机械工程论文

搬运机器人论文第六篇:托盘式快件机器人自动上货系统现状及可行性分析
摘要:此次研究通过对现有机器人自动搬运技术,视觉识别技术的分析,得出目前最新的机器人自动上货系统的实现方式和存在的问题,并通过对托盘式快件的国际标准化分析和对目前视觉识别技术的分析,逐步提出系统建设的可行性分析,最终提出研究方向:通过计算机视觉技术,逐步实现对托盘式快件的识别和分割,通过强化学习技术,逐步实现对托盘式快件的抓取和搬运,最终建成托盘式快件自动上货系统的建设,保障物流运输的高效运行。
关键词:械手;机器视觉;机器人;计算机视觉;
1. 引言
随着“一带一路”政策[1]的全面展开,对外开放程度越开越大,国际化交流程度进一步加强,国际快件,跨境电商等逐年增长,人们对物流速度,效率要求越来越高。然而目前国际物流通关体系仍停留在传统模式(手动模式),效率低,人力投入大,不能满足日益增长的国际贸易速度。
对于托盘式快件来说,人们仍然采用人工上货的原因在于:快件种类多,堆叠无规律,尺寸大小不一,很难用视觉系统和机器人系统对快件的位置进行识别和逐一抓取。所以目前大多数物流中转中心仍然采用人工上货的方式。
本次研究将通过成视觉系统的可行性分析,完成智能抓取的可行性分析,完成智能扫码的可行性分析,并通过对现有解决方案和问题的分析,逐步提出托盘式快件上货系统解决方案的多种设想,逐步提出托盘式快件的识别和抓取的多种设想,逐步完成托盘式快件的自动上货,最终达到托盘式快件的自动上货系统的建设和展望,为实现物流中转行业的高效,快速发展,推动“一带一路”政策的高效运行。
2. 托盘式快件机器人自动上货系统现状分析
2.1 行业现有解决方案
2.1.1 基于工业机器人的配料搬运装置[2]
该设计是在工业机器人的基础上,设计了一款以工业机器人为基础的配料搬运装置,其主要配件采用自动配料机、输送部件和搬运机器人。其目的是为了解决工厂配料的搬运,减少人力资源的投入,提高自动化生产的工业水平。
该设计所针对的配料为标准产品,有专门的夹具定位配料的准确位置,所设计的夹具带有专门的激光传感器,配料到位后,传感器告知工业机器人信号,工业机器人对其进行抓取搬运,抓手为专门设计,只能夹取某一范围内的配料。
该设计完成配料的自动搬运,但对应的配料尺寸标准,摆放位置固定,工业机器人的运动和夹取位置固定,只实现了部分配料的智能搬运生产。
2.1.2 视觉引导的工字轮搬运机器人系统
该设计是基于直线特征点提取并进行最优直线拟合的算法[3]来实现对工字轮图像实际轮廓中心点的定位,通过视觉系统实时定位工字轮的位置,并设计专门的机械手,实现对工字轮的抓取搬运。
该设计未设计专门的工字轮夹具,放置的位置不确定,通过视觉识别和定位,实现工字轮的抓取和搬运,但由于工字轮产品单一,尺寸固定,搬运效率慢。该系统只能实现单一产品的智能抓取和搬运。
2.2 存在问题
从目前行业内的解决方案来看仍存在以下问题:
1)目前工业自动化设备大多是对标准产品进行搬运和二次分拣[4]。
2)工业视觉设备目前仍然只能应用于特征、状态明显,对于较为复杂的应用仍需进一步开发应用。
3)目前工业机器人技术成熟可靠,但视觉系统,传感器系统,智能抓取系统仍需进一步完善。
4)智能AI技术由于环境复杂,识别速度慢,传统的识别算法仍然需要进一步改进,抓取效率需要进一步提高
3. 托盘式快件机器人自动上货系统可行性分析
3.1 视觉系统可行性分析
视觉系统应用较广的为传统的机器视觉和较为先进的计算机视觉。对于机器视觉而言,它是一项综合性技术,其基本逻辑是通过视觉产品(CMOS和CCD等)采集目标物体并转换成图像等信号,通过电路系统传送给图像处理后台软件,通过后台软件分析得到目标物体的形态等特征信息,并将目标物体的亮度、像素分布以及颜色排列等信息转变成数字化信号;图像处理后台对这些数字化信号进行特定的目标特征提取,和原有的特征信息进行对比,根据判别的结果来控制其他的设备动作。国内的机器视觉技术相对与国外来说相对落后,核心的设备还依赖于进口。而国内绝大多数机器视觉公司都集中与系统集成领域。
目前机器视觉的应用[5]主要包括机器人视觉定位、视觉目标识别、表面缺陷检测、产品尺寸测量这个四大类。但机械视觉要求稳定性高,实时性快,准确性好,处理能力强。目前发展仍然存在很多问题,如:
1)只能在特定环境运行,不能适应复杂环境,系统要求图像采集和处理的准确性接近百分之百,任何细小的错误都可能造成不可预测的后果;
2)系统极大依赖视觉检测设备图像的采集速度和处理速度,如果再引入先进的深度学习等算法,系统实时处理将很难保障,极大影响机器运行和控制的节奏;
3)对于嵌入式图像处理系统,由于存在芯片的计算能力有限、存储空间较小等问题,不能采用运算量较大的迭代算法,基本只能应用于特征信息较明显的产品识别中。
而计算机视觉系统具有自主适应环境的能力,能较好地应用在复杂环境,识别不规则形状特征。随着计算机视觉技术[6]在更多的领域落地应用,计算机视觉技术的成熟度也得到了提高,人脸识别、物体识别等分类、分割的算法[7]不断提升识别精度,未来将有更多的场景能够应用计算机视觉技术,计算机视觉的企业应在强化技术[8]的前提下,发掘更多新的应用领域,提高商业落地应用。
因此,采用计算机视觉技术将是托盘式快件自动上货系统实现的基本方法,通过强化技术的视觉训练,完成快件的分割和抓取,并且能保障系统识别的高效,快速,准确。
本章充分分析了国际托盘的标准化,国际快件上货的可行性,视觉识别系统的可行性,阐述了托盘式快件自动上货系统的可行性,想要建成托盘式快件自动上货系统,需要采用计算机视觉技术,对托盘式快件进行识别、分割和定位,并采用最优路径完成机械手快速抓取,从而实现自动快速上货。
4. 结论
本文阐述了托盘式快件的物流运输标准,分析了行业最新的技术和解决方案,充足的证据表明托盘式快件自动上货系统的建设可行性很高,尤其是在标准式托盘,四四方方纸箱包装快件的情况下,采用计算机视觉技术,对托盘式快件进行识别、分割和定位,可完成托盘式快件的自动上货,最终提高物流运输效率,减少人力资源投入,保障“一带一路”政策的进行。
通过此次研究,得出托盘式快件自动上货系统建设可行性极高,今后将采用计算机视觉技术,逐步实现托盘式快件的识别和分割,并采用强化技术,逐步实现托盘式快件的抓取和搬运,完成托盘式快件上货系统的建设和落地。
参考文献
[1]为“一带一 路”建设推出可 复制可推广的成功模式[1]翟昆北京大学国际关系学院教授2020-03-03
[2]基于工业机器人的配料搬运装置设计[2]刘金南侍晓飞江阴职业技术学院机电工程系2019-06-15
[3]空间直线的自适应阈值稳健拟合方法与优化[3]包建强张献州罗超李圆陈霄肖源淼西南交通大学地球科学与环境工程学院高速铁路运营安全空间信息技术国家地方联合工程实验室2019-12-07
[4]智能分拣系统研究及仿真[4]苟乐怡廖雪花谢小淞李驰四川师范大学计算机科学与技术学院成都工业学院经济与管理学院2019-10-25
[5]AI recognition of differences among book-length texts[5]Stephen J.De Canio Springer Journal 2020-02-21
[6]机器视觉及其在制造业中的应用[6]陈林泸州职业技术学院机械工程系2019-12-15
[7]Predicting compressive strength of consolidated molecular solids using computer vision and deep learning[12]Brian Gallagher;Matthew Rever;Donald Loveland;T.Nathan Mundhenk;Brock Beauchamp;Emily Robertson;Golam G. Jaman;Anna M.Hiszpanski;T. Yong-Jin Han 2020-02-24
[8]多智能体深度强化学习研究综述[14]孙或曹雷陈希亮徐志雄赖俊陆军I程大学指挥控制工程学院解放军31102部队2020-02-14
新能源汽车定转子冲片生产是大批量的叠片生产, 冲压机械手的应用使得这种具有循环性、危险系数高、节奏快的加工的效率得到明显提高, 同时有效节约人力劳动成本, 提高操作人员自身安全以及设备的安全性, 保持较高的产品产能、质量和工艺稳定性。...
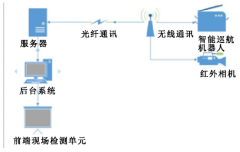
本文针对铜电解车间故障极板处理能力效率低、智能化不足等方面,详细介绍了一套智能巡航机器人系统,该系统在铜电解行业内首次正式工程性的采用了智能巡航、无线通讯、图像识别等一系列新兴智能技术,采用智能巡航机器人采集故障极板数据,大幅减轻人力负担,...

本文通过对基于三菱PLC伺服定位机械手的硬件和软件设计, 实现了工件搬运的自动控制。该系统结构简单, 编程较易上手, 运行精度较高, 具有一定的实用性。...

机械手臂种类较多, 每个类型的手臂之间结构之间存在着显著的差异。因为其内部根据特殊要求的电子电路和设计的圆截面棒。...

本文通过组间重复测量实验的方法对年轻人和老年人使用家庭智能机器人可用性和造型感知的主观差异进行了量化研究,发现两类人群的可用性和造型评价存在显着差异,探究了产生差异的内在原因,并归纳了具体差异的表现形式。...

机械手臂主要分为两大类, 一类是工业夹持器;另一类是仿生灵巧手。工业夹持器主要是针对特定的需要夹持的对象而设计的, 例如需要夹持某个球形物体, 那么机械手臂与物体的接触表面也将会被设计成弧形的。...
随着智能装备的不断发展, 越来越多的企业机械手臂的使用, 机械手臂不仅效率高, 而且国产化的不断发展也使其成本在逐步降低。...

电气复合驱动柔性欠驱动机械手, 指根节由步进电机驱动、笔形气缸推动2个含扭弹簧的指节协调转动。指根节的精确调整使得机械手具有很好的尺寸适应性, 带扭弹簧的串联双铰链结构可以很好地控制机械手与被抓物体间的接触力。机械手配合视觉系统在无需传感器的条...

在小型机床的生产流水线中, 该类机型尤其是ABB型的智能化设备使用PLC控制, 灵活方便, 起到了至关重要的作用。通过对机器人主要结构和功能特点的分析, 以及对控制面板基本应用操作的介绍...

随着现代工业自动化的发展,出现了各种数控加工中心,它在减轻工人劳动强度的同时,大大提高了劳动生产率。但以往数控加工中常见的上下料工序, 通常仍采用人工操作或传统继电器控制的半自动化装置。...