机械工程论文

摘要:随着我国工业发展脚步的不断加快,机器人在工业智能化中发挥的作用日益突出,将其应用到机械零件分拣工作中,可以利用机器人的智能化特点,代替传统模式下的人工操作。基于此,本文主要从机器视觉技术出发,探讨基于机器视觉的工业机器人智能分拣系统设计,以此来为日后工业生产效率及质量的提升提供参考。
关键词:机器视觉; 工业机器人; 智能分拣系统;
Design and Research of Industrial Robot Intelligent Sorting System Based on Machine Vision
Gao Jian Liu Qingchuan Fan Rui Fan Xinqian Yin Zhongmin
Hebei Institute of mechanical and Electrical Technology
Abstract:With the acceleration of China's industrial development, robots play an increasingly prominent role in industrial intelligentization. By applying them to the sorting of mechanical parts, robots can replace the manual operation under the traditional mode by utilizing their intelligent characteristics. Based on this, this paper mainly discusses the design of intelligent sorting system for industrial robots based on machine vision technology, so as to provide reference for the improvement of industrial production efficiency and quality in the future.
1 视觉分拣系统方案设计
图1是视觉分拣机器人系统结构示意图,该系统在实际运行中需要四个模块相互配合来完成,每一模块都有其各自的工作和职责。其中,工件传送单元主要是由三相交流电机与传送带构成,主要负责将工件进行传送。实践证明,为了保证工件的准确识别和跟踪,给机械手有效抓取奠定基础,分拣工件的选择最好是与传送带具有较大颜色反差,比如螺帽和大小螺栓等。图像采集单元的任务是对传送带上的工件进行图像采集,该单元主要由工业相机、光学镜头、图像采集卡以及照明设备构成,对工件的图像采集是否准确,将直接影响到后续分拣作业的顺利开展和分拣质量。信息处理单元主要依赖于计算机技术,是整个系统的核心部分,主要采用视觉算法对目标对象进行识别和跟踪,同时获取目标对象的坐标,最后将信息传递到机械手控制器完成分拣任务。机械手与控制器单元是分拣流程的最后一个环节,即根据上述环节对目标工件相关信息的搜集,引导机械手实施分拣操作。目前,为了保证机械手与控制单元之间可以实现效率最高化,通常会选用RC40控制器和SCARA的四自由度机械手臂。系统的整个运行流程如下:所有类别的工件都是被随意放置在传送带上的,当各类工件被传送至图像采集设备处时,图像采集卡会逐一对工件图像序列进行采集,并由计算机对其实时坐标进行获取,所有与工件相关的信息提取后,由系统打包好传递到控制器,控制器通过对信息的分析从而指挥机械手完成分拣工作[1,2]。
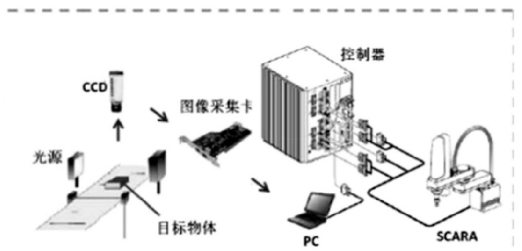
图1 视觉分拣机器人系统结构示意图
2 发那科工业机器人系统介绍
2.1 发那科工业机器人
在当前工业生产的分拣环节中,应用比较普遍的机器人就是发那科工业机器人,此类机器人是一种内置6轴伺服电机、谐波减速器和制动器系统的具有四自由度的圆柱坐标型工业机器人。在上述四个自由度中,第一、第二自由度属于旋转关节,主要由小机械臂和大机械臂两部分构成,通过这两个自由度的正常运转,可以实现水平面内水平连杆的各类旋转运动,并且能够在一定程度上保证定位的精准性。第三自由度是移动关节,具有垂直升降功能,可以完成垂直于平面的各项操作。第四自由度同样为旋转关节,类似于人体的手指部分,通过该关节运行,可以更好实现对目标对象抓取。与其他类型机器人相比,发那科工业机器人机器人所具备的优势是整体结构比较紧凑,安装占用空间较小,而且定位精确度很高,可以大幅度提高分拣效率和质量[3,4]。
2.2 发那科工业机器人控制器
基于机器视觉的发那科工业机器人在应用时若想收获预期目标,为其搭配科学、完善的控制器至关重要。目前,RCX系列的控制器作为发那科工业机器人配套的控制设备,其自身具有十分强大的功能,可以同时开展多至8个任务,具有中断处理能力及端口信息并行处理能力。与此同时,该系列的控制还可以对原点复归进行保存和记录,断电后再启动无需进行重新设置,大大提高了运行效率。RCX系列的控制器具有类似PLC的控制效果,在没有PLC控制器的情况下,同样可以对周围器件的控制功能。
3 图像采集系统部件选型
1)对工业相机的选择。应用于工业生产中的摄像机与普通相机不同,其功能需要在一定程度上满足工业生产需求,并且能够与光学镜头紧密配合,实现对目标对象的图像采集。在分拣工作中,图像采集质量的好坏不仅关系着机械手分拣的效率,而且很大程度上决定着对目标定位的准确性。所以,在对工业相机进行选择时,应根据实际需求合理选择,比较理想的是噪声低、分辨率高、抗干扰能力强以及对比度高的工业相机。具体选择时,需要从摄像机的芯片类型、分辨率以及帧率等几个方面进行选择。
从芯片类型来看,目前广泛应用的主要有两大类,即CCD摄像机和CMOS摄像机。前者的构成主要依赖于光敏二极管,在应用过程中可以有效实现光信号与电荷信号二者之间的转换,并在此基础上利用采样放大电路得到图像信号,通常情况下,图像信号是以数字方式呈现的。CCD摄像机之所以会得到如此广泛的应用,原因是其具有其他摄像机不可比拟的优势。比如说,受外界因素的影响较小、成像过程中的畸变较小以及成像速度快等。正因为此类摄像机具有诸多优势,才能够在当前工业生产中得到广泛应用。CMOS摄像机与CCD摄像机相比,具有体积小、价格低等优势,可应用此类摄像机实现图像采集模块和处理模块集成化。就目前CMOS摄像机的应用效果来看,其成像效果能够满足大部分科研需求,但是若将其应用在工业生产中,由于其摄影目标对象为移动中的机械零件,摄像机在移动图像采集方面并没有较好的效果,因此此类摄像机在工业生产中的应用并不广泛。
2)对光学镜头的选择。光学镜头在机器元件分拣工作中所起的作用就是光束调制。随着工业发展脚步的不断加快,对光学镜头的要求也越来越高。在基于机器视觉系统的实际应用中,镜头将待成像目标的光束变换到图像传感器的光敏面上,通过相机将光信号转换为最终的图像信号。镜头质量对于基于机器视觉的分拣系统整体性能会产生重要影响,所以要合理地选择镜头,以便获得最佳效果。
4 结语
综上所述,分拣工作是工业生产过程中的一个关键环节。在过去的时间里,此项工作大多以人工分拣的方式来实现,巨大的工作量不仅降低了工业生产效率和质量,同时也增加了企业运营成本。自从机器视觉技术被应用到工业智能化分拣系统中,由于系统设计是利用摄像机来模拟人类的视觉功能来对客观事物进行测量和判断,所以大幅度提高了分拣结果的可靠性,不仅提高了工业生产的智能化程度,而且也促进了工业企业可持续发展目标的顺利实现。
参考文献
[1]何泽强.基于机器视觉的工业机器人分拣系统设计[D].哈尔滨:哈尔滨工业大学,2016.
[2]蒋书贤.基于机器视觉的工业机器人分拣系统研究[D].成都:西南交通大学,2015.
[3]郑振峰.基于机器视觉运用于工业机器人抓取技术的研究[J].南方农机,2020,51(15):46-47+52.
[4]王涛.工件分拣系统中视觉单元的设计[J].南方农机,2019,50(16):138.

本文阐述了托盘式快件的物流运输标准,分析了行业最新的技术和解决方案,充足的证据表明托盘式快件自动上货系统的建设可行性很高,尤其是在标准式托盘,四四方方纸箱包装快件的情况下,采用计算机视觉技术,对托盘式快件进行识别、分割和定位,可完成托盘式快...

重点探析工业机器人的技术应用趋势与维护策略,对工业生产实践具有一定指导意义。...

机电一体化主要研究方向是计算机技术、信息技术、机械技术、电子技术、控制技术、光学技术等,具有综合性的特点。随着技术进步,将来朝着智能化、模块化、网络化方向发展。...

传统机械制造业已经无法满足人们对产品质量及其制造机械性能日渐增长的需求,而机电一体化技术将计算机技术、机械技术、传感器技术等有机结合,具有较高的精度、效率及安全性....

本文首先系统阐述了工业机器人在我国智能装备制造相关领域的重要角色定位,然后对我国工业制造机器人在我国智能装备制造相关领域应用中的实际运用情况进行了详细的案例阐述。...