大学论文

智能小车毕业论文范文第五篇:图像处理支撑下智能小车的研究与实现
摘要:智能小车系统的构建,必须要从控制电源、路径、驱动、转向、速度等多方面实施处理,基于图像处理的智能小车设计,必须要考虑到智能小车的每个模块的硬件和软件部分。在一定程度上,要实现智能小车系统设计的简易化,第一采集高标准化,特定点采集准确化、传输准确化,以此实现基于图像处理的智能小车的研究。这样才能够真正提高智能小车设计的精准化、有效化。基于此,本文以图像处理下的智能小车的研究与实现为题展开分析与讨论。
关键词:图像处理;智能小车;研究与实现;
作者简介:陈金伟(1989-),男,福建泉州德化,本科,助教,研究方向:新能源技术及信息化教学。;
基金:福建省中青年教师教育科研项目(JZ180974);
1 引言
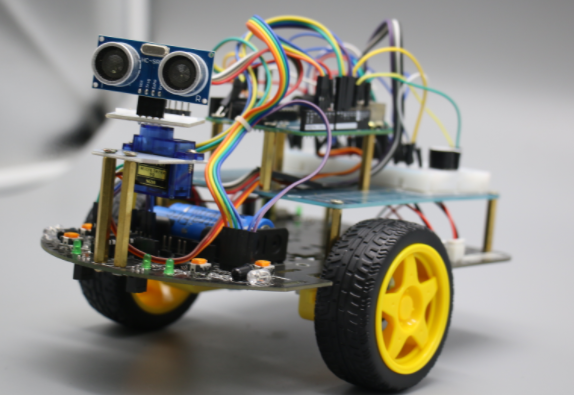
为了保证小车能够快速稳定地行驶,必须要根据图像传感器所采集到的信息,快速地对路径进行判断,并且根据速度检测模块反馈行驶状态,进而能够将信息传递给伺服电机,使其得到相应的控制。并且传感器在实施监测时,需要迅速地对各类信息进行处理,因此各模块的紧密配合度是智能小车快速行驶的关键。智能小车的智能模块主要是完成对各种信息的收集和处理,并且做出决策输出控制信号。智能小车的路径检测是在智能小车的前端安装一个CMOS摄像头以及视频分离模块,主要是对赛道上的一些情况进行实时的监测与识别,进而为小车的速度和转向提供依据。转向模块是通过反馈路面的信息和小车的当前状况,经过控制器的一系列的计算,进而将计算结果传向控制系统。速度检测模块是采用一对红外发射与接管配合的光电码盘来实现的,如此它对信息进行实时监测,将信号反馈给控制器。调试辅助模块是为了方便小车调试,主要是采用通讯设备数码显示8位拨码开关的辅助工具。通信设备可以采集到的赛道图像信息传输到PC机上,对采集的图像进行直观的分析。

2 图像处理技术
2.1 图像增强
图像增强的目的是改善图像的视觉效果,它是各种技术的汇集,还没有形成一套通用的理论。常用的图像增强技术有对比度处理、直方图修正、噪音处理、边缘增强、变换处理和伪彩色等。在多媒体应用中,对各类图像主要进行图像增强处理,各类图像处理软件一般都支持图像增强技术。
2.2 图像恢复
图像恢复的目的是力求图像保持本来面目,用来纠正图像在形成、传输、存储、记录和显示过程中产生的变质和失真。图像恢复必须首先建立图像变质模型,然后按照其褪化的逆过程恢复图像。
2.3 图像识别
图像识别也称模式识别,就是对图像进行特征抽取,然后根据图形的几何及纹理特征对图像进行分类,并对整个图像作结构上的分析。通常在识别之前,要对图像进行预处理,包括滤除噪声和干扰、提高对比度、增强边缘、几何校正等。图像识别的应用范围极其广泛,如工业自动控制系统、指纹识别系统以及医学上的癌细胞识别等。
2.4 图像编码
图像编码的目的是为了解决数字图像占用空间大,特别是在做数字传输时占用频带太宽的问题。图像编码的核心技术是图像压缩。对那些实在无法承受的负荷,只好利用数据压缩使图像数据达到有关设备能够承受的水平。评价图像压缩技术要考虑三个方面的因素:压缩比、算法的复杂程度和重现精度。
2.5 图像分割
图像分割是数字图像处理中的关键技术之一。图像分割是将图像中有意义的特征部分提取出来,其有意义的特征有图像中的边缘、区域等,这是进一步进行图像识别、分析和理解的基础。
2.6 图像描述
图像描述是图像识别和理解的必要前提。作为最简单的二值图像可采用其几何特性描述物体的特性,一般图像的描述方法采用二维形状描述,它有边界描述和区域描述两类方法。对于特殊的纹理图像可采用二维纹理特征描述。随着图像处理研究的深入发展,已开始进行三维物体描述的研究,提出了体积描述、表面描述、广义圆柱体描述等方法[1].
3 智能车图像采集模块
图像采集模块,主要是由摄像头、信号分离电路等部分组成。基于图像处理的智能小车采集模块,可以利用摄像头的特点以及赛车行走的路线,进行监控与获取相应的信息。除此之外,还能够以隔行扫描的方式,对不同的特殊点进行扫描,传送到处理部位,再通过图像的传感芯片转化为电压值,如此再通过电压值实现信号的输出,如此能够真正实现图片扫描信息的传递。电压的高低反映了图像的变化,能够监测到小车运行过程当中的差异性。
4 智能车速度采集模块
在智能小车的设计过程当中必须要注重速度采集模块,速度检测必须要以重量轻、体积不大的传感器来构建。目前可以通过以下措施实现速度检测模块的构建。首先,要选择好传感器配合的石刚将其镶在小车上面,再在其附近安装原件,就可以检测其磁场的变化,这种传感器质量轻,体积不大,监测到的变化较为准确,也不会增加车子后轮的负载量,但是它容易受到磁场的干扰,容易损坏齿轮。其次,光电编码器也是另外一种速度采集仪器,它可以安在主驱动齿轮上,靠传递获取信息,该方案的优势就是信息准确、精度高,但是会增加后轮的负载量,而且其体积偏大,所以会导致车重增加。其三,光电传感器能够镶嵌在齿轮之间,对齿轮之间的电脉冲进行检测,由此获得速度信息。而且它也可以对齿轮进行打孔,通过接受到的红外光产生脉冲信息,获取速度信息。此方法体积小,不会增加后轮负载,但是容易受到光电管体积的限制。
5 智能车转向控制模块
智能小车的转向控制模块是智能小车的一个重要部分,小车灵巧的转向是能快速转弯的基础,所以如何加快投机的响应速度是转向控制模块的关键问题。在实际操作当中要对投机的安装方式进行调整和了解,这样才能够进一步确定转向控制模板的效用。首先,要对投机的机械结构进行分析,投机一般是由托盘、减速齿轮组、位置反馈电位计、直流电机等多部分组成,其中小型的直流电机又是原始动力。其次,要明确投机的工作原理。投机是一个典型的闭环反馈系统,在接受信号后能够通过转化获得电压差,进而使得电机的转速能够得到控制。其三,要了解投机的控制方式。它通常是由转向角度和输入投机的正脉冲的关系控制的,所以当输入投机的正脉冲的宽度能够得到控制时,就能够控制投机的转向位置,进而使得投机受到控制。
6 智能小车辅助调试模块
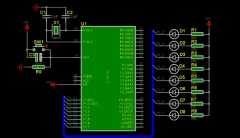
辅助调试模块分为状态显示模块和在线调试模块。其中状态显示模块是显示智能小车在实际道路中的调试情况,能够实时地观察小车的各种状态,也能够将小车进程中的各种信息进行显示,它通常会使用LCD显示、LED数码管显示、发光二极管显示。其中考虑到LCD的费用较高,而发光二极管显示的信息量较少,所以通常会选用LED数码管显示来自实时的监控小车进程中的各种状态。其次,在线调试模块是在实际赛道调试中,不断修改的控制方案,由此必须安装此类模块,它可以在智能小车的控制系统当中加一个8位拨码开关,提高小车的调试进度[2].
7 图像处理技术在自动驾驶中的应用
环境感知技术是利用图像技术获得车身周围的环境,对障碍物的信息进行了解,在必要的条件下进行刹车制动,保证汽车的行使安全。在汽车内部的摄像头中利用图像处理技术,可以有效地对周围环境进行了解,车载摄像头根据周围的情况进行分析,将情况传输到电脑,电脑根据环境以及驾驶员需要进行路线规划处理。图像处理技术的应用可以对信息进行有效整合,减轻了驾驶员的操作难度。在自动驾驶中,进行图像处理技术,可以有效提高汽车行驶的安全性,保证人民生活的更加便利。总体上来说图像处理技术是在原有的视屏分析,图像处理上进行的优化。
8 交通信息采集
在智能化的发展过程中,智能交通系统的应用可以有效地控制交通出行。在交通信息采集中利用图像处理技术,可以对交通情况进行分析,包含车流量、车速、车型分类,以及车辆密集度进行分析,确保交通的顺畅。正确地使用图像处理技术,对交通信息进行采集,将采集的信息进行分析处理从而做出更加正确的判断。在交通拥堵的情况下,图像处理技术可以有效地更改驾驶路线。在智能交通系统中,信息采集技术的有效进步是建立在图像处理技术的优化,在优化技术的同时提高交通安全性和效率。
9 结语
基于图像处理技术进行智能小车的建设,利用计算机视觉技术提取数字图像中的有效信息,克服了传统的信息模糊的现象。在整个使用过程中,图像处理技术可以有效地进行交通信息的收取,在交通信息的采集中,可以对路况进行了解,给予驾驶员更好的路线,同时在无人驾驶中,提高车辆行驶的安全性。简单来说,图像处理技术推动了车辆智能系统的进步,利用传感器等设备技术,提高车辆行驶的安全,以及对车辆进行有效控制。
参考文献
[1]张铮,范若怡,言若宁,易环基于图像处理的智能小车无线远程灭火[J]实验室研究与探索,2018,37(1):33-37.
[2]孙晓峰基于图像识别的智能小车障碍物检测方法研究[D]昆明:昆明理工大学,2017.
以实现交通灯的智能控制。提出了根据单位面积车辆密度作为交通参数以调整交通灯时间的方案...
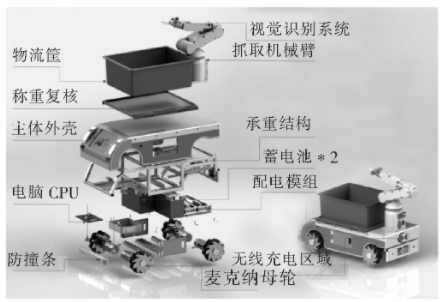
随着我国物流企业、电商企业迅速发展,各大生产企业纷纷大力发展自己的仓储物流系统,但由于目前的仓储分拣货物系统智能程度低....

为了提高尽可能推动企业朝着即时性、互动性、全球性的方向发展, 需要在.NET技术的基础上加大对需求链管理 (DCM) 软件的研发, 以保证其更好的实现, 提高企业与客户之间的利益。...
智能小车是一种通过自身体系内部的传感器感知和获取外部车辆运行的环境信息以及自身运行状态的一种智能车辆,这种车辆可以在真实、复杂的运行环境中自主驾驶....
我国存在视力障碍的人数位列世界前茅,政府关爱视力障碍人群,设置了全世界长度最长、分布最广的盲道,但日常生活中我们却很少看到他们走在盲道上。...