机械工程论文

摘要:变电站智能巡检机器人系统以自主或遥控的方式,在无人值守的环境中,完成对室外高压设备进行红外温度监测和仪表液位的图像识别等任务,替代人工完成巡检中遇到的繁、难、险和重复性的工作。本文介绍了变电站智能巡检机器人的系统组成,重点探讨了巡检机器人的关键技术,包括行走机构、导航控制技术、视觉伺服校正技术及图像识别等技术,展望巡检机器人的发展方向及应用前景,为变电站巡检机器人的更新迭代提供参考方向。
关键词:变电站; 巡检机器人; 导航; 图像识别; 关键技术;
目前,全国多数变电站电力设备巡检仍为人工巡检方式。巡检人员的巡视内容主要包括设备温度、仪表表计读数、或高压电缆的接头状态等,巡视内容固定单一,巡视人员工作效率较低[1]。随着电网安全运行的要求越来越高,变电站使用智能化设备的必要性也越来越强,能够使用一套既能对变电站设备自动进行数据采集,又能对所得数据进行全面综合分析和比较的智能化无轨机器人系统,是非常必要的。
近年来,随着变电站巡检机器人持续深化应用,机器人已可代替人工完成变电站高压变电设备的所有巡检作业。采用变电站巡检机器人可提高变电站的数字化程度和全方位监控的自动化水平,有效保障设备安全可靠运行,提高安全生产工作效率和质量[2]。
1 变电站巡检机器人系统组成
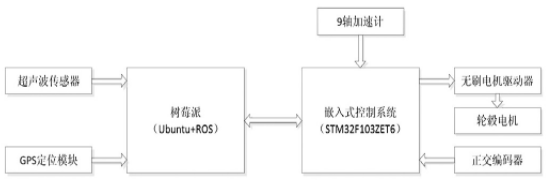
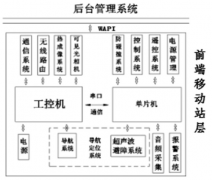
变电站智能巡检机器人系统分为三层体系架构,分别为:车载子系统、本地监控后台及远程集控后台。车载子系统通过无线局域网与本地监控后台进行数据、图像、视频等信息交互,远程集控后台通过申请的电网专网对本地监控后台、车载子系统进行任务下派、状态监控及数据管理。车载子系统由控制单元、导航单元、行走机构、供电单元及传感单元组成,其中传感单元包括云台、可见光相机、红外热像仪及拾音检测装置。

2 关键技术分析
2.1 行走机构
行走机构是巡检机器人执行巡检任务的基础,控制机器人前进、后退,转弯及停止动作,行走机构根据移动方式的不同,可分为履带式、轨道式和轮式三种,分别应用于不同的场景,其中轮式运动机构在变电站巡检机器人中被广泛使用。
(1)履带式行走机构。履带式行走机构[3]可以在凸凹不平的路面上行走,也可以攀爬台阶、翻越沟壑,具有较强越障能力,适用于松软或泥泞的地面,对复杂地形的适应能力强,但由于没有自位轮和转向机构,履带式行走机构只能靠左、右两个履带的速度差转弯,转弯过程中不仅会出现横向滑动,在前进方向上也会产生滑动,转弯阻力大,无法准确地确定转弯半径,同时转弯速度较慢,灵活性较差,对于拥有狭窄路面和盖板路的变电站场所不太适用。
(2)轨道式行走机构。轨道式行走机构是在固定的轨道上移动的装置,根据规划的路线预先敷设轨道,机器人可以移动到轨道上任何位置,具有定位精度高,移动安全、易于控制等特点,但由于轨道固定,机器人运行轨迹单一,灵活性较差,适用于变电站控制室、配电室等环境。
(3)轮式行走机构。轮式行走机构具有移动平稳、能耗小,以及容易控制移动速度和方向等优点,根据驱动类型分为两轮驱动型和四轮驱动型,相比两轮驱动,四轮驱动具有更强的驱动能力和转弯灵活性,为了适应变电站中的石板路、水泥路、电缆沟盖板、草地、石子路等多种不同的路况,已有电力企业推出四驱四转巡检机器人,通过增加转向机构,实现了机器人原地平稳转向,有效保护车体内部回路,延长车载设备部件的使用寿命,此外,行走机构配备独立悬挂减震系统,每侧车轮单独通过弹性悬挂于车身下,降低重心、减小车身振动和冲击,可实现自由穿行崎岖路面。
2.2 导航控制技术
导航控制技术是巡检机器人自主行走的基础,目前常用的导航控制技术有:视觉导航、惯性导航、激光雷达导航等。
(1)视觉导航。近几年,随着计算机技术和图像识别技术的迅速发展,视觉技术在机器人领域开始广泛应用,视觉导航就是利用一只或多只摄像机采集周围环境下的图像信息,通过图像技术提取图像中特征点信息,并通过不同帧之间的图像不断进行特征点匹配计算进行特征点跟踪,实现姿态变换,从而获得机器人在环境中的位置坐标,完成自主导航定位,但该方法数据量大、算法复杂、定位实时性较差,并且易受光线、烟雾及雨天的影响,因此,多与其他定位导航方式组合使用。
(2)惯性导航。惯性导航是一种不依赖于外界环境信息,仅依靠自身惯性元件获取车体运动参数的导航方法,通常采用陀螺仪和加速度计测量机器人加速度和航向角,将加速度对时间进行积分并变换到导航坐标系中,获得机器人的速度、偏航角和位置等信息,具有数据更新率高、短期精度高、稳定性好等优点,但由于导航信息要经过积分而产生,定位误差会随时间而累积,需要定期进行校正,消除累积误差,因此通常与其他导航方式组合使用。
(3)激光雷达导航。激光雷达导航是应用2D或3D激光雷达扫描周围环境信息形成激光点云数据,以第一帧数据为基础,依据后一帧点云数据叠加到前面帧点云数据的原则,进而形成全局地图,机器人自主运行时,激光雷达实时扫描的点云数据与地图进行匹配,确定机器人在全局地图中的坐标位置,根据目标点在地图中的坐标位置,规划一系列渐进目标点,控制机器人左、右两边车轮的速度,使机器人直线行走到目标点,完成导航。激光雷达具有测距精度高、受光线影响小、抗电磁干扰强,地面施工简单等特点,因此在无人驾驶汽车或智能巡检机器人中得到了广泛的应用。
2.3 视觉伺服校正技术
机器人定位导航精度和云台控制精度都存在一定的误差,在机器人执行巡检任务过程中,可见光相机调取相机参数获取设备图像时会出现设备并未在视场中心,甚至偏差视场,导致获取设备图像识别,由此出现了一种基于设备模板库的视觉伺服控制技术,依据机器人的云台预置位,驱动云台转动,调节相机焦距和倍率,形成自动巡检模式下大视场的设备小图,比对模板库中的设备小图,提取目标图像位置的像素差,计算视场中的水平及垂直角度偏差,控制云台转动,使目标向视场中心偏移,校正因导航和云台控制误差产生的目标点偏离,此校正过程虽然可以纠偏,但增加了巡检时间,降低了巡检效率,如何实现快速地伺服校正成为当前巡检机器人技术提升的重点。
2.4 图像识别技术
图像识别是巡检机器人的重要技术之一,决定了巡视电力设备的准确性。在调试阶段,利用搭载的红外热像仪、可见光相机采集红外图像、指针仪表图像、设备油位图像、刀闸、断路器等图像,并对采集到的图像信息进行处理建立设备模板库,机器人执行任务过程中,监控后台将采集到的设备图像与模板库中的设备模板进行匹配对比,最终获得设备识别结果。对于变电站环境下,有效应对光照变化、阴影、遮挡、低对比度、视角变化等因素的智能图像识别技术是巡检机器提升识别率的关键。
3 发展趋势
随着变电站向无人值班化及智能化方向快速发展,对变电站巡检机器人的需求十分迫切。未来变电站巡检机器人的研究目标是提高巡检机器人的智能性、运动灵活性以及高精度和配置简便的导航方式。其发展趋势表现在以下方面:
3.1 高速下精确定位导航技术
变电站巡检机器人为保证自主导航的稳定性、采集图像的高质量,在执行巡检任务过程中停车点的定位精度要求更高,实际应用中车体自主行走的速度为一般为0.6m/s,机器人执行任务过程中大部分的时间在“赶路”,致使整站巡检时间较长,因此需要大大提高自主巡检时车体的行走速度,同时保障机器人行走过程中导航的平稳性、停车时的精确性,研究一种高速下精确定位导航技术成为未来必然趋势,这将大大提高巡检的效率。
3.2 遇障智能处理技术
目前应用的巡检机器人在巡检任务过程遇到障碍物时,会立即停止并发出告警,障碍物一直不消除时,机器人会一直停止不动,需要运维人员人工干预,此种遇障处理模式智能化较低,不利于推广变电站的无人值守模式,因此需要研究一种遇障智能处理技术,保障机器人遇到障碍物能够智能分析处理,在机器人遇到障碍物停车时,应根据路面宽度及障碍物尺寸,形成多种遇障处理模式:(1)道路许可的情况下直接绕过障碍物;(2)道路不许可但有其他路线时,可选择其他路径继续执行巡检任务;(3)道路不许可也无其他路线时,机器人返回充电房,以此提升机器人的智能化水平,减小人工干预。
3.3 设备缺陷智能分析技术
变电站设备巡检过程中,机器人利用红外热像仪采集设备红外图像并上传监控后台,监控后台分析设备红外图谱获取设备温度,设备温度超过正常温度时,巡检机器人预警设备缺陷,但此种设备预警方法太过简单,使运维人员无法准确得知设备的缺陷类型,因此,采用设备缺陷智能分析技术,监控后台分析设备红外图像,依据缺陷判定准则对设备缺陷类型、潜在故障位置和特征、严重程度进行智能判断,便于运维人员获得准确的设备缺陷信息,制定合理高效的应对措施,进而保障设备的安全、可靠运行。
4 结语
目前,变电站智能巡检机器人已经在浙江、江苏、山东等省电力公司中推广应用,从实际利用的效果来看,机器人巡检一定程度上可以替代人工巡检,完成日常的表计巡视、油位巡视、红外测温及刀闸操作状态等工作,但依然存在施工调试周期长、巡检效率低、智能化水平较低等缺点。本文通过对变电站智能巡检机器人的关键技术介绍,探讨巡检机器人技术的未来发展趋势,从而推动巡检机器人产品的更新迭代,全面提升巡检机器人智能化水平,助力变电站巡检机器人的推广应用。
参考文献
[1]侯晓东.220kV变电站机器人巡检系统的设计[D].长春工业大学,2016.
[2]贤家洁,林阳坡,赖斌,陈如洲.基于激光导航路径识别的电力巡检智能机器人设计[J].中国新技术新产品,2016,12(上).
[3]兰依,石敏,耿昌易,何春.基于变电站巡检机器人的关键技术探析[J].人工智能与应用,2019,11.
[4] 张彩友,冯华,付崇光,肖鹏.变电站巡检机器人GPS导航系统设计[J].机器人技术,2010,10.
[5]龚勤慧.变电站智能巡检机器人研究综述[J].泸州职业技术学院学报,2015,2.
[6]李红梅,王滨海,廖文龙,王海鹏,肖鹏.基于地图匹配的变电站巡检机器人激光导航系统设计[J].制造业自动化,2014,01.
随着机器人在感知和操纵方面获得越来越多的能力,相关行业领域希望机器人解决日益复杂和更高相关性的任务,机器人行为设计和组合变得更加复杂。在仓库搬运的需求中尽可能地实现自动化搬运过程,这将改善整个仓库工作的可扩展性和稳健性。在仓库搬运的过程中,...
本文对智能巡检机器人技术及应用场景进行了介绍,并对智能巡检机器人在变电站应用中存在典型问题进行了分析,提出了解决办法。...
本文结合定制化、专业级服务机器人(以下简称“机房智能巡检机器人”)的核心功能,探讨了其在数据中心机房的阶段性应用成果,并提出远期发展建议,希望能为银行同业的基础设施运维工作提供一些启发和参考。...