硕士论文

摘要
智能汽车的发展日益迅速,随之而来的智能驾驶功能也越来越丰富,针对驾驶员的主被动安全功能开发一直备受关注,而关乎弱势道路使用者的安全问题也逐渐被重视。在繁忙的交通环境中,汽车配备的主动安全功能在很大程度上能够避免交通事故的发生,而驾驶员和交通环境中的弱势道路使用者均属于被防护的对象。本文研究的主题是在典型的城市工况下,探讨实时评估碰撞风险指数和决策主动制动时机的方法。本文研究的主要内容包括:主车和行人运动状态估计算法,主车行人碰撞风险评估算法,主动制动决策算法和制动系统响应特性等,重点研究碰撞风险评估和行人运动状态估计。
针对主车和行人的运动状态估计主要运用了基于运动学模型推导的 Kalman 滤波算法,主车运动学模型是参考恒转率匀速运动模型,行人运动学模型是参考匀变速运动模型,然后通过坐标变换,基于当前时刻车辆坐标系推导系统状态向量的关系映射矩阵,进而构建 Kalman 滤波算法中的相关系数矩阵。结合对行人和主车的运动状态估计结果,设计了基于运动学和几何学的碰撞风险评估算法,计算碰撞风险特征参数——碰撞时间,基于该特征参数,设计了模糊逻辑决策算法,根据当前的碰撞时间来输出期望的制动减速度。为了匹配仿真系统中制动系统的控制接口,基于实车制动实验数据搭建了一阶惯性纯滞后的制动系统响应模型,并通过数据拟合手段建立制动减速度与制动主缸压力之间的近似关系,从而将决策期望与制动执行贯通。
借鉴 E-NCAP 中针对行人避撞的相关测试规范,本文基于 PreScan 场景建模软件搭建了相关的测试场景,并结合 Matlab/Simulink 开发相关算法模块,构建场景—算法联合仿真平台,最终完成了相关的仿真测试。
本文一共设计了五种典型测试工况(CPFA、CPNA、CPNC、CPLA 和 CPTA),主动制动决策算法采用模糊逻辑决策,从仿真测试结果来看,行人主车运动状态估计算法效果良好,碰撞风险评估算法也能及时反馈当前的紧急状态,主动制动决策II算法能够连续请求合理的减速度,在完整的仿真测试工况下,本文设计的避撞行人的主动制动决策算法能够完全避撞行人。
关键词:主动制动,运动预测,Kalman 滤波,碰撞风险评估,模糊逻辑
ABSTRACT
The development of smart cars is increasing rapidly, and the accompanying smartdriving functions are becoming more and more abundant. The development of active andpassive safety functions for drivers has always attracted much attention, and safety issuesrelated to Vulnerable Road Users have gradually been paid attention to. In busy traffic,active safety functions equipped with cars can largely avoid traffic accidents, actually,Both drivers and vulnerable road users in the traffic environment need to be protected.
The subject of this paper is to discuss the method of real-time assessment of collision riskindex and decision of active braking timing under typical urban conditions. The maincontents of this paper include: the estimation algorithm of the motion status of the hostvehicle and pedestrian, the evaluation algorithm of the collision risk of the host vehicle,the active braking decision algorithm, and the response characteristics of the brakingsystem.
The Kalman filter algorithm based on the kinematics model is used to estimate themotion state of the host vehicle and pedestrians. The kinematic model of the host vehiclerefers to the Constant Turn Rate and Acceleration motion model, and the pedestriankinematic model refers to the Constant Velocity motion model. The transformation, basedon the current coordinate system of the vehicle, derives the relational mapping matrix ofthe system state vector, and then constructs the correlation coefficient matrix in theKalman filtering algorithm. Based on the results of estimating the pedestrian and hostvehicle's motion, a collision risk assessment algorithm based on kinematics and geometryis designed to calculate the collision risk characteristic parameter—Time ToCollision(TTC). Based on this characteristic parameter, a fuzzy logic decision algorithmis designed. Calculating the desired braking deceleration according to TTC at the presenttime. In order to match the control interface of the braking system in the simulation system,IVa first-order inertial pure hysteresis braking system response model was built based on theactual vehicle braking experimental data, and the braking deceleration and brake mastercylinder pressure were established by data fitting The approximate relationship betweenthem, thus linking decision expectations with brake execution.
Drawing on the relevant test specifications for pedestrian collision avoidance in E-NCAP, this article builds relevant test scenarios based on PreScan scenario modelingsoftware, and develops related algorithm modules in conjunction with Matlab / Simulinkto build a scenario-algorithm joint simulation platform, and finally completes Simulationtest.
In this paper, five typical test conditions (CPFA, CPNA, CPNC, CPLA, and CPTA)are designed. The active braking decision algorithm uses fuzzy logic decision. From theresults of the simulation test, the pedestrian vehicle movement state estimation algorithmworks well, the collision risk assessment algorithm can also feedback the currentemergency state in time, and the active braking decision algorithm can continuouslyrequest a reasonable deceleration in the complete simulation test conditions. Next, theactive braking decision algorithm for pedestrian collision avoidance designed in this papercan completely avoid collision.
Key Word:Active braking, motion state predicting, Kalman filtering, collision risk assessment,fuzzy logic
目 录
摘 要 ················································································ I
ABSTRACT ······································································· III
第 1 章 绪论 ········································································ 1
1.1 研究背景及意义 ···························································· 1
1.2 避撞行人的主动安全技术研究现状 ···································· 2
1.2.1 国外研究现状 ·························································· 2
1.2.2 国内研究现状 ·························································· 3
1.3 避撞行人主动制动系统的评价与测试研究现状 ····················· 5
1.4 研究内容与方法 ···························································· 5
第 2 章 碰撞风险评估算法设计 ················································· 9
2.1 风险评估算法架构 ························································· 9
2.2 基于运动学的行人和主车运动状态估计算法 ······················ 10
2.2.1 Kalman 滤波算法简介 ·············································· 10
2.2.2 基于 Kalman 滤波的行人运动状态估计算法设计 ············ 12
2.2.3 主车运动轨迹估计 ·················································· 21
2.2.4 危险碰撞区域定义 ·················································· 23
2.2.5 基于运动学的碰撞时间计算 ······································ 25
2.2.6 行人运动状态检索库构建 ········································· 31
2.3 本章小结 ··································································· 32
第 3 章 避撞行人主动制动的决策算法研究 ································ 33
3.1 AEB-P 分层控制架构 ···················································· 33
3.1.1 车辆动力学建模 ····················································· 34
3.2 AEB-P 决策层算法设计 ················································· 37
3.2.1 主动制动约束条件计算 ············································ 38
3.2.2 基于驾驶员制动行为的分级决策算法 ·························· 43
3.2.3 基于 TTC 模型的模糊逻辑决策算法 ··························· 44
3.3 制动系统的响应特性研究 ·············································· 48
3.4 本章小结 ··································································· 51
第 4 章 算法模块验证 ··························································· 53
4.1 仿真平台简介 ····························································· 54
4.2 算法仿真验证 ····························································· 57
4.2.1 行人运动状态预测算法仿真验证 ································ 57
4.2.2 碰撞风险评估算法仿真验证 ······································ 67
4.2.3 制动决策算法仿真验证 ············································ 70
4.3 本章小结 ··································································· 71
第 5 章 典型虚拟工况仿真验证 ··············································· 73
5.1 CPFA 场景仿真验证 ······················································ 74
5.2 CPNA 场景仿真验证 ····················································· 76
5.3 CPNC 场景仿真验证 ····················································· 78
5.4 CPLA 场景仿真验证······················································ 80
5.5 CPTA 场景仿真验证 ······················································ 82
5.6 本章小结 ··································································· 84
第 6 章 总结与展望 ······························································ 85
6.1 全文总结 ··································································· 85
6.2 工作展望 ··································································· 86
参考文献 ··········································································· 87
致谢 ················································································· 91
第 1 章 绪论
1.1 研究背景及意义
世界卫生组织(WHO)2015 年发布的《道路安全全球现状报告》指出全球每年行人死亡人数占道路交通事故总死亡人数的 22%左右(如图 1.1 所示),2013 年道路交通死亡人数大约为 125 万人,且实际数据表明对道路安全问题的关注力度还有欠缺,其中的行人、骑自行车者等弱势道路使用者占全球道路交通死亡的 49%,随着全球注册机动车数量增加 16%,人口增加 4%(2010 年到 2013 年数据),交通环境会更加的复杂[1]。因此,对于研究如何保护弱势道路使用者的安全问题成为一大研究热点。

图 1.1 WHO 各区域不同类型道路使用者的道路交通死亡情况
近几年随着通信、计算机、人工智能等技术的飞速发展,汽车的智能化、网联化、共享化、电动化也迎来了巨大市场,自动驾驶汽车的异军兴起带来了汽车格局的变化,长远来看自动驾驶汽车配备的主动安全功能(自动紧急制动系统、前车碰撞预警系统等)可以在很大程度上弥补普通驾驶员的固有缺陷,从而减少因驾驶员吉林大学硕士学位论文2操作不当引起的交通事故。美国国家公路交通安全管理局(NHTSA)2015 年的调查显示,近 94%的交通事故是由于人为因素(操作不当、反应不及时等)引起,即人为因素占主要部分。
综上所述,人类驾驶员存在固有的驾驶缺陷,而智能驾驶环境下的主动控制系统可以很好弥补驾驶员的缺陷,类似自动驾驶汽车配备的一系列主动安全技术(自动紧急制动,自动紧急转向,前向碰撞预警等)均可在一定程度上帮助驾驶员合理的控制车辆状态,通过电控系统提前识别危险和主动干预来提高驾驶安全性,从而降低交通事故发生的概率。
Erik Rosén 等人的研究表明当车辆与行人的碰撞速度从 50km/h 降低到 25km/h时,行人的死亡风险降低 85%[12]。因此针对行人安全的主动安全功能的最终目的还是以降低碰撞车速为主,而整车的制动系统直接影响车辆的速度变化,针对车辆的制动系统合理规划车辆速度对于降低行人死亡风险有重要意义。
1.2 避撞行人的主动安全技术研究现状。
避撞行人的主动安全技术主要包含的内容有:行人检测技术、运动估计、碰撞风险评估、避撞策略和执行系统控制策略等,覆盖了环境感知和决策控制两个重要研究领域。国内外的研究针对不同的侧重点分别作了如下研究。
1.2.1 国外研究现状。
国外对于行人避撞主动安全系统的研究比较早,2004 年 Yotam Abramson 等人基于车载摄像头通过高效算法实现行人检测并采用粒子滤波算法来预测行人轨迹,基于此进行碰撞概率计算[3];2004 年 Fkbdbric Large 等人基于学习环境中行人的特征行为来完成行人运动预测[5];2004 年 Toshihiro Osaragi 基于精神压力的概念构建了描述行人行为的模型并利用真实的行人数据对模型参数进行整定[6];2010 年Samuel Gidel 等人基于车载的激光雷达传感器完成了对于行人目标物的监测、定位、识别和跟踪,主要是关于行人识别算法方面的研究[4];2010 年 Erik Coelingh 等人设计了一种基于行人检测-全力制动的碰撞预警系统 CWAB-PD(Collision Warningwith Full Auto Brake and Pedestrian Detection),在必要的时刻执行最大的制动请求,
当车速不超过 35km/h,可以完全避免碰撞发生[11]。2011 年东京农业大学 SoichiroAoyagi 等人重点研究了在城市交通环境(狭窄道路)行人突然横穿马路过程的运动学模型,针对这种特征场景提出合适的危险碰撞预测机制[9]。
2017 年 ?lvaro Esquer 提出随着车速增加主动转向避撞的策略在一定程度上比主动制动的效率更高,引入了最晚制动点 LPTB(Last Point to Brake)最晚转向点LPTS(Last Point to Steer),并在 Car-to-Car(车避撞车)和 Car-to-VRU(车避撞弱势道路使用者)场景探索了通过主动转向避撞的可能性[7]。J?rg Hillenbrand 等人提出可协调系统潜在利益和驾驶员可接受性及功能责任相关的风险的多级碰撞缓解决策算法[8];2017 年 Min-Ki Park 等人提出了基于 funnel map 架构的目标行人筛选算法应用于早期的自动紧急制动控制,通过计算目标物与主车的碰撞概率作为筛选依据,并基于实车采集的数据校验目标行人筛选算法的精度[10]。
从研究内容来看一部分是集中在基于传感器组件(摄像头或激光雷达)的行人目标物的识别以及目标物的运动状态估计领域,另一部分则是围绕碰撞检测、危险评估以及如何主动避撞的决策算法领域,其中针对行人目标物的运动状态估计主要是通过机器视觉的角度来处理,对于车载硬件的要求过高,不适实际车辆装配;针对主动制动决策主要依靠安全距离和碰撞时间两种参数,通常是依据实验标定相关参数阈值,这种方法的固有缺陷就是使系统的鲁棒性不够强,且实现及应用方式偏繁琐;对于碰撞风险评估的研究,大多数是以当前及历史数据来评判碰撞风险,并没有动态的估计在未来一段时间内的碰撞风险,因此存在一定局限性。
1.2.2 国内研究现状
国内对行人保护方面的研究相比较国外偏晚一些,但是也在相关领域做了不少研究。2015 年哈尔滨工业大学的杨娜等人研究了自动制动系统的参数(包括传感器探测范围、最大制动减速度、制动提前时间和制动协调时间等)对事故中行人发生MAIS3+损伤风险和死亡风险的影响,并结合中国的行人道路交通事故数据整定适合国情的最优参数值[13];2015 年同济大学李霖等人提出基于驾驶员紧急制动行为的危险估计模型的两级预警两级制动的避撞策略,根据危险估计模型输出的危险等级映射到不同等级的制动需求,并结合 PreScan 场景仿真软件进行仿真验证[14];吉林大学硕士学位论文42017 年胡志远等人等人基于 PreScan 进行了自动紧急制动(Autonomous EmergencyBraking,AEB)纵向避撞算法仿真验证,对比了几种经典的安全距离模型(Mazda、Honda、Berkeley 和 Seungwuk Moon)和碰撞时间(Time To Collision,TTC)模型,在不干扰驾驶员正常操作前提下,TTC 模型表现最优[15];黄恒基于事故重建对行人AEB 系统进行离线仿真,对其参数进行敏感性研究,并确立 AEB 系统防护效果评价方法[16];2015 年同济大学李霖和朱西产提出了一种融合制动控制和转向控制的自动紧急控制(Autonomous Emergency Control,AEC)策略,基于驾驶员模型和环境模型估计驾驶员的操作发生事故的可能,由此通过模型预测控制(ModelPredictive Control,MPC)的主动控制算法来纠正或补偿车辆运动[17];重庆大学杨为等人提出了上层模糊控制和下层 PID 控制的分层控制行人避撞策略,其碰撞风险评估模型是基于 TTC 模型[18];湖南大学何颖考虑到行人运动的随机性,采用一阶马尔科夫过程描述行人随机运动,提出只考虑车-人正面碰撞的冲突距离模型,并设计五位变换算法来实时计算行人伤害概率[19];刘召等人基于全向移动机器人平台在全局坐标系下通过卡尔曼滤波算法对移动行人的轨迹进行预测,并进行碰撞检测,为规避与行人的碰撞主动控制机器人行进的方向[20]。
从收集到的研究资料来看,国内研究的重点也集中在行人运动状态估计、碰撞风险评估及主动控制决策三大类。其中行人的运动估计有基于其随机性的概率估计方法,也有基于运动学的线性估计算法;碰撞风险评估算法多半是继承车-车避撞的风险评估方案,有碰撞时间模型和安全距离模型;主动控制决策还是以主动制动为主,主动转向虽然在理论研究上有凸显,但是在实车上的运用还是非常少见。大多数主车行人避撞算法的适应场景都是正面纵向上的避撞,很少有特别针对车辆行驶在弯道上的避撞行人场景,对于纵横向上的避撞(行人横穿车道)场景则更是不多见。另外,通常避撞行人的主动控制算法都是以完全避撞为标准展开,在一定程度上忽略了驾驶员的实际驾驶感受,这其实在某种程度上弱化了驾驶员自身的安全问题,不匹配驾驶员自身操作意图的主动干预指令也完全可能引发驾驶员对车辆的无法挽回的危险操控。

图 1.2 章节关联示意图

图 2.9 主车轨迹宽度计算示意图(曲线运动)
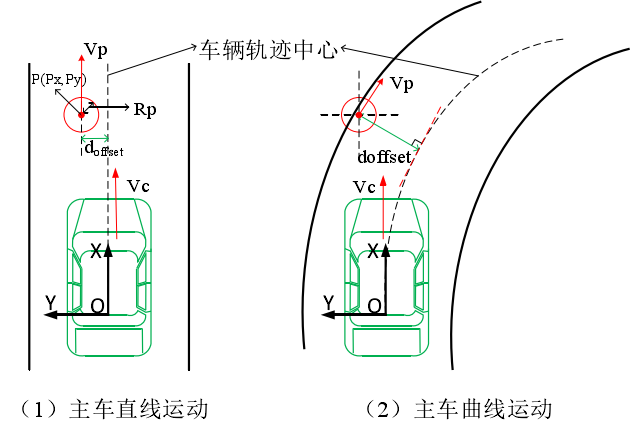
图 2.10 车辆坐标系下行人的偏心距离

图 2.14 场景 2 下的 TTC 定义

图 2.16 初始化算法流程示意图
…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第 6 章 总结与展望
6.1 全文总结
随着科学技术的发展,智能车的应用场合日益广泛,无人驾驶汽车的相关研究也受到极大地追捧,虽然短期内无法达到完全的无人驾驶水平,但是正在向最终目标进步,智能辅助驾驶系统的研发和应用正在缩小这一差距。其中至关重的一项内容则是关乎生命安全的主动安全功能,智能车的研发应用无法避开安全驾驶问题,只有配备了足够可信耐的主被动安全功能的智能车才会被大众所接受,因此,本文研究的避撞行人主动制动功能是智能车研究领域的热点。
本文研究的重点在于对人车环境的碰撞风险评估和主动制动决策,基于传感器组件的环境感知和基于底层执行器动态响应特性不作深入研究,在已知行人当前的位置信息后,在当前车辆坐标系下(相对坐标系)基于运动学模型通过改进的Kalman 预测算法来估计行人和主车的运动状态及轨迹,以此为基础进行运动学碰撞风险评估,基于评估结果来量化碰撞风险等级,然后通过模糊逻辑决策算法输出期望制动减速度,最后通过搭建的制动系统响应模型输出执行器实际的控制量制动主缸压力。其中针对行人运动状态估计分别从两类运动学模型作仿真对比,最终基于匀变速运动模型(CA 模型)的估计效果更优。主动制动决策算法比较了传统分级制动和基于模糊逻辑的连续制动算法,从制动减速度请求过程而言,模糊逻辑决策的期望减速度更符合驾驶员的制动感受。
本文基于算法理论的推导,在 PreScan 和 Matlab/Simulink 联合仿真环境下搭建了简易的测试场景进行验证,依据仿真结果来指导算法的优化方向,同时也参考了E-NCAP 针对行人避撞的测试规范,搭建类似测试场景进行全工况的功能验证,另外也扩充了其测试类别,针对碰撞风险评估算法,个性化设计了多人横穿人行道的测试场景,相关的仿真结果详见第 5 章。
由于行人避撞的实车试验要求非常高,实验室的条件受限,并不能进行相关的实车实验,因此在仿真环境下作了大量的仿真实验,依托 PreScan 强大的场景建模功能可以基本实现实车试验中的类似测试场景。
本文的创新点如下:
(1)基于当前车辆坐标系(相对坐标系下)搭建基于运动学的 Kalman 滤波算法,与全局坐标系下的运动状态估计方法相比,在相对坐标系下可以有效减小累计误差,提高估计精度。
(2)针对多目标行人工况,提出了筛选最危险目标行人算法,评估多目标场景下的碰撞风险。
(3)提出的基于模糊逻辑的制动决策算法改善了传统的分级制动决策算法制动请求过程的顿挫感和不连续性。
6.2 工作展望
基于有限的研究平台,本文在以下地方还存在不足,在以后的学习工作中将继续深入研究:
1、行人运动估计算法仅输入了行人在车辆坐标系下的 XY 值,没有用到传感器输出的相对速度信息,从算法原理上看,输入的测量信息维度越多,其估计精度也会越高,后期可以将相对速度引入该运动估计算法中。
2、主车运动状态估计是参考 CTRV 模型,在实际的车辆运动中,主车的加速度是不能忽略的,特别是在进行主动制动时,因此,后期可以采用基于 CTRA 模型替代,并提供实际的加速度来修正 CTRA 模型。
3、当目标行人的非线性极强时(行人在穿行过程中急停),Kalman 算法的估计精度会比较低,在危急时刻会直接影响主动制动功能,后期针对完全非线性的目标输入情况,可以开展基于马尔科夫过程的非线性运动状态估计算法研究。
4、针对行人避撞测试,E-NCAP 对传感器、环境等都有相应的测试评价体系,本文由于实车试验限制均无法实现,因此,后期有条件可以进行相关的传感器在环、执行器在环试验,在实际的传感器和执行器上验证算法的效果。
参考文献
[1] https://www.who.int/violence_injury_prevention/road_traffic/zh/.
[2] SINGH S. Critical Reasons for Crashes Investigated in the National Motor VehicleCrash Causation Survey[R].Washington DC: National Highway Traffic SafetyAdministration,2015.
[3] S. Gidel, P. Checchin, C. Blanc, T. Chateau and L. Trassoudaine, "PedestrianDetection and Tracking in an Urban Environment Using a Multilayer LaserScanner," in IEEE Transactions on Intelligent Transportation Systems. 2010.
[4] Y. Abramson and B. Steux, "Hardware-friendly pedestrian detection and impactprediction," IEEE Intelligent Vehicles Symposium, 2004.
[5] F. Large, D. Vasquez, T. Fraichard and C. Laugier, "Avoiding cars and pedestriansusing velocity obstacles and motion prediction," IEEE Intelligent VehiclesSymposium, 2004.
[6] T. Osaragi, "Modeling of pedestrian behavior and its applications to spatialevaluation," Proceedings of the Third International Joint Conference onAutonomous Agents and Multiagent Systems, 2004. AAMAS 2004., New York, NY,USA, 2004.
[7] E.?lvaro, A.Andrés,B.Sébastien,S.Laura. " Study of the application of steeringsupport systems to complement autonomous emergency braking systems for activecollision avoidance strategies," Proceedings of the 25th International TechnicalConference on the Enhanced Safety of Vehicles (ESV).
[8] J. Hillenbrand, A. M. Spieker and K. Kroschel, "A Multilevel Collision MitigationApproach — Its Situation Assessment, Decision Making, and PerformanceTradeoffs," in IEEE Transactions on Intelligent Transportation Systems, 2006.
[9] Aoyagi, S., Hayashi, R., and Nagai, M., "Modeling of Pedestrian Behavior inCrossing Urban Road for Risk Prediction Driving Assistance System," SAETechnical Paper 2011.
[10] M. Park, S. Lee, C. Kwon and S. Kim, "Design of Pedestrian Target Selection WithFunnel Map for Pedestrian AEB System," in IEEE Transactions on VehicularTechnology,2017.
[11] E. Coelingh, A. Eidehall and M. Bengtsson, "Collision Warning with Full AutoBrake and Pedestrian Detection - a practical example of Automatic Emergency 吉林大学硕士学位论文88Braking," 13th International IEEE Conference on Intelligent TransportationSystems, Funchal, 2010.
[12] Erik Rosén, Ulrich Sander, Pedestrian fatality risk as a function of car impact speed,Accident Analysis&Prevention,2009.
[13] 杨娜,张臻,赵桂范,王剑锋,王大方.自动制动系统行人保护效果的研究[J].汽车工程,2015.
[14] 李霖,朱西产,董小飞,马志雄.自主紧急制动系统避撞策略的研究[J].汽车工程,2015.
[15] 胡远志,吕章洁,刘西.基于 Pre Scan 的 AEB 系统纵向避撞算法及仿真验证[J].汽车安全与节能学报,2017.
[16] 黄恒. 基于事故重建的自动紧急制动系统对行人保护效果研究[D].上海工程技术大学,2016.
[17] 李霖,朱西产.智能汽车自动紧急控制策略[J].同济大学学报(自然科学版),2015.
[18] 杨为,赵胡屹,舒红.自动紧急制动系统行人避撞策略及仿真验证[J].重庆大学学报,2019.
[19] 何颖. 基于概率方法的人车冲突中行人伤害的预测[D].湖南大学,2018.
[20] 刘召,宋立滨,于涛,耿美晓.基于行人轨迹预测的全向移动机器人路径规划[J].计算机仿真,2018.
[21] Euro NCAP VULNERABLE ROAD USER (VRU) PROTECTION(V3.0.2,2019).
[22] 中 国 新 车 评 价 规 程 ( C-NCAP ) 2018 年 版 管 理 规 则 .http://www.c-ncap.org/cms/files/cncap-regulation-2018.pdf.
[23] P. J. Hargrave, "A tutorial introduction to Kalman filtering," IEE Colloquium onKalman Filters: Introduction, Applications and Future Developments, London, UK,1989.
[24] R. Schubert, C. Adam, M. Obst, N. Mattern, V. Leonhardt and G. Wanielik,"Empirical evaluation of vehicular models for ego motion estimation," 2011 IEEEIntelligent Vehicles Symposium (IV), Baden-Baden, 2011.
[25] Alfred Eckert, Andree Hohm, Stefan Lueke. An Integrated ADAS Solution ForPedestrian Collision Avoidance. Cassis & Safety Division, Continental,2013.
[26] 余志生. 汽车理论[M]. 机械工业出版社, 2009.
[27] 李霖,朱西产,陈海林.驾驶员制动和转向避撞极限[J].同济大学学报(自然科学版),2016.
[28] W.Hugemann,M.Nickel. Longitudinal and Lateral Accelerations in Normal DayDriving.2003.
[29] 胡远志,吕章洁,刘西.基于 Pre Scan 的 AEB 系统纵向避撞算法及仿真验证[J].汽车安全与节能学报,2017.
[30] Kondoh T,Yamamura T,Kitazaki S,et al. Identification of Visual Cues andQuantification of Drivers’ Perception of Proximity Risk to the Lead Vehicle in Car-Following Situations[J]. Journal of Mechanical Systems for Transportation andLogistics, 2008.
[31] John D.Lee,Daniel V.McGehee etal. Collision Warning Timing,DriverDistraction,and Driver Response to Imminent Rear-end Collisions in a High-fidelityDriving Simulator[J].Human Factors,2002.
[32] Zhang Y , Antonsson E K , Grote K . A new threat assessment measure for collisionavoidance systems[C]// Intelligent Transportation Systems Conference, 2006. ITSC'06. IEEE. IEEE, 2006.
[33] 刘普寅. 模糊理论及其应用[M]. 国防科技大学出版社, 1998.
[34] Yager R R,Zadeh L A ,Pub K A. Introduction to fuzzy logic applications inintelligent systems[M]. Kluwer Academic, 1992.
[35] Llorca D F , Milanes V , Alonso I P , et al. Autonomous Pedestrian CollisionAvoidance Using a Fuzzy Steering Controller[J]. IEEE Transactions on IntelligentTransportation Systems, 2011.
[36] Winkler S, Werneke J, Vollrath M. Timing of early warning stages in a multi stagecollision warning system: drivers' evaluation depending on situational influences[J].
2016.
[37] Shimizu T , Raksincharoensak P . Motion planning via optimization of riskquantified by collision velocity accompanied with AEB activation[C]// 2017 IEEEInternational Conference on Vehicular Electronics and Safety (ICVES). IEEE, 2017.
[38] Yager R R , Zadeh L A , Pub K A . Introduction to fuzzy logic applications inintelligent systems[M]. Kluwer Academic, 1992.
[39] 罗逍. 面向正面碰撞工况的碰撞预判系统关键技术研究[D].清华大学,2016.
[40] Lee J D , Mcgehee D V , Brown T L , et al. Collision Warning Timing, DriverDistraction, and Driver Response to Imminent Rear-End Collisions in a High-Fidelity Driving Simulator[J]. Human Factors: The Journal of the Human Factorsand Ergonomics Society, 2002.
[41] 叶一凡. 智能汽车纵横向主动避撞控制策略研究[D].吉林大学,2019.
[42] 张金旺,章永进,徐友春.基于概率统计的车辆运动轨迹预测方法[J].军事交通学院学报,2017. [43] 刘象祎. 行人机动不确定下的人车碰撞概率预测[D].湖南大学,2017.
[44] 李霖,朱西产,陈海林.驾驶员制动和转向避撞极限[J].同济大学学报(自然科学版),2016.
[45] 李肖含. 汽车自适应巡航控制系统模糊控制策略研究[D].北京理工大学,2015.
[46] 刘凡. 智能车辆前方机动目标的运动状态识别方法研究[D].吉林大学,2014.
[47] 韩东鑫.汽车 AEB 系统测试方法国内外研究现状分析[J].西部皮革,2018.
[48] 陈强,连晓威,李旭东.通过真实交通事故数据验证 AEB 行人系统的有效性[J].
质量与认证,2018.
[49] 黄如林. 无人驾驶汽车动态障碍物避撞关键技术研究[D].中国科学技术大学,2017.
[50] 王戡,张仪栋,徐建勋. 自动紧急刹车系统(AEB)测试场景研究[C]. .西南汽车信息:2016 年第 6 期(总第 363 期).:重庆汽车工程学会,2016:2-9.
[51] 黄丽琼. 基于制动/转向的汽车主动避撞控制系统研究[D].南京航空航天大学,2016.
[52] 武冬梅. 分布式驱动电动汽车动力学控制机理和控制策略研究[D].吉林大学,2015.