应用物理学论文

摘 要: 设计了悬臂梁振动引起的微多普勒频移实验系统.采用10.525GHz的X波段雷达模块发射和接收电磁波, 采用AD620放大雷达回波毫伏级信号, 采用NI-6009数据采集模块与LabVIEW软件对回波信号采集、滤波、加窗和频谱分析, 采用压电传感器验证雷达测频结果.实验结果表明:悬臂梁的有阻尼自由振荡对雷达波产生频率调制作用, 其微多普勒频谱图由相邻间距为固有频率的谱线对构成.
关键词: 微多普勒效应; 目标振动; 特征识别; X波段雷达;

Abstract: A micro-Doppler frequency shift test system caused by the vibration of the cantilever beam was developed.The 10.525 GHz X band radar module was used to radiate the electromagnetic wave and receive the echo wave, and the radar echo signal was amplified by the AD620 amplifier.The echo signal was collected, filtered, windowed and sampled by the NI-6009 data acquisition module and LabVIEW.The frequency measurement given by the radar was verified by apiezoelectric sensor.The experimental results showed that the radio echo signal frequency was modulated by the damping free vibration of the cantilever beam, and its micro-Doppler spectrum was composed of a pair of spectral lines with adjacent space of natural frequency.
Keyword: micro-Doppler effect; target vibration; feature recognition; X band radar;
利用多普勒效应探测目标的距离、运动速度和方位角的方法已被人们所熟知.近20年来, 雷达目标自身的微运动 (譬如装甲车的发动机振动、直升机旋翼的旋转以及导弹的圆锥运动) 对雷达回波信号产生频率调制的现象, 即微多普勒效应, 已引起业界高度关注.借助微多普勒效应, 可以获取雷达目标更多的运动学信息, 这在非合作军事目标的雷达识别领域有重要的研究价值[1-4].鉴于问题复杂性, 在该领域的研究还多集中于理论分析与数值仿真.为了让仪器科学与技术类专业的高年级学生以及研究生通过实验直观地认识微多普勒效应, 本文设计了目标振动引起的微多普勒效应观测实验装置, 可以直观地观测到微波雷达回波信号的时域图像与微多普勒频谱图像, 增强学生对微多普勒效应物理现象的理解.
1、 目标振动引起的微多普勒效应理论模型
为便于理论推导, 当目标与雷达的距离远远大于目标自身几何尺寸时, 可将目标作为质点.如图1所示, 雷达位于 (X, Y, Z) 空间坐标系的原点Q, 质点P在以O点为中心的区域附近振动, O点为参考坐标系 (U, V, W) 的原点.α和β分别为O点相对于雷达的方位角和俯仰角;αP和βP分别为质点P相对于O点的方位角和俯仰角.R0为雷达到O点的距离, Dt为质点P到O点的距离.做以下2个假设:1) R0Dt, 即目标与雷达的距离远大于目标自身振动幅度, 该假设符合微波雷达在工作中的大多数工况, 因此具有一般性.2) 参考坐标系原点O的方位角α=0, 质点P的俯仰角βP=0, 即质点P处于雷达的径向方向.
图1 目标振动微多普勒效应理论模型
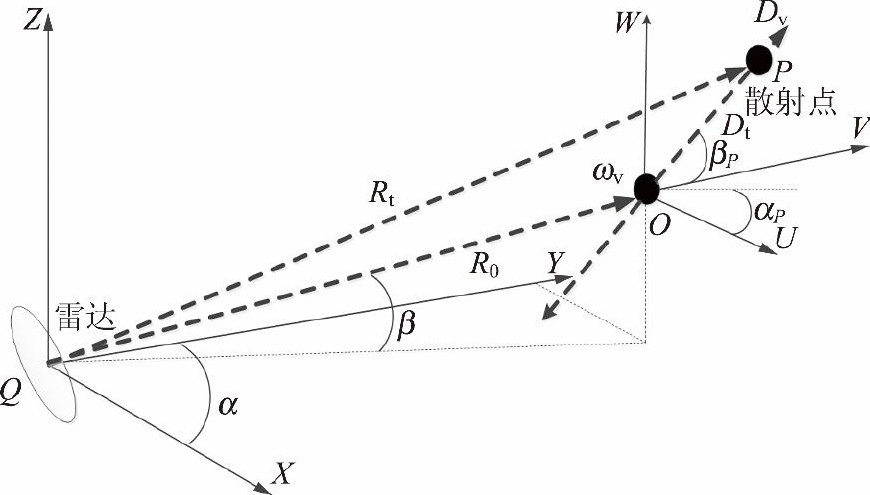
设质点的振动频率与幅值分别为fv和Dv, 则质点到雷达距离可以表示为
对 (1) 式求一阶导数, 可得质点相对于雷达的运动速度v (t) , 得到多普勒频移
10.525GHz微波雷达, 其波长λ=2.85cm.
雷达回波信号表达式为
式中, J1 (B) 和J2 (B) 为第一阶和第二阶Bessel函数.可见, 雷达回波信号的频谱是由围绕着中心频率且相邻谱线间隔为目标振动频率fv的谱线对组成.详细的理论推导见文献[1].
2、 目标振动引起的微多普勒效应实验设计
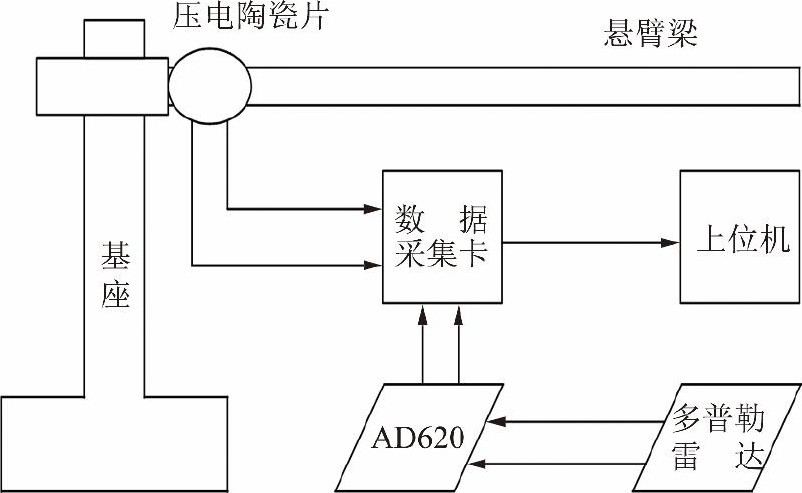
实验原理如图2所示, 悬臂梁的振动对多普勒雷达信号起到频率调制的作用, 雷达回波信号 (10mV量级) 经过精密仪用放大器AD620放大后输入NI-6009数据采集卡, 在PC机端编写LabVIEW信号采集与处理程序, 即可实时观测到悬臂梁振动对雷达回波信号的频率调制现象, 即微多普勒效应.
只有当目标的振动幅度与振动频率乘积足够大时, 才能有效地观测到微多普勒效应.为此, 采用10.525GHz X波段多普勒雷达探测器负责雷达信号的发射与接收.为了验证实验效果, 在悬臂梁梁末端粘贴PZT压电陶瓷片, 利用其压电效应采集悬臂梁振动信号.
图2 目标振动微多普勒效应观测实验示意图
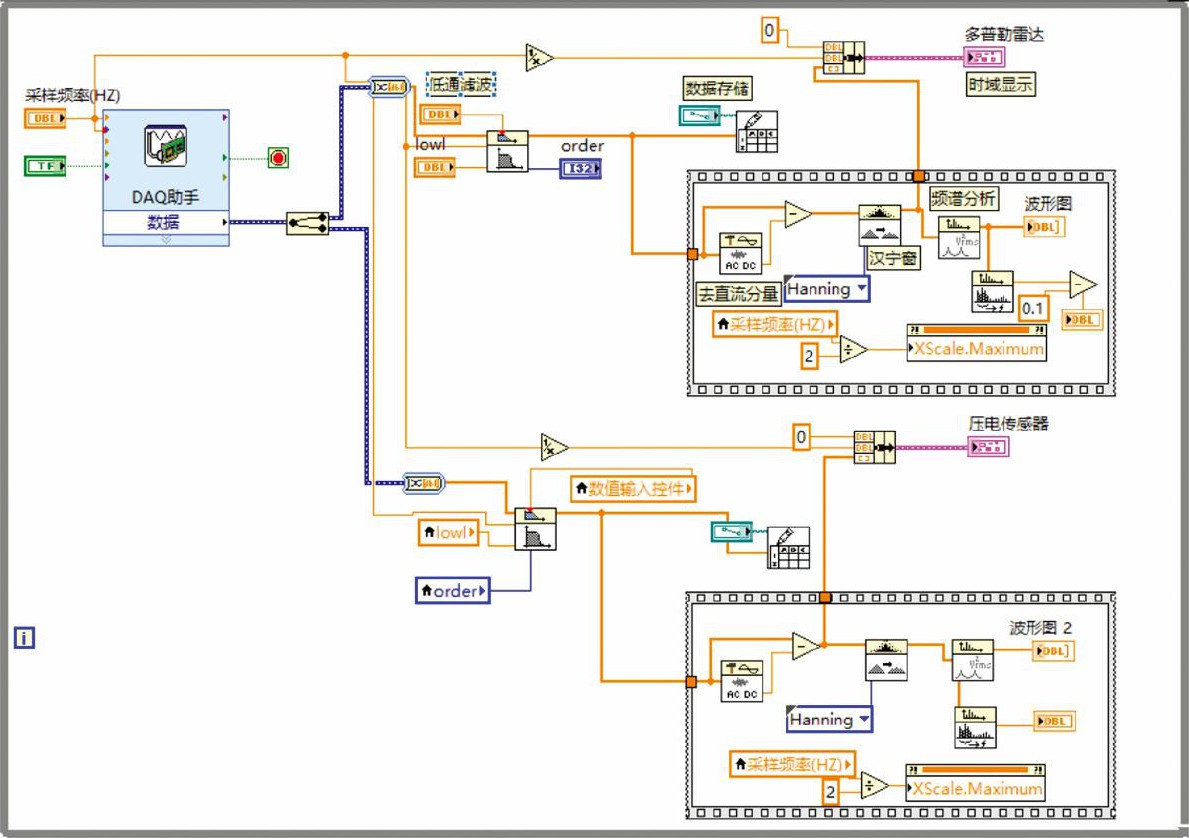
采用LabVIEW编制雷达回波信号采集与处理程序, 程序框图如图3所示.
图3 雷达回波信号处理LabVIEW程序框图
3、 实验结果与分析
实验用悬臂梁长200 mm、厚6.9 mm, 密度7.8×103 kg/m3, 杨氏模量200GPa.由振动力学理论[5]得悬臂梁的第1阶固有频率为14.02Hz.
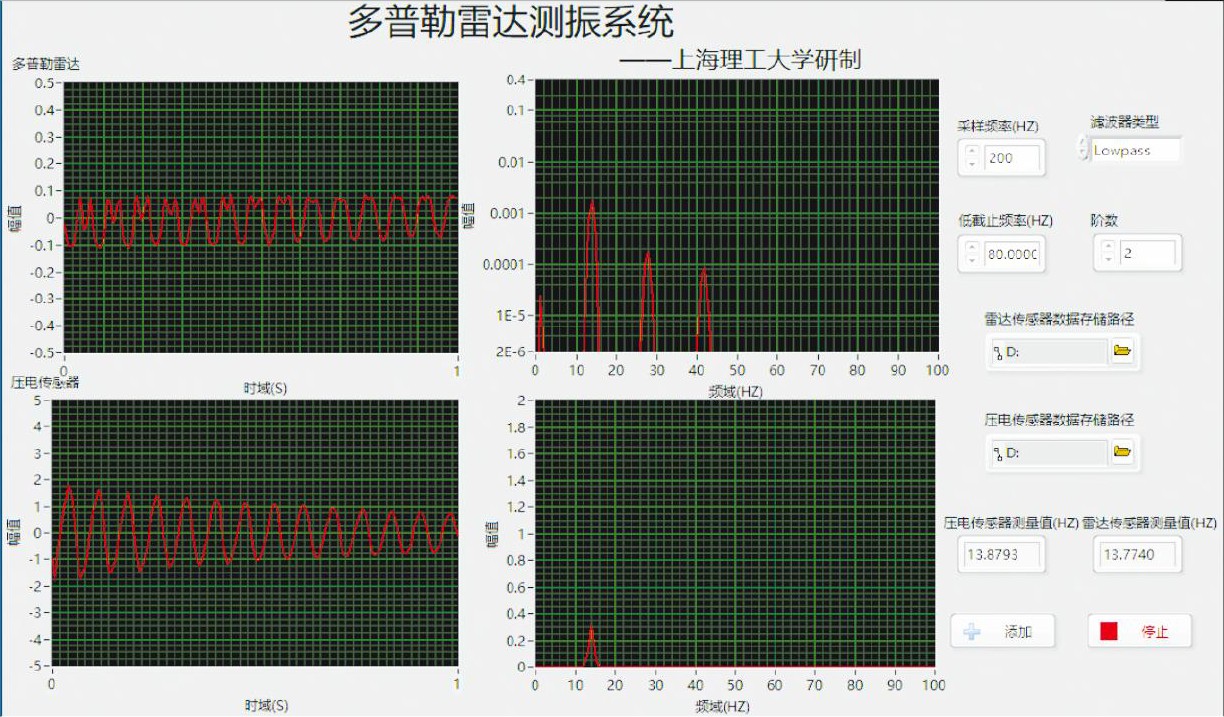
实验程序运行界面如图4所示, 可见:
1) 从时域上看, 多普勒雷达的回波信号有相邻的尖峰.
2) 频谱图像相邻峰值频率的间隔为固定值13.77Hz, 与式 (2) 的理论推导结果一致.
3) 压电传感器的测试值和微多普勒效应的测试值分别为:13.88Hz和13.77Hz, 二者较吻合.
测试值与理论计算值14.02 Hz存在一定偏差, 误差来源为:
a.悬臂梁在空气中做有阻尼衰减振荡而不是理想的简谐振动, 其幅值与频率乘积不为常量.
b.微多普勒信号本身为时变信号, 采用简单的FFT进行分析不够精确.
图4 振动微多普勒效应实验程序运行界面
4 结束语
与激光雷达相比, 在军事上常用的X波段雷达由于波长长, 要观测到由微振动引起的微多普勒效应较为困难.本文设计的目标振动微多普勒效应观测实验装置, 在实验教学过程中表现出较好的演示功能, 教学效果明显.同时, 该实验装置在雷达回波信号的时频分析方面还有优化的空间.
参考文献:
[1]Chen V C.雷达中的微多普勒效应[M].北京:电子工业出版社, 2013.
[2]贠乐应, 吕军, 李彤, 等.基于改进履带式车辆微动模型的雷达微多普勒效应[J].装甲兵工程学院学报, 2017, 31 (4) :93-99.
[3]王云鹏, 胡以华, 郭力仁, 等.基于微多普勒效应的旋翼弦长激光探测方法研究[J].光子学报, 2017, 46 (7) :0712003-1-10.
[4]王宝帅.基于微多普勒效应的空中飞机目标分类研究[D].西安:西安电子科技大学, 2015.
[5]孙玉国, 陈耀闯.2.4GHz无线振动测量系统的研制[J].仪表技术与传感器, 2010 (8) :50-52.