial goat in Pakistanusing factor and principal component scores in multiple linearregression[J]. Journal of Animal and Plant Sciences, 2013,23(6):1532-1540.
[61] 何晓群. 现代统计分析方法与应用[M]. 中国人民大学出版社, 1998.
[62] 王国胤, 于洪, 杨大春. 基于条件信息熵的决策表约简%Decision TableReduction based on Conditional Information Entropy[J]. 计算机学报,2002, 025(007):759-766.
[63] 谢宏, 程浩忠, 牛东晓. 基于信息熵的粗糙集连续属性离散化算法[J].计算机学报, 2005, 28(9):1570-1574.
[64] 耿海青, 谷树忠, 国冬梅. Analyses on evolution of household energyconsumption structure based on information entropy%基于信息熵的城市居民家庭能源消费结构演变分析--以无锡市为例[J]. 自然资源学报,2004, 019(002):257-262.
[65] 齐敏芳, 付忠广, 景源, et al. 基于信息熵与主成分分析的火电机组综合评价方法[J]. 中国电机工程学报, 2013, 33(2):58-64.
[66] Suzuki R , Buck J R , Tyack P L . Information entropy of humpbackwhale songs[J]. The Journal of the Acoustical Society of America,2006, 119(3):1849.
[67] J. A. Nú?ez, Cincotta P M , Wachlin F C . Information entropy[J].Celestial Mechanics & Dynamical Astronomy, 1996.
[68] 陈武, 李凡修, 梅平. 应用多目标决策-理想点法综合评价水环境质量[J].环境工程, 2002(03):64-65+5.
[69] 王迎超, 孙红月, 尚岳全, et al. 基于特尔菲-理想点法的隧道围岩分类研究[J]. 岩土工程学报, 2010, 32(4):0-0.
[70] 王欣荣, 樊治平. 群决策中基于语言信息处理的一种理想点法[J]. 中国管理科学, 2002, V(6):84-87. 吉林大学硕士学位论文86[71] Wang Y C , Sun H Y , Shang Y Q , et al. Classification ofsurrounding rock based on Delphi method and ideal point method[J].
Yantu Gongcheng Xuebao/Chinese Journal of Geotechnical Engineering,2010, 32(4):651-656.
[72] Gang T , Bo X , Deng-Jun Z . Application of Ideal Point Method atthe Water Sediment Optimum Operation of Reservoir[J]. Journal ofNorth China Institute of Water Conservancy and Hydroelectric Power,2009.
[73] 状态反馈控制[J]. 自动化技术:英文版, 2005.
[74] 秦长涛, 段广仁. 混合 H_2/H_∞状态反馈控制[J]. 华中科技大学学报(自然科学版), 2010(03):62-65.
[75] 葛建华, 孙优贤, 周春晖. 状态反馈控制系统的容错控制策略[J]. 自动化学报, 1991, 17(2).
[76] Veillette R J . Reliable linear-quadratic state-feedbackcontrol[M]. Pergamon Press, Inc. 1995.
[77] Huang D , Nguang S K . State feedback control of uncertainnetworked control systems with random time-delays[C]// IEEEConference on Decision & Control. IEEE, 2007.
[78] 席裕庚, 李德伟, 林姝. 模型预测控制--现状与挑战[J]. 自动化学报,2013(03):28-42.
[79] Camacho E F , Bordons C . Model Predictive Control[M]. SpringerLondon, 2004.
[80] Morari M , Garcia C E , Prett D M . MODEL PREDICTIVE CONTROL:
THEORY AND PRACTICE[M]// Model Based Process Control. PergamonPress, Inc. 1989.
[81] Kothare M V , Balakrishnan V , Morai M . Robust constrained modelpredictive control using linear matrix inequalities[C]// AmericanControl Conference. IEEE, 1996.
[82] Qin S J , Badgwell T A . A survey of industrial model predictivecontrol technology[J]. Control Engineering Practice, 2003,11(7):p.733-764.
[83] Kouro S , Cortes P , Ren? Vargas, et al. Model Predictive Control-A Simple and Powerful Method to Control Power Converters[J]. IEEETransactions on Industrial Electronics, 2009, 56(6):1826-1838.
[84] Muske K R , Rawlings J B . Model predictive control with linearmodels[J]. AIChE Journal, 1993, 39.
[85] Fernandez-Camacho E , Bordons-Alba C . Model Predictive Controlin the Process Industry[J]. 1995.
[86] 王姗姗. PanoSim:新一代先进汽车智能驾驶模拟仿真系统[J]. 科技纵览,2015(10):68-71.