声学论文

摘 要: 文中介绍了声呐系统的组成、工作原理以及在海管挖沟施工中的应用。以实际工程为例,说明了声呐在挖沟机上的安装方式以及使用方法。通过优化声呐的参数设置,达到最佳监控效果,满足了海底管道挖沟安全高效施工的需求,达到了实时监控开沟深度的目的。该设置方法可为后续其他项目施工声呐设置提供借鉴。
关键词: 声呐; 挖沟机; 海洋工程; 海底管道;
Abstract: This paper introduced the composition, working principle and application of the sonar system in the trench excavation. Taking a project as an example, the installation method and application of sonar in the trenching machine were introduced. The parameter setting of sonar was optimized to meet the demand of safe and efficient construction of submarine pipeline trench and achieve the purpose of monitoring trench depth. This setting method can also provide reference for the following construction sonar setting of other projects.
Keyword: sonar; trencher; offshore engineering; submarine pipeline;
0、 引言
海底管道是海上石油生产运输的主要通道,是连接平台之间、平台与陆地炼油厂的海上通道[1]。对海底管道最有效的防护方法是采用挖沟方式将海底管道掩埋至海床面以下。挖沟机在水下施工时,施工人员无法直接观察到水下挖沟状态,为了确保挖沟施工中的海管安全和确保管沟开挖深度满足要求,挖沟机前后方一般会各安装一套声呐用于监控,声呐的成像效果直接影响施工人员对水下施工状态的判断。

1 、声呐系统的组成及原理
1.1、 声呐系统组成
声呐是利用水中声波对水下目标进行探测、定位和通信的电子设备[2]。声呐监控系统主要组成包括:
(1)工控机/显示器或笔记本电脑:用于安装声呐控制软件,并通过软件对声呐系统进行参数设置和修改;显示器显示声呐扫描图像。
(2)甲板控制盒:用于声呐头供电及信号传输,安装在工控机附近,将采集的水下声呐信号传输到工控机。
(3)声呐头:声呐监控系统的关键设备,直接采集水下信号,声呐头的扫描质量直接关系到监控系统观测效果。换能器是声呐头很重要的组成装置。换能器的性能和声呐系统的灵敏度直接相关[3]。
(4)连接电缆、信号线及水密连接器等。
1.2 、基本工作原理
挖沟机用声呐是一种利用声波在水下的传播特性,通过电声转换和信息处理,完成水下探测和通讯任务的电子设备。挖沟机用声呐属于主动式声呐,利用水中声波对海管和管沟进行定位和测量。
采用声波探测,具有自身独特的优势。其他探测手段的作用距离都较短。电磁波是空气中传播信息的重要载体,但由于海水是一种导电介质,向海洋空间辐射的电磁波会被海水介质本身所屏蔽,因而电磁波在海水中的传播受到严重限制。光波是一种更高频率的电磁波,在海水中的衰减更严重[4]。
近年来,声呐技术在水下测深、定位、目标探测与识别、通信、导航、遥控、海底遥感(地质、底层、地貌)、寻找油气、矿产开发等方面具有广泛应用。
2 、声呐在挖沟施工中的应用
目前,海底管道挖沟施工,通常采用后挖沟方法,即先将海管铺设完成后,再使用挖沟机开挖管沟,将海管掩埋至海床面以下。
为了使工作母船上的操作人员及时掌握水下挖沟机状态和管沟开挖深度,通常在挖沟机前后安装水下摄像头和声呐。
水下摄像头配备水下照明情况下,可清晰观察海床及海底管道状态。但由于国内现有海底管道挖沟机大多采用水射流方式,挖沟施工过程中,在高速水流的作用下,海底大量泥沙悬浮在挖沟机周围。尤其在渤海海域,底层海水比较浑浊,加之悬浮泥沙的影响,使得施工人员无法直接通过摄像头观察水下状态。因此在渤海海域的挖沟施工中,基本已弃用摄像头这一观测手段。
潜水员水下观测沟深,可比较直观反映开沟深度,但潜水作业风险高,耗时长,一般情况下不会频繁安排潜水员下水作业。
而声呐是通过声波反射的方式进行成像,通过调节声呐频率,可达到最优成像效果。目前,海洋工程领域的挖沟机上,均配备声呐作为主要观测海管及管沟的设备。
与潜水探摸相比,声呐探测可远程监控、实时测量,工作量小,风险低,优势明显[5]。
3、 主要参数设置
目前,挖沟机用声呐主要是彩色图像声呐,以某款声呐为例,在渤海中部某油田海管挖沟施工中,经过反复调整测试,最终确定了最优参数组合。主要参数设置如下:
(1)频率:可在330 kHz至1 MHz调节,主要工作频率为675 kHz。
(2)通讯方式:采用RS485或RS232串行通讯,采用水密连接器进行电源连接及信号传输。
(3)扫描角度:360°连续扫描或以任意角度范围作往复扫描;挖沟施工时,通常选择150°扫描范围即可满足观测需要。
(4)扫描模式:一般选择扇面,使扫描成像的方向与海床泥面实际方向一致,便于操作人员观察和测量。
(5)增益:根据图像的对比度进行调节,若反射强烈,需将增益调低。
(6)扫描速度:选择中速到快速,确保扫描图像及时反映水下实际状况。
(7)作用距离:设置为20 m左右,即可完全探测到管沟及两侧海床。作用距离越小,图像分辨率越高。
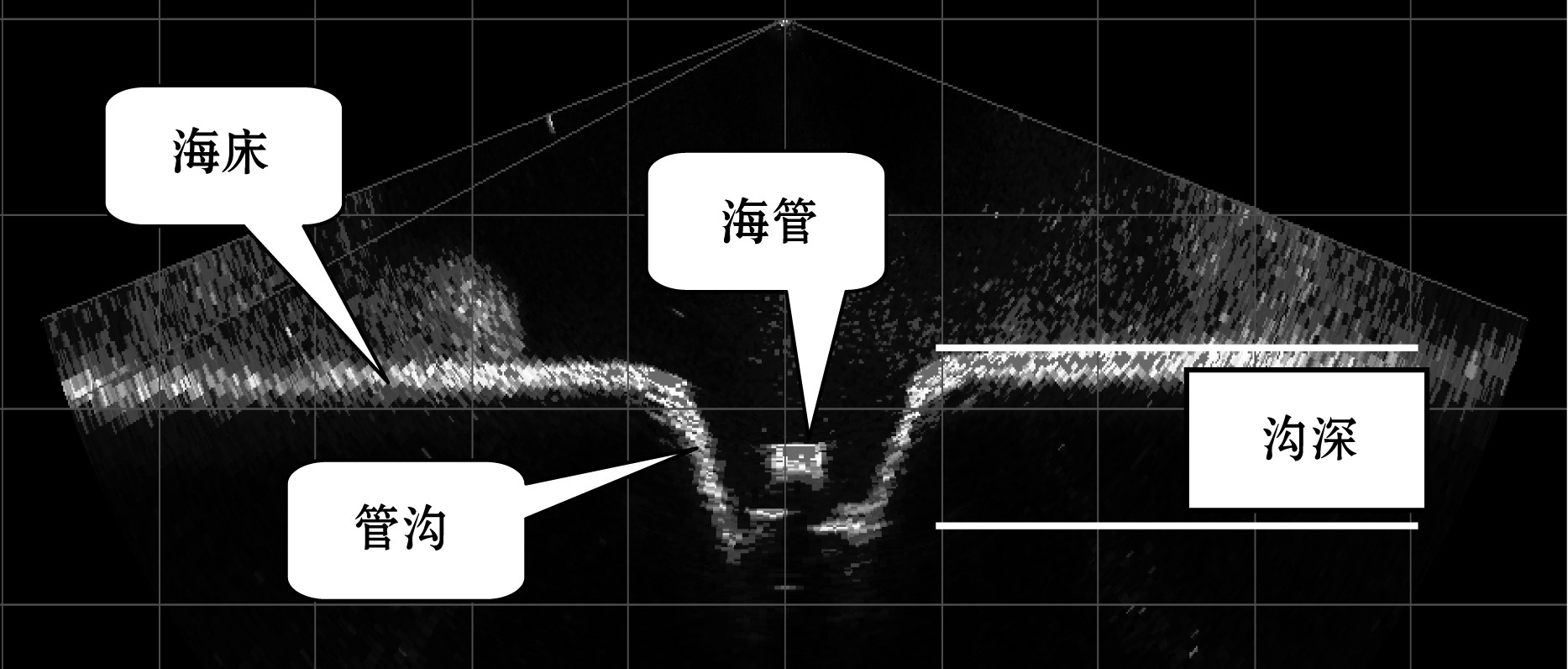
图1是本次挖沟施工时,按以上内容设置后的声呐扫描图像。图像中可清晰看出海管位置和管沟深度。
图1 某海管挖沟施工声呐扫描图像
4 、声呐在挖沟机上的安装位置设置
一般情况下,挖沟机上至少安装前后两套声呐(图2)。前部的声呐主要探测海管的位置,后部声呐除了探测海管位置,更重要的作用是扫测已开挖的管沟深度,该数据是判断挖沟质量的重要依据。
图2 某型挖沟机声呐安装位置示意图

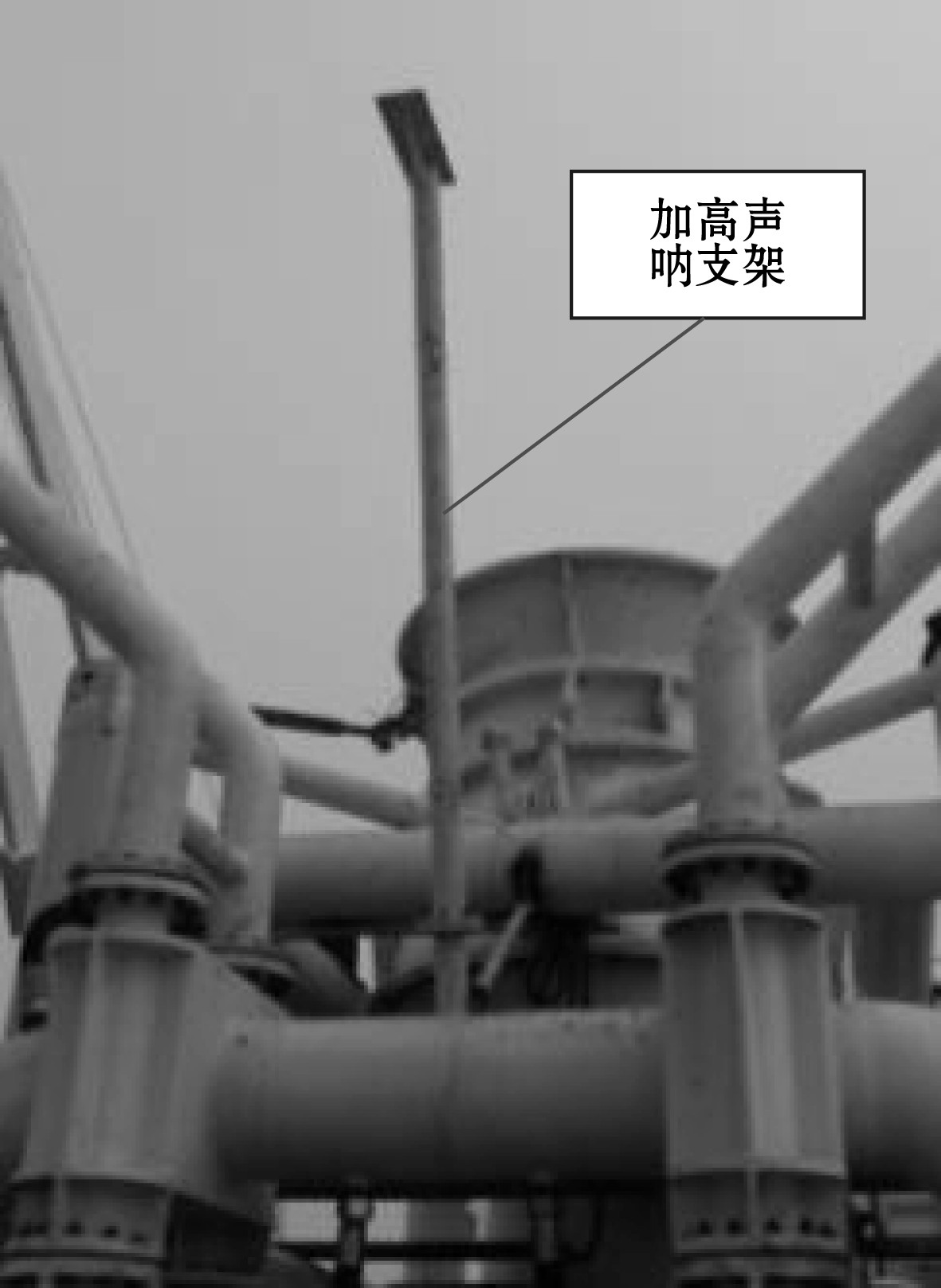
前后声呐均安装在挖沟机顶部,施工时声呐距海床高度约3 m。若安装高度过低,将影响声呐扫描范围,无法探测到海管两侧海床。当进行大深度挖沟施工时,管沟又宽又深,此时需要焊接安装额外的声呐支架,将声呐加高(图3),使其位置高出海床后方可以探测管沟及两侧泥面情况,便于判断管沟开挖深度。
图3 加高声呐支架示意图
声呐探头属于精密设备,但受其原理限制,安装位置必须暴露在海水中。实际挖沟施工时,水下情况复杂。尤其是在首次挖沟的海管路由附近,经常出现废弃渔网,容易损坏不停转动的声呐头换能器,而维修声呐头耗时长且费用高。因此为降低声呐头的故障率,目前新型声呐头的换能器均安装在一个充油的密闭环境中。且为了更好保护声呐,在挖沟机声呐支架外部,设计了门型防护框架,有效避免了施工中磕碰声呐头(图4)。
图4 挖沟机声呐防护框架

5 、未来挖沟机声呐应用探索
目前,挖沟机配置的声呐主要是单频剖面声呐,该声呐扫描成像清晰易识别,但当海管上方被浮泥覆盖后,该类型声呐无法观察到海管位置,给施工带来不便。
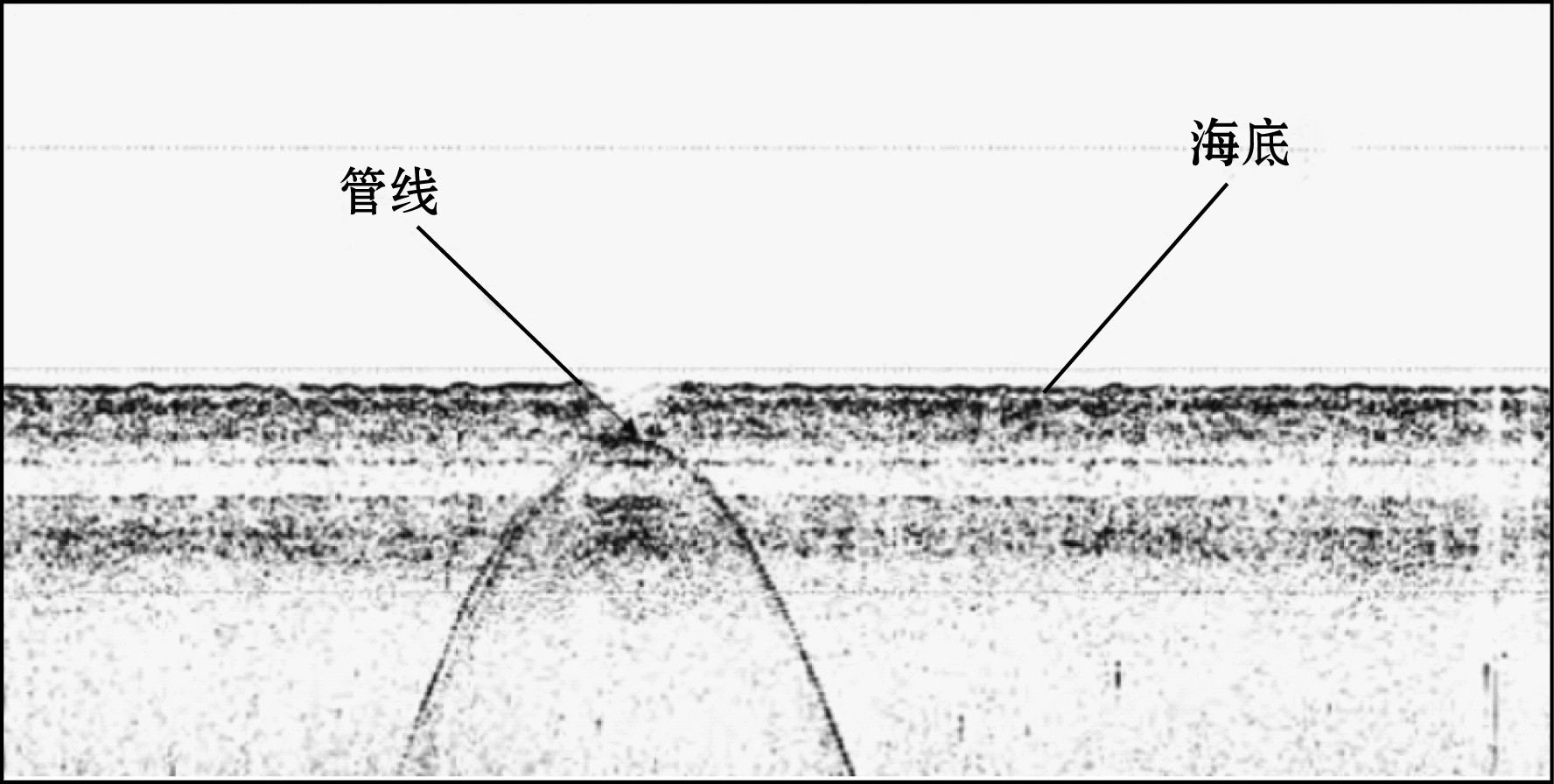
浅地层剖面声呐采用低频声波穿透地层的原理,通过换能器向水中发生声波,声波经过海水传播到达海底,一部分声波经海底反射回来,另一部分声波则穿透地层,继续向下传播,经过处理显示出地层的剖面图。当声波遇到被掩埋的海管时,将会形成明显的反射图像,以此判断海管位置和被掩埋深度(图5)。
图5 浅地层剖面声呐扫描图像
6 、结束语
目前,国内有多家从事海底管道后挖沟施工的工程公司,所采用的声呐类型基本相同,各公司都在努力尝试不同声呐配置方案,使扫描效果更好、成像更清晰。目前还没有浅地层剖面声呐直接安装在挖沟机上的成功应用案例,下一步将根据挖沟机声呐技术发展情况,适时开展此类应用探索。
参考文献
[1] 张伟,孙伯娜,王朝,等.海底管线路由探测方法研究[J].港工技术,2015,52(6):111-113.
[2] 王素红.声呐技术及其应用[J].现代物理知识,2009(6):40-42.
[3] 林锋,唐锁夫.声呐换能器的可靠性及维修研究[J].科学与信息化,2019(2):93-94.
[4] 王炳和,李宏昌.声纳技术的应用及其最新进展[J].物理,2001(8):491-495.
[5] 董足熙,胡佳俊.声呐技术在航道整治中的应用[J].中国水运,2016,37(3):54-55.

被称作拓扑绝缘体的材料其能带结构具有特殊的拓扑性质,内部为典型的绝缘体,但其表面具有传导电流的特性,因而可以用在一些特殊的领域。新加坡的一个团队提出了一种针对声波、具有类似特性的结构:这个结构会引导声波在表面一定区域内单向传播,同时那些在...