声学论文

摘 要: 首先阐述了水下电磁探测技术的现实意义,之后介绍了国外水下电磁探测、预警系统的研究现状,以及电场传感器、磁场传感器的性能指标。通过对国内水下电磁探测技术的发展历程以及与国外的差距进行分析,指出未来水下电磁探测系统集成化、智能化、系统化、无人化、多元化和网络化的发展趋势。
关键词: 舰船; 水下电磁探测; 电场传感器; 磁场传感器;
Abstract: Firstly,the practical significance of underwater electromagnetic detection technology is elaborated. Then,the research status of underwater electromagnetic detection and early warning system abroad is introduced,as well as the performance indexes of electric field sensors and magnetic field sensors. Based on the analysis of the development process of domestic underwater electromagnetic detection technology and the gap with technologies of foreign countries,the development trends of integration,intelligence,systematization,unmanned,diversification and networking of underwater electromagnetic detection system in the future are pointed out.
Keyword: warship; underwater electromagnetic detection; electric field sensor; magnetic field sensor;
0 、引言
传统水下探测手段是声探测技术,包括被动声与主动声探测两种方法。主动声探测存在探测目标远、功耗大、易暴露等特点,而被动声探测存在探测距离有限、功耗低、隐蔽性强等特点。随着减振降噪技术的使用,水中目标的辐射噪声级大幅度减小,再加上声线弯曲、声混响等自然条件的制约,被动声探测的难度逐渐显现。为了提高对水下目标的探测能力,亟需研究光、电、磁、红外、热尾流、地震波、压力场、重力场等非声探测技术。相比于声场和其他非声物理场,水下电磁场是水中目标的重要暴露源,国内外研究表明,舰船电磁场是一种可以用来对目标进行探测和识别的信号源[1,2,3,4,5]。舰船磁场主要分为:稳态磁场(铁磁场、感应磁场、涡流磁场)和交变磁场(轴频磁场、电磁设备辐射产生的磁场)。电场主要划分为:稳态电场(腐蚀相关静电场、感应电场)和交变电场(轴频电场、工频电场、电磁设备向外辐射产生的电场等)。
水下电磁探测具备不受水文气象条件限制、探测性能稳定可靠、隐蔽性强、识别能力强和定位精度高等优点,不仅可应用于水下远距离的探测,还可应用于对目标信号的定位和识别,20世纪90年代,美国将电磁探测列为继声场探测之后又一优先发展的技术,以作为声探测的有效补充。近年来,在世界各国军方和研究机构掀起了水下电磁探测的研究浪潮。
1 、国外水下电磁探测的研究现状
1.1 、水下电磁探测系统的研究现状
早在第二次世界大战期间,就出现了利用磁信号动作的磁引信,除了磁场探测方面外,20世纪50年代,苏联还相继装备了非触发电场引信锚雷:КСМ、УГМ和ПМ–2[6,7]。60年代初,美国和加拿大两国海军利用冰山设置电场探测电极,配合卫星定位系统对航行于白令海峡的苏联潜艇进行搜索,并成功搜索到了“特列沙拉”号核潜艇的位置[8];60年代末期,苏联研制成功的Комоя电、磁封海控制系统,用来对海湾或海岸的军事要塞实行安全保卫和警戒;70年代末期,美国在德克萨斯州外的科珀斯克里斯蒂航道内对舰船轴频电磁场进行了测量,并成功探测到目标1.6 km外的舰船信号,通过匹配滤波技术,探测距离可达5 km[9];苏联对潜艇通过时内波切割地磁场产生的感应电场进行了测量,结果表明内波引起的感应电场可达几十?V/m的量级,且信号周期在600 s左右。

80年代初,美国利用电场探测系统成功探测到了目标10 km外的电流源信号(信号源强度为1 000 A·m)[10],苏联VNIIOFI研究院研制的Anagram水下预警系统(包含240个电极,两电极之间的距离为250 m,可布设在沿岸100 km范围内)用于探测、跟踪潜艇和舰船信号,同时可探测潜艇的下潜深度[11]。进入90年代后,水下低频电磁探测技术又得到了新的发展,如美国学者对潜艇及舰船航行过程中尾流产生的感应电磁场进行了研究,得到了尾流感应电磁场传播距离远、衰减慢、频谱为0.1 Hz左右的线谱信号的结论。随后,美、德等国对潜艇螺旋桨剩磁产生的轴频磁场进行了研究,20世纪末西班牙研制的“MINEA”沉底型水雷(如图1所示)和锚雷[12],2011年意大利研制的“ASTERIA”沉底型水雷(如图2所示)除了采用静电、静磁场信号作为被动信号源,还采用了低频电磁场作为其信号源[13]。
图1“MINEA”沉底型水雷

Fig.1“MINEA”submerged mine
图2 意大利“ASTERIA”水雷
Fig.2“ASTERIA”mine of Italy
21世纪初,西班牙SAES公司研制了SIDS多物理场海洋警戒系统是基于声和电场信号基础上,主要用于对重要港口的水下警戒。美国于21世纪研制成功了水下电磁探测浮标(频率范围为0.5~30 Hz),作为声探测的补充,该探测浮标解决了海洋环境电磁场噪声对探测系统的影响,可对浮标周围800~2 000 m范围内的潜艇目标进行探测[14]。值得注意的是,日本也在大力投入水下电磁探测技术相关的研究。
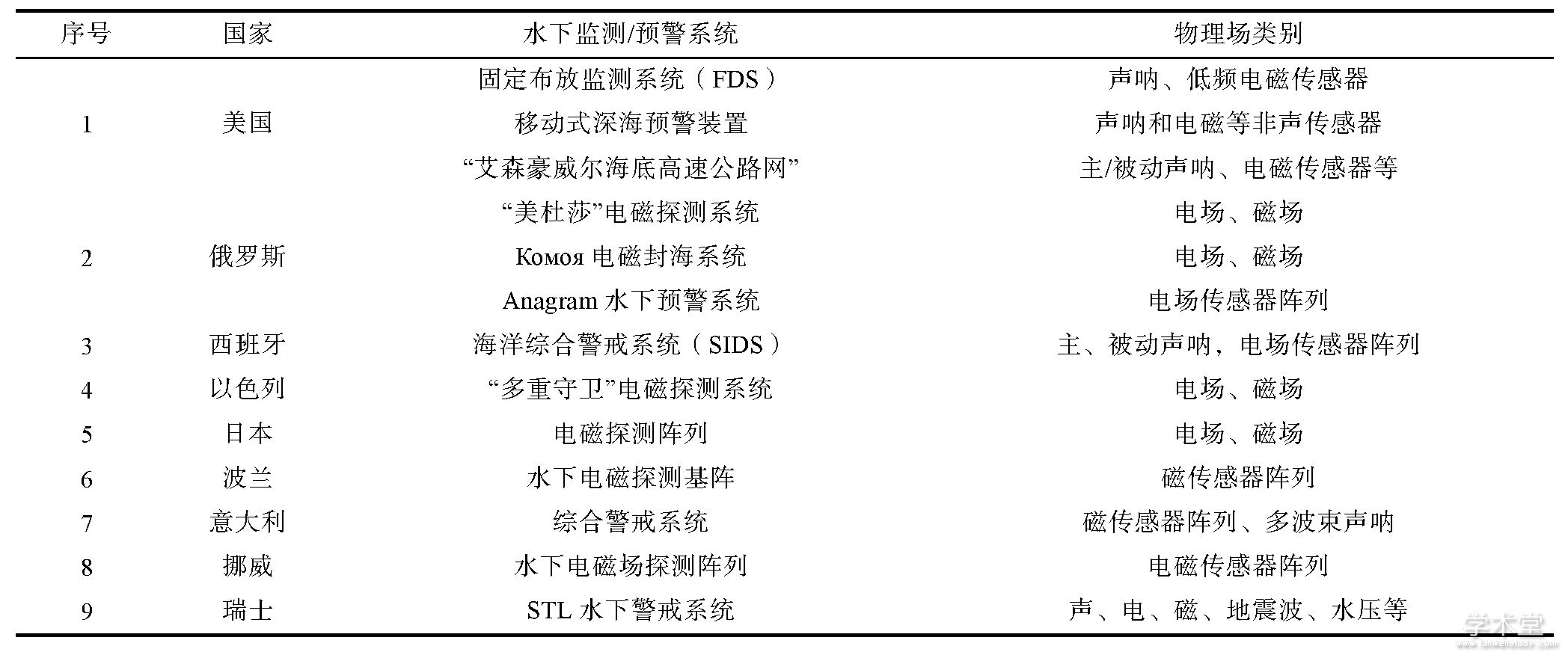
目前,美、俄等国均研制和列装了包含电、磁节点在内的探测和攻击的海底预警监测网,如艾森豪威尔海底高速观测网、Комоя电磁封海系统、STL水下警戒系统等,世界各国与水下电磁探测相关的阵列如表1所示。由此可知当前国外的水下监测网络十分发达,具有多种信号的预警探测系统,探测目标信息源涵盖了声场、电磁、磁场等多种物理场。
表1 国外水下电磁探测相关系统
1.2、 电磁场测量技术现状
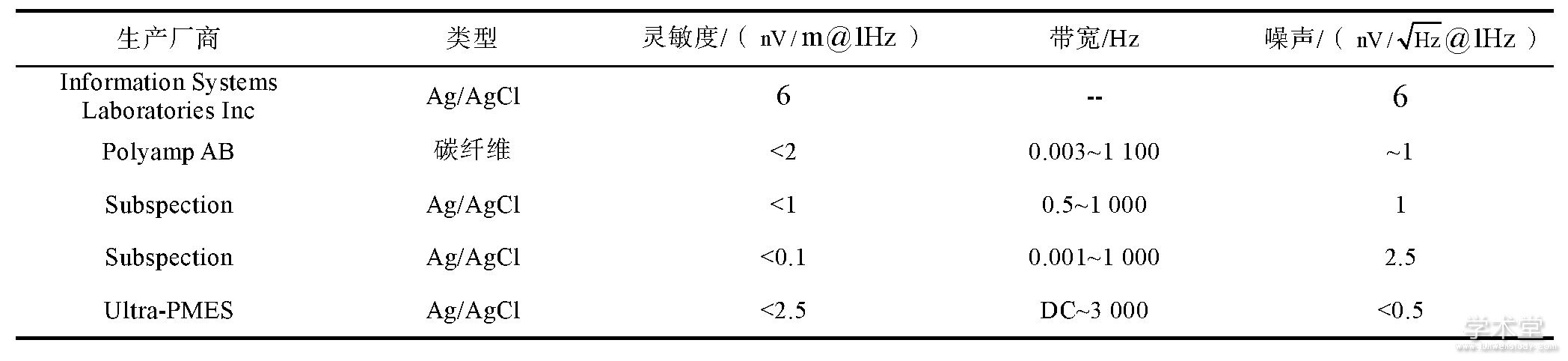
利用电、磁场探测水下目标信号,需建立在准确测量的基础上。在海洋电场测量方面,主要使用碳纤维电极和Ag/Ag Cl电极作为电场传感器,其中,Ag/Ag Cl电极的使用最为普遍。美国ISL公司(Information systems laboratories)、英国Ultra Elec tronics PMES公司、德国的Ludwig Systemtechnik公司、瑞典的Polyamp AB公司、西班牙SAES公司生产的Ag/Ag Cl电极具有低噪声、高稳定性的显着特点。截止到2015年,国外典型的海洋电场传感器技术水平汇总表如表2所示。
表2 海洋电场传感器性能列表
前置放大器的噪声水平直接影响测量系统的噪声,国外早期在海洋环境电场测量中,为了减小前置放大器在低频段的噪声,使用了斩波放大器。进入20世纪80年代以后,随着低噪声差分放大器和仪表放大器的出现,普遍使用了差分放大器或仪表放大器对一对电极之间的电位差信号进行前置放大,其噪声指标相对于80年代的水平,降低了80%,如Ultra Electronics PMES公司生产的前置放大器的噪声<0.4nV/Hz@1Hz。
在磁场测量领域常用的磁测仪器主要有:磁通门磁强计、感应式磁传感器、光泵磁强计、质子旋进磁力仪等。磁通门传感器因测量磁矢量信号,主要被用作水雷磁引信的接收单元,如“MINEA”、“ASTERIA”、“STONE FISH”水雷的磁接收单元均采用了磁通门传感器,但磁通门传感器分辨率较低,探测距离有限。
光泵磁强计和质子旋进磁力仪传感器分辨率较高,但功耗较大,通常可达几十W的量级,主要应用于航空磁探,如美国的P-3反潜巡逻机使用的AN/ASQ-081氦光泵磁强计。感应式磁传感器主要是基于法拉第电磁感应定律接收磁场变化信号的接收器,其信号灵敏度较高,如乌克兰生产的LEMI120磁传感器的灵敏度可达0.1 pT@1Hz,且传感器为无源接收器,适合于水下长期工作,其缺点是接收的磁场信号与目标的航速关系密切,且接收方向单一,尺寸较大。国内外部分磁场传感器技术水平汇总如表3所示[15]。
表3 部分磁场传感器性能指标

2、 国内水下电磁探测研究现状
国内在铁磁性磁场的探测方面研究较早,而在电场和交变磁场方面的研究较晚。20世纪80年代开始研究水下电场,90年代末开始研究电场测量技术,经过多年的发展,国内在水中目标水下电磁场产生机理、建模、传播规律、探测及隐身、标准建设等军事应用领域及在海洋电磁法勘探、环境监测等海洋勘探领域取得长足发展。初步打破了国外在低噪声电场电极、磁通门传感器、电磁场建模及反演、检测算法等方面的技术封锁,具体体现在:
1)厘清了水中目标电磁场的产生机理,解决了水下电磁场建模仿真和反演计算的问题;
2)研制出了低噪声Ag/AgCl电极和电场测量系统,电极噪声大幅度降低,性能基本达到国外的先进水平;
3)具备高精度磁场传感器研制能力,研制的磁通门传感器、感应式磁传感、光泵磁强计等均能达到国际先进水平。
与国外先进国家相比,国内的不足主要体现在:
1)电磁场特征分析及水下电磁场微弱信号信息处理技术。
海洋环境电磁场信号作为目标信号的主要背景干扰源,直接影响目标检测概率和准确性。一方面,由于国内获取的数据有限,尤其是缺乏高海况下的海洋环境电磁场信号,导致对背景信号的特征认识尚存在局限性;另一方面,国内所提的基于小波变换、EMD分解、1.5维线谱提取等低频电场信号检测算法多为静态检测,而在水下探测中,更关注的是信号的实时检测;最后,受水下探测系统低功耗的要求,实时检测算法应简单易行,而国内目前在微弱信号实时提取方面与国外仍存在较大差距。
2)水下电磁场定位与识别技术。
国内研究的电磁探测系统多是基于单节点系统的,所做的工作还是针对单节点系统电磁传感器噪声较大、探测距离有限的问题进行的,苏联早在20世纪80年代,即利用电磁阵列实现了对潜艇目标的准确定位,定位深度误差小于10 m。
3)电磁与其他物理场联合探测技术。
国外不仅开展此方面的工作较早,还形成了水下联合预警探测的装置,而国内目前还未形成相应的装备。
3 、水下电磁探测的发展趋势与展望
随着对海洋资源更加广泛深入的开发利用,以及对自身战略安全考虑,当今各军事强国大多将战略的重心放到了海上,为建立庞大的情报网络,越来越重视水下监视网络的发展,水下电磁探测作为重点研究和突破的非声探测手段是目前最为热门的研究技术之一。水下电磁探测技术的发展趋势可以从以下几方面来看。
1)集成化和智能化。
集成化:实现电、磁,甚至声、水压等多物理场测量的集成,数字信号输出、信息存储和记忆、逻辑判断、双向通信、自检、自校准、自补偿、数值处理等功能,使得传感测量单元成为一个标准件,可增加探测系统的移植性和互换性。
智能化:能够在复杂而多变的环境中,迅速、有效、准确地获取、分析、处理和综合各物理场传感器信息,基于多传感器信息融合、模式识别等多种手段做出正确的描述,实现对水中目标探测、识别、定位和决策处理。
2)系统化和无人化。
随着无人机、无人水下航行器、无人艇技术的发展成熟,将水下电磁探测设备封装为一个系统化模块,作为无人平台的一个可选择搭载,在需要时执行警戒或探测水中目标的任务,可增加水下电磁探测系统应用的灵活性,亦可拓展应用范围。
3)多元化和网络化。
多元化:目前国外成熟的水下监测系统,大多采用的是多手段联合探测,多手段可以相互取长补短,充分发挥系统效能,例如电、磁和声的结合即可弥补声抗干扰能力差、虚警率高的问题,也可解决电、磁探测距离不足的问题。
网络化:由多个单一探测节点组合成探测阵列、监测网络,实现多节点数据融合,增加监测系统的控制范围。
展望未来,在“智慧海洋”、“透明海洋”中,水下电磁探测技术必然发挥重要作用。
参考文献
[1]龚沈光,卢新城.舰船电场特性初步分析[J].海军工程大学学报,2008,20(2):1-4.
[2] 程锦房.水雷电场引信原理研究[D].武汉:海军工程大学,2002.
[3] 龚沈光,刘胜道,孙明,等.腐蚀防腐因素引起舰船电场空间分布特性模型和实验研究[R].武汉:海军工程大学,2004.
[4] DYMARKOWSKI K,UCZCIWEK J. The extremely low frequency electromagnetic signature of the electric field of the ship[C]//Conf. Proc. UDT. Europe:UDT,2001.
[5] HOITHAM P,JEFFREY I,BROOKING B,et al.Electromagnetic signature modeling and reduction[C]//Conf. Proc. UDT. Europe:UDT,1999.
[6] 郑军林.舰船电场研究概况及其军事应用[J].舰船工程研究,2007(2):29-33,40.
[7]牟兰.国外舰船电场特性研究及其在水雷战上的应用[J].舰船科学技术,2012,39(4):138-142.
[8] 孙明.舰船感应电场和极低频电场研究[D].武汉:海军工程大学,2003.
[9] BOSTICK F,SMITH H,BOEHL J. The detection of ULF–ELF emissions from moving ships[R]. New York:State Academic Educational Institutions,1977:13–24.
[10] CHAVE A, CONSTABLE S. Electrical methods in Geophysics II-Applications[M]. US:Society of Exploration Geophysicists,1991.
[11]ZOLOTAREVSKII Y,BULYGIN F,PONOMAREV A, et al. Methods of measuring the low-frequency electric and magnetic fields of ships[J]. Measurement Techniques,2005,48(11):1140-1144.
[12]傅金祝.MINEA-先进的非触发教练水雷系统[J].水雷战与舰船防护,2008,16(2):55-58.
[13] SAES Company. Multi-influence range system[EB/OL].[2012-3-20]. http://www.electronica-submarina.com.
[14] 贾亦卓.舰船轴频电场探测及检测方法研究[D].武汉:海军工程大学,2013.
[15] 周建军.基于无人机平台的磁干扰补偿与目标探测方法研究[D].武汉:海军工程大学,2014.