航空技术论文经典范文10篇之第三篇:探索机器人技术在航空维修中的应用
摘要:机器人技术的运用,既可以使车间管理严格化,自动化工位得以增加,空间利用率得到了充分的优化,又能够保证生产效率与生产水平的提升。以航空领域为立足点来讲,维修供应商需要应用机器人技术,在遵循高级安全标准的基础上,完成相应的检测、测试和修理工作,从而确保飞机安全性和稳定性得到满足。鉴于此,本文主要围绕机器人技术在航空维修中的应用予以探索。
关键词:机器人技术; 航空维修; 应用探索;
Abstract:
The application of robot technology can not only make the workshop management strict, the automation station be increased,and the space utilization rate be fully optimized, but also can improve the production efficiency and production level. Based on the aviation field, maintenance suppliers need to apply robot technology and complete the corresponding testing, testing and repair work based on advanced safety standards to ensure the safety and stability of the aircraft are met. In view of this, this paper mainly focuses on the application of robot technology in aviation maintenance.
Keyword:
robot technology; aviation maintenance; application exploration;
0 引言
航空维修简单而言就是将达到特定寿命周期的飞机作为主体,并在维修基地开展系统性维修的一种活动。其与航空制造厂飞机从无到有这一制造模式有着本质性区别,航空维修客观来讲是集修和造为一体的综合性的模式,通过维修使其零部件性能得以恢复是其侧重点所在。近年来,在飞机数量持续增长的背景下,对维修质量和维修周期都提出了较高的要求,传统航空维修生产方式也面临着前所未有的挑战,为了更好地应对挑战,确保自身的可持续发展,许多航空维修企业也加大了探索力度。
1 机器人技术概述
机器人可以归入半自助或全自助的工作机器领域当中,是集现代化制造技术、材料技术和信息化技术为一体的智能制造产品[1]。通常来讲,机器人可以分为基于制造环境下所应用的工业机器人和基于非制造环境下所应用的服务机器人两种。就服务机器人而言,又可以根据应用环境不同将其细分为为家庭或为人服务的机器人和特殊环境下的专业服务机器人。应用在航空领域的机器人则属于后者。
虽然人们对于机器人保持着极强的好奇心和想象力,但是不可否认的是,实际机器人与人们期许的机器人状态有很大的差别。第一,机器人是多学科体系的整合,不仅需要将硬件和软件等各学科知识融入到其中,而且也需要依赖较大规模的研发队伍,并投入大量的时间与精力。第二,现阶段的工业机器人运转环境主要以结构化运转环境为主,对于服务机器人来讲,只能完成一些不具备难度的任务,而特种机器人的特殊项目通常需要依赖遥控才能得以完成。
2 航空维修的特征分析
航空维修与航空制造有很大的区别,航空维修过程中的特征主要有以下几点:第一,航空维修过程中大部分工作都是围绕飞机外观缺损、表面缺陷和几何尺寸测量等方面开展的,然而,现下的这些工作主要还是依赖于人工完成,这也体现出当前航空维修自动化程度和工作效率低下的客观事实,将基于机器视觉的自动检测技术应用到其中显得尤为迫切。第二,品种多、小批量是航空维修零件中时长存在的问题,既不能对其进行简单的归类划分,也不能在特定方式下对其进行批量化处理,这就使得在维修过程中需要针对单一零件进行个性化修理,这给机器人技术柔性化程度也提出了更高的要求。第三,飞机整机拆除与除漆也是航空维修过程中遇到的难题,此过程不仅没有囊括在飞机制造工序内,而且其与飞机制造也有着突出的差别,在机器人技术引入过程中无法找到可以为其提供参考和借鉴的资源。第四,航空维修行业间存在利益竞争关系是不可避免的,然而,就行业链下游的航空维修企业来讲,其在获取产品数模信息等大量原始信息方面相对困难,相应的机器人技术应用也会受到连带影响。
3 机器人技术在航空维修中的应用
3.1 工业机器人在航空机械零件特殊修理过程中的应用
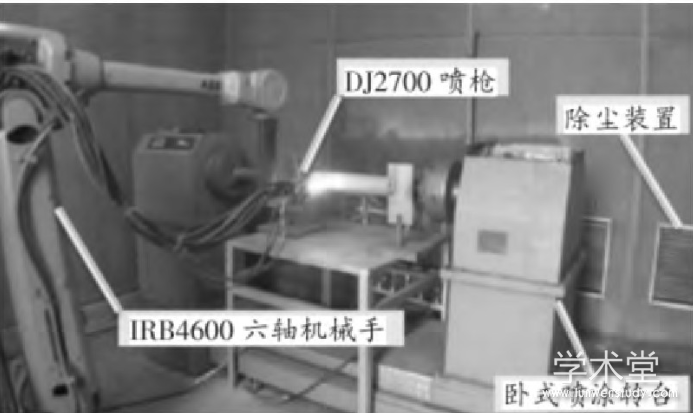
就航空维修这一过程而言,无论是航空零件缺损部位的低热输入焊接等修复目标的实现还是恢复表面尺寸等目标的实现,都可以应用激光熔覆技术和热喷涂技术。然而,由于受到零件外形不同且受损部位不同等方面的影响,使得上述方法运用时存在一定的难度。而对工业机器人高度柔性化进行充分利用则可以使上述难题得到有效的解决。如图1、图2所示。
3.2 机器视觉技术在零件外观与尺寸检测上的应用
在围绕某型飞机进气道防护栅开展维修工作时,需要对将近十万个小孔进行裂纹检测,而检测过程中则需要通过目视来完成,如图3所示。由此可以看出,此类工作不仅任务量巨大,而且在检测过程中也极易受到外界因素的干扰与影响,修理质量也无法得到保障,裂纹漏检漏修等现象也时有发生,进而也会对飞机修理质量产生不利影响。想要使此问题得到充分且有效的解决,可以将机器视觉检测的方式应用到检测过程中,在机器视觉依托下实现以往摄取目标向图像信号的转变,并将转换完成的图像信号提交到图像处理系统中,这样图像处理系统就会依赖于系统性的图像处理技术完成对防护栅裂纹的识别,整个过程也都能实现自动化。
图1 激光熔覆维修中工业机器人的运用
图2 热喷涂维修中工业机器人的运用
图3 防护栅一角的裂纹展示
在针对橡胶零件实施检测时,由于受到橡胶本身具有弹性等影响,所以在对其几何尺寸进行测量时难度较大,实施效率也相对较低。对此,可以将OGP影响测量系统运用到其中。此系统囊括了精密光学技术、先进电子技术等多个技术在内,可以使任何零件的影响得到清晰化、精准化的展现,为后续测量提供精准的参考依据,保证测量效果。此系统主要是在机器视觉和图像处理技术结合运用下对橡胶零件予以的测量,且测量过程是非接触式的,将其与单一点接触系统对比可知,不仅其零件数据更为详细,而且以往存在于小型橡胶零件无法准确测量的问题也得到了有效的解决。
3.3 全向移动技术在飞机大部件运输装配中的应用
飞机大部件运输装配是航空维修过程中难度较大的问题,且在运输装配时想要更好地与配套工装实现调整与对接,还需要有充足的时间保障。对此,主要以麦克拉姆轮全向移动技术为基础,对运输装配全向车进行了研究与开发。就此车而言,其不仅应用了速度伺服技术,而且也囊括了以多轴运动精确控制在内的多项先进技术,以此确保车辆基于平面状态下的三自由度任意方向的精确移动。这也给航空修理厂发动机装备和武器装备系统运输与装配提供了重要的技术支撑,且应用效果可观。
4 机器人技术在航空维修中应用需要突破的关键技术
4.1 快速逆向测量技术
客观来讲,大部分工业机器人操作时,想要对机器人运动轨迹与路径进行计算,需要在目标产品几何外形数据基础上来进行。然而,在航空维修过程中,许多上游企业会对技术进行封锁处理,碍于此方面的影响,不仅会导致目标产品原始图纸和数字化几何模型的缺失,而且获取几何外形数据信息时,也只能借助专业逆向测量设备对外形进行逆向测绘来获得[2]。因此,如何以快速逆向数据处理和专业编辑技术的整合为载体实现对合格三维数模的获取是当下较为关键的技术。
4.2 机器视觉技术
机器视觉技术是指将机器人技术与照相测量技术整合起来的一种技术形式。通过上文阐述可知,航空维修过程中存在大量的目视检查工作,这也决定了其对于机器视觉技术需求的迫切性。从理论角度来讲,所有依靠目视方式来检查的内容,均能借助机器视觉技术来替代,且无论是质量还是效率方面都要远远高于目视模式。尤其对于效率方面来讲,其较以往传统目视方式提升是多倍的。就这一过程中涉及到的图像处理和后续软件开发定制而言,是构成该项技术的核心与关键,对此,也要将此作为需要突破的核心。
4.3 离线编程与仿真技术
机器人执行命令主要是靠程序来控制的,对传统示教编程进行审视可以得知,精读不高、效率低下是其最为突出的特征,同时,在完成与目标产品几何模型数据对接任务时也存在较大难度,这都是阻碍航空定制化维修过程中应用此项技术的重要阻碍[3]。对此,要确保机器人始终处于精确性和柔性化控制当中,确保其与各种限制条件的契合性并顺利应用,规避有可能发生的碰撞与干涉,着重促进编程效率的提升,因此,深入研究和应用机器人离线编程系统尤为迫切。
4.4 高精度测量定位技术
整机除漆、喷漆是航空维修中的特殊过程,其工作范围也远远大于主流工业机器人的工作半径,具有作业区域大等特征。同时,其对于精读要求也较高,这是现有工业机器人不能达到的。鉴于此,就要借助高精度测量装置的辅助作用,实现对机器人末端执行器的有效引导,以此促进运动轨迹伺服控制的实现[4]。从现阶段来讲,除了可以对传统激光跟踪仪予以运用外,还可以将室内GPS进行充分的应用,尤其对于大尺寸测量来讲,其适用性更强,一方面能够以整体作业空间为范围建立测量场,另一方面还能在满足现场需求的基础上,使机器人数量有所增长的同时减少其额外测量费用,相应的在固定工装投入的费用也能得到有效的控制。
5 结束语
航空维修与航空制造有着本质性区别,在引进和应用机器人技术时,要改变以往照搬照抄、盲目求新的态度,而是应该将既有的发展成熟的机器人技术作为探究的着重点和方向,并加大其最佳适用区域的探索,这也是拓宽机器人技术在航空维修中的深度的有效方法。从实际角度而言,虽然航空维修领域机器人应用还有待发展与完善,但是近年来机器人在航空领域应用获得的良好效果与成功案例都向我们展示了其具有的光明前景。未来,航空维修市场竞争也会逐渐激烈,以先进的机器人技术为基础,促进企业综合实力的提升,是当下航空维修行业的重要发展方向。
参考文献
[1]舒送,赵桂芳,张小辉.机器人技术在航空维修中的应用探索[J].机械设计与制造,2018(01):248-250.
[2]Alex Derber,张志昌.机器人在航空维修领域的应用[J].航空维修与工程,2019(04):25-27.
[3]邓国智.航空维修中机器人技术的应用方法[J].粘接,2019,40(07):127-129.
[4]张兴刚,王芝桥,房灵申,孙元,于鹤霖.航空环形件加工机器人端拾器的结构设计[J].组合机床与自动化加工技术,2019(08):23-25,48.
点击查看>>航空技术论文(优秀范文10篇)其他文章