农业机械化论文

摘 要: 为解决设施温室因空间限制导致农机设备进门难、掉头难的问题, 提高耕整地、田间管理与收获环节的作业效率, 实现设施蔬菜生产机械化作业的智能操作, 北京市农业机械试验鉴定推广站研发了设施温室智能化平台。平台以电源为动力, 可将设施蔬菜生产中各环节所需的农机具集合安装在该平台上, 实现一机多用;并采用程序化设计实现自动化或半自动化控制功能。工作时, 主机平台配套农机具后可实现纵向行走、横向行走和上下升降三维化运动, 作业高效无死角, 大幅度提高设施蔬菜生产综合机械化作业水平和作业质量。在同一园区, 可实现主机平台在设施温室间转移作业, 充分发挥主机效率, 提高设备利用率。
关键词: 设施农业; 蔬菜; 智能化平台; 机械化;
Abstract: In order to solve the problem for agricultural machinery and equipment to enter the door and turn around difficultly due to limited space in facility greenhouse, improve the efficiency of tillage, field management and harvest, and realize the intelligent operation of mechanized vegetable production, Beijing Agricultural Machinery Experiment Appraisal Popularize Station developed an intelligent platform for facility greenhouse. The platform was powered by power supply, which could install agricultural machinery and tools required by each link of vegetable production in facilities on the platform, realizing multi-purpose of one machine. The platform used the program design to realize the automation or the semi-automation control function. When working, the host platform supporting agricultural machinery and tools could achieve three-dimensional movement with vertical walking, horizontal walking and up and down moving, efficient operation without dead angle, greatly improving the level and quality of comprehensive mechanization of vegetable production facilities. In the same park, the host platform could transfer operations between facility greenhouses, gave full play to the host efficiency and improved the utilization rate of equipment.
Keyword: facility agriculture; vegetable; intelligent platform; mechanization;
设施农业是北京农业的重要组成部分, 日光温室是设施农业的主要生产形式, 据2014年年底数据统计, 日光温室在北京市各种设施农业结构形式中占地面积65%, 约15 800 hm2[1]。但由于日光温室空间狭窄, 仅在耕整地环节有比较适用的微耕机作业, 综合机械化水平很低[2], 表现为作业效率低、旋深浅 (小于12 cm) 、劳动强度大、燃油污染严重。日光温室蔬菜生产中的其他作业环节, 如施撒有机肥、铺管覆膜、种植移栽、运输等基本以人工作业为主, 劳动强度大、作业效率低, 急需实现机械化作业。为提高日光温室综合机械化作业水平、提高耕整地作业质量、降低劳动强度, 北京市农机试验鉴定推广站联合企业共同研发了设施温室智能化平台。

1、 智能化平台的设计特点
平台以电源为动力, 将日光温室蔬菜生产中各环节所需的农机具集合安装在该平台上, 实现一机多用;并采用程序化设计实现自动化或半自动化控制功能;同时辅以电子信息技术, 实现远程监控作业模式。
1.1、 实现一机多用、多环节机械化作业
设施温室智能化平台根据日光温室空间结构特点, 采用了轨道、龙门式横梁设计, 实现了纵向、横向行走及上下升降运动, 专门用于日光温室蔬菜生产机械化作业。设施温室智能化平台通过回旋盘结构, 可以方便、快捷地与多种农机具连接配合, 实现一机多用、多环节机械化作业, 大幅度提高了日光温室机械化作业水平。
工作时, 平台主机安装上配套的农机具后, 沿两侧的轨道前后移动纵向行走, 沿主横梁左右移动横向行走, 同时主机可上下升降运动, 从而实现在日光温室内三维化运动模式, 辅以不同的作业机具, 可以有效地实现有机肥撒施、土地耕整、开沟起垄, 铺管覆膜、播种移栽、灌溉植保、果实运输等多环节无死角作业, 提高日光温室综合机械化作业水平和作业质量。
1.2、 实现主机在日光温室间转移作业
在一个园区内, 同等宽度轨道设计情况下, 可以实现主机在日光温室间转移作业, 充分发挥主机效率, 提高设备利用率。
各温室铺设同等跨度纵向轨道, 同时在轨道一端铺设转运轨道。转运轨道上对接转运轨道车, 该转运轨道车也是各配套农机具载体。在转运轨道车上安装主要配套农机具码放支架, 确保农机具码放支架定位准确, 以方便主机挂接。
当主机平台转运作业时, 龙门式横梁和主机沿纵向轨道行驶到转运轨道车上, 启动转运轨道车电机, 转运轨道车载着龙门式横梁和主机以及码放在转运轨道车上的配套农机具, 一同沿转运轨道行走到下一栋温室, 对接好该栋温室纵向轨道, 完成主机平台的转运工作。
1.3、 实现自动化或半自动化生产作业
设施温室智能化平台的集成应用, 有力地促进了农机农艺融合发展, 形成了以机械化作业为主的日光温室蔬菜生产新模式。由于设施温室智能化平台可实现自动化或半自动化生产作业, 同时通过网络可实现作业情况报告和远程监测, 减少劳动力用工量, 缓解农忙时节用工紧张问题;同时大幅度降低劳动强度, 打破了传统上以人工作业为主的温室蔬菜生产模式。
1.4、 实现节能减排
设施温室智能化平台以电能为动力, 避免了汽油机、柴油机等机械设备作业时造成的环境污染, 使用方便, 运行成本低。
2、 智能化平台的设计方案
2.1、 平台总体结构设计
设施温室智能化平台以电能为动力, 实现一机多用, 主要由2条平行的地轨、在地轨上纵向行走的横梁、横梁上横向行走的主机、主机上回转盘以及控制系统组成[3,4] (图1) 。
纵向行走轨道长度和跨度根据日光温室结构而定;龙门式横梁主要由龙门架、驱动电机、行走轮、控制系统等部件构成, 通过齿孔啮合, 沿纵向轨道前后行走;主机主要由框架、驱动电机、行走链轮、升降系统、回转系统、电动伸缩杆等组成, 通过链传动, 沿龙门式横梁左右行走。主机升降系统采用独立电机控制, 通过机械传动实现主机回转系统上下升降;回转系统在独立电机驱动下, 通过蜗轮蜗杆减速装置可实现回转盘180°往返旋转运动。
设施温室智能化平台作业时, 主机行走到作业机具坐标位置, 启动电动伸缩杆快速挂接农机具, 归位纵向 (横向) 作业原点。若启动手动作业程序, 每一步作业均需人工操作完成。若启动自动作业程序, 将按输入程序自动完成既定的作业。如纵向自动旋耕作业, 先启动旋耕机旋耕刀, 然后主机旋转盘下降, 使旋耕刀达到既定旋耕深度, 接着龙门式横梁带动主机沿纵向轨道行走开始旋耕作业。当达到既定的作业行程时, 龙门式横梁带动主机停止运动, 主机旋转盘提升, 使旋耕刀离开地面达到既定高度;此时, 主机带动旋耕机沿作业方向后移0.5 m, 然后回转盘电机启动驱动旋耕机旋转180°, 完成旋耕作业方向调整。此时, 主机再次带动旋耕机沿作业方向后移0.5 m, 然后沿龙门式横梁移动一个作业幅宽, 再驱动旋转盘下降, 使旋耕刀达到既定旋耕深度, 接着龙门式横梁带动主机沿纵向轨道行走开始回程旋耕作业。如此往复既定的作业行程, 自动完成日光温室内无死角旋耕作业。同理也可以实现自动化起垄、播种等环节作业。
图1 设施温室智能化平台的总体结构
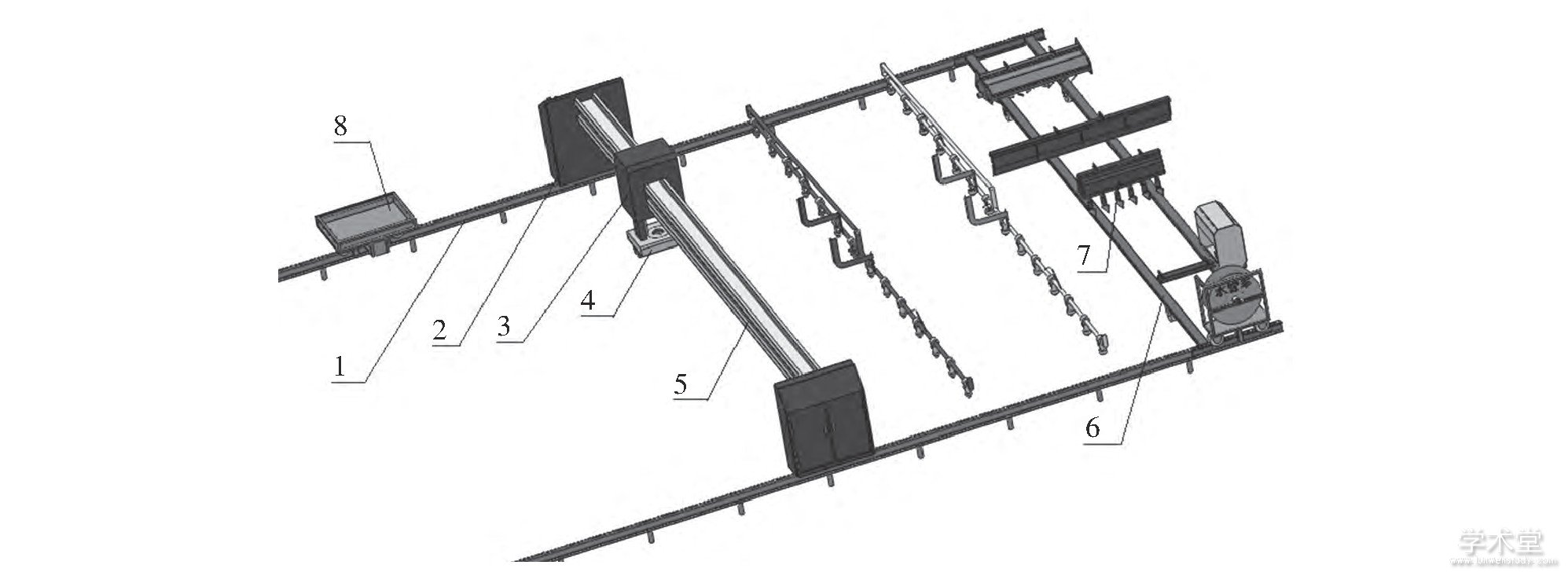
1.纵向地轨;2.纵向行走机构及横梁支撑架;3.主机;4.回转盘;5.横梁;6.转运轨道车;7.配套农机具;8.单轨运输车。
2.2、 设施温室智能化平台行走机构设计
2.2.1、 纵向行走机构设计
设施温室智能化平台纵向行走机构主要由支撑架、电机、减速箱、链传动、驱动齿轮、从动轮等部件构成, 在两侧轨道各制作1套。通过电控调频控制保证两侧纵向行走机构同步运动。
2.2.2、 横向行走机构设计
设施温室智能化平台横向行走机构主要由支撑架、电机、减速箱、链传动、驱动链轮、侧支撑轮等部件构成。通过电控调频控制实现横向行走变速运动。
2.2.3、 升降运动机构设计
设施温室智能化平台主机升降运动机构主要由支撑架、电机、丝杠等部件构成。通过丝杠旋转实现主机升降运动, 并可停留在所要求的作业高度。
2.2.4 、往返运动机构设计
设施温室智能化平台主机往返运动机构主要由支撑架、电机、蜗杆、蜗轮等部件构成。通过电动控制实现回转盘180°内不同角度的旋转, 从而满足作业要求。
2.3 、农机具的设计
设施温室智能化平台主机通过旋转盘可以悬挂各种农机具, 根据作业需要与主机配套集成, 实现主机+不同农机具的机械化作业模式;本次研发以实现叶类蔬菜 (主要以油菜为代表) 全程机械化作业为目标, 设计配套农机具, 叶类菜生产主要包括土地旋耕、平整、播种、喷灌、植保、运输环节作业[5]。
2.3.1 、旋耕机设计
旋耕机采用双电机同步驱动, 主要由机架、快速连接吊耳、旋耕部件、减速机、链传动部件构成 (图2) 。耕幅宽度1.0 m, 耕深15~20 cm。
2.3.2 、平地铲设计
平地铲主要由机架、快速连接吊耳、铲面部件构成 (图3) 。平地作业幅宽2.0 m。
图2 旋耕机结构
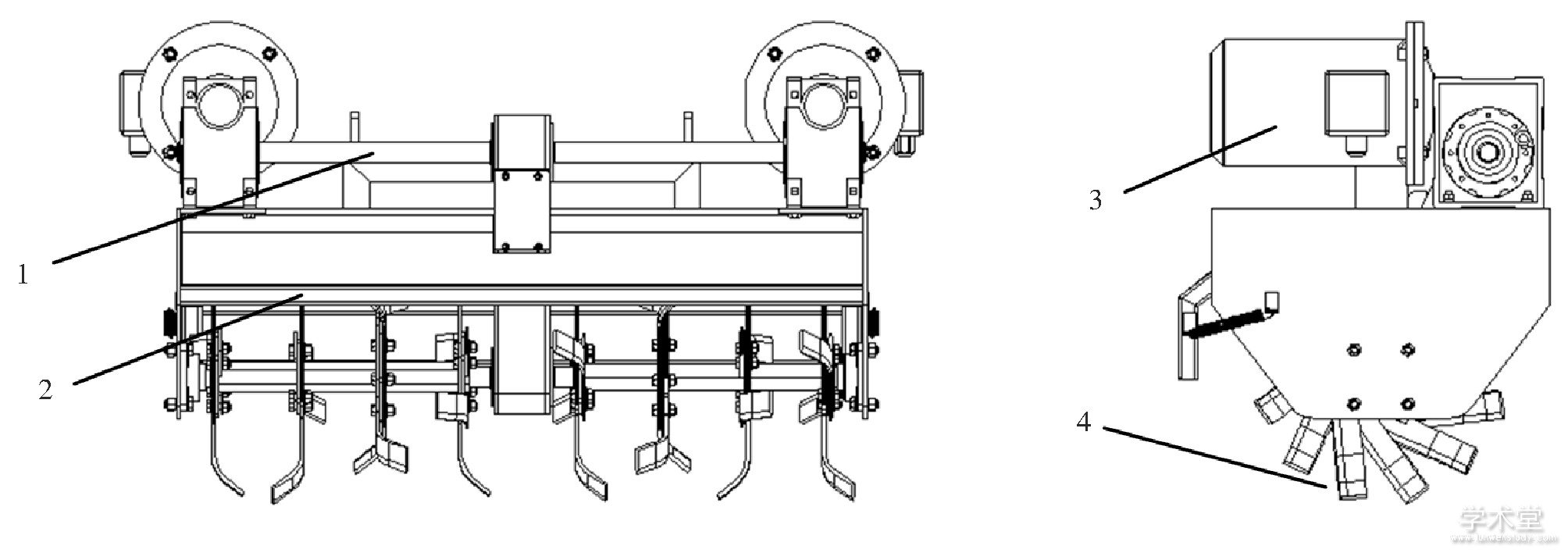
1.快速连接吊耳;2.机架;3.电机;4.旋耕刀。
图3 平地铲结构
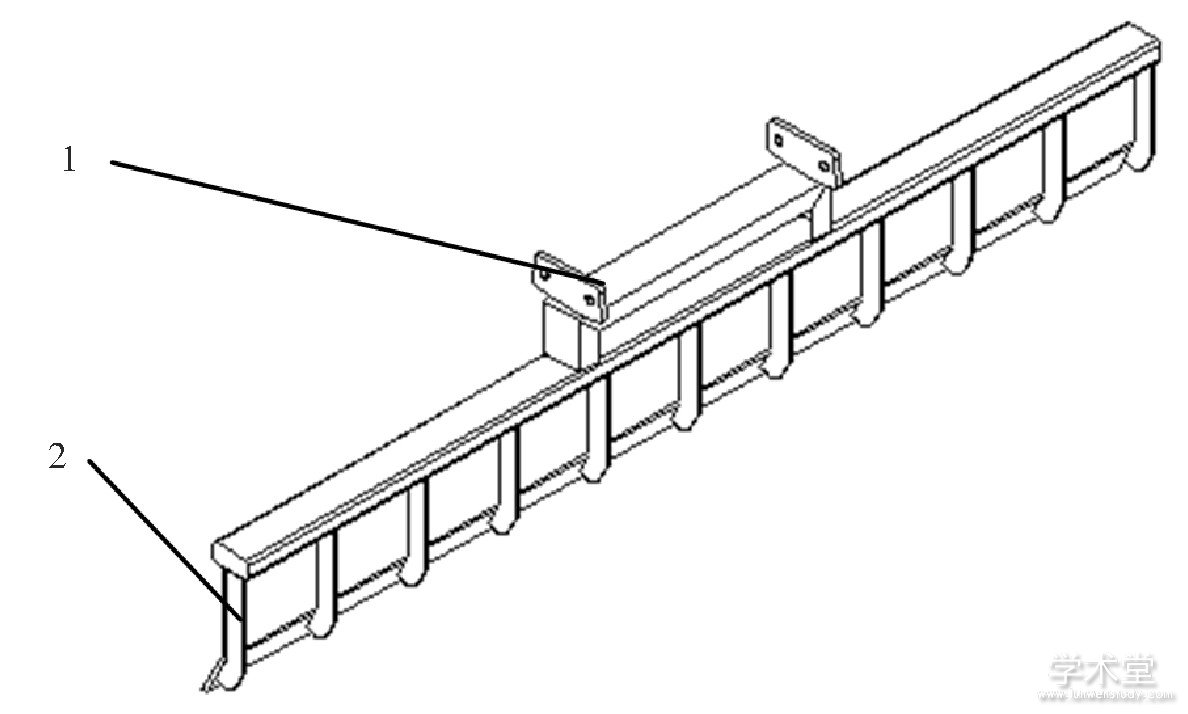
1.快速连接吊耳;2.铲面。
2.3.3、 播种机设计
播种机采用变频电机驱动, 主要由机架、快速连接吊耳、播种部件、镇压辊部件构成 (图4) 。播种幅宽0.9 m;播种行数1~6行可调;行距15.0、18.0、22.5、30.0 cm可调;粒距2~30 cm可调。
2.3.4、 喷灌系统设计
喷灌系统主要由机架、喷灌杆、喷头、复卷式供水管系统构成 (图5) 。在满幅喷灌喷杆上安装喷水、喷药、施肥三用喷头。当进行浇水作业时, 设定好主机行走速度, 调整好喷头, 将复卷式供水管快速接通喷杆, 打开阀门即可实现浇水作业。当施肥 (液态) 作业时, 设定好主机行走速度, 调整好施肥喷头, 连接好施肥罐, 将复卷式供水管快速接通喷杆, 打开阀门即可实现施肥作业。
2.3.5、 植保系统设计
植保系统主要由机架、喷杆、喷头、药箱、电机、泵等部件构成 (图6) 。当植保作业时, 设定好主机行走速度, 调整好打药喷头, 将药箱管路快速接通喷杆, 启动电机、泵即可实现植保作业。
2.3.6、 运输车设计
以单边纵向轨道为基础, 运输车设计成遥控式单轨运动形式。运输车主要由机架、车斗、电机、减速箱、链传动、驱动齿轮、从动行走轮、侧支撑轮、蓄电池、控制系统等构成 (图7) 。可承载质量不大于100 kg, 遥控有效距离100 m内。
图4 播种机结构
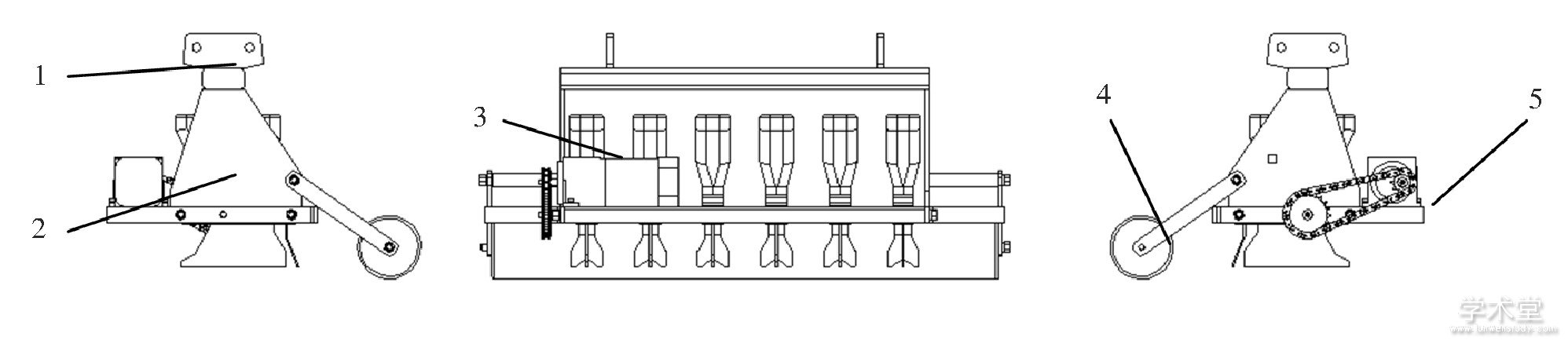
1.快速连接吊耳;2.机架;3.播种器;4.镇压辊;5.传动装置。
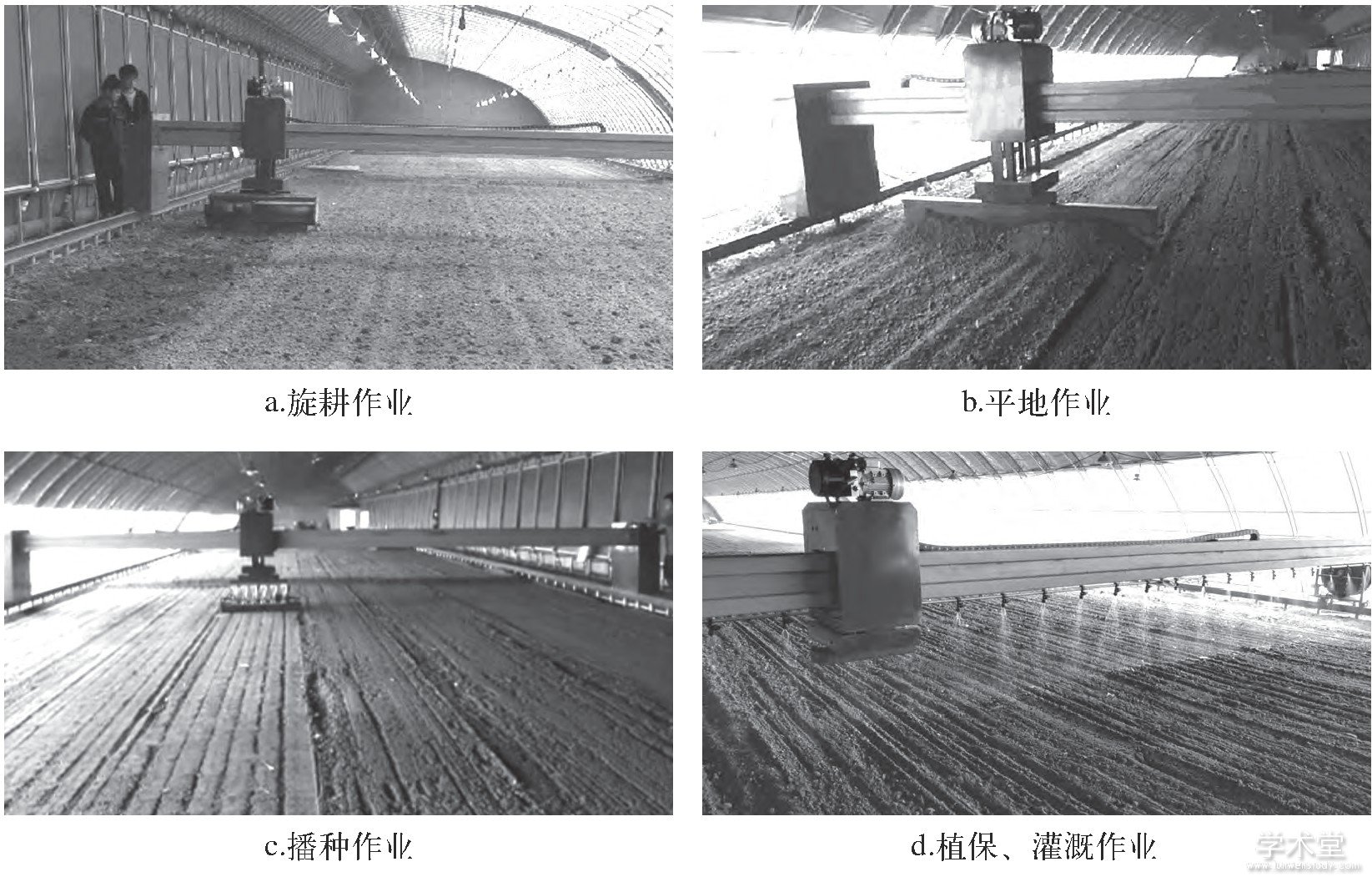
3、 平台在油菜上的应用效果
在试验示范园区进行了油菜播种试验, 效果良好 (图8) 。
3.1 、旋耕作业
采用纵向旋耕作业模式, 绝对深度18 cm, 耕幅1 m, 行进速度10 m/min。观察设备作业情况, 测耕深和碎土率。
采用纵向旋耕作业模式, 将平台主机安装好旋耕部件, 归位纵向作业原点, 设定旋耕深度为18 cm, 行程23 m, 横向移动1.0 m, 启动旋耕纵向作业模式, 自动完成7个往返作业耗时25 min, 作业效果良好。
沿机组前进方向, 用耕深尺测定旋耕深度5次, 均大于18 cm。在耕幅内测定0.5 m×0.5 m面积内的全耕层土块5次, 土块边长均小于4 cm。
3.2、 土地平整作业
油菜播种要求种子播深一致以利于出苗, 旋耕后的土地需要刮平以保证更高的出苗率。
对同一栋温室来说土地一次大平整后基本处于平整状态, 播种前的平地作业完全手动操作。以轨道顶面为测量0点标高, 根据温室土壤地面高度, 在总土量基本平衡的情况下, 确定平地铲作业标高为-10 cm, 进行横向、纵向行走, 并根据土壤地面情况, 以-9 cm标高作业, 将土壤刮平。
3.3、 播种作业
进行油菜播种作业, 油菜种子基本圆粒形, 直径在1.8~2.2 mm, 故选用6穴眼3 mm播种轮作业。纵向播种油菜作业, 要求行距15 cm, 株距5 cm。将平台主机安装好播种部件, 归位纵向作业原点, 匹配株距设定纵向行走速度10 m/min, 播种机播种转速为35 r/min, 行程23 m, 横向移动0.9 m, 启动播种作业模式, 自动完成6个往返作业耗时26 min, 作业良好。
待出苗后挑选2行各选择1 m, 经观察、计算, 油菜重播率、漏播率符合播种机要求, 播种株距变异系数小于3%, 基本稳定在5 cm左右。
3.4、 植保、灌溉作业
在油菜播种后, 主要是植保、灌溉管理作业, 接好浇灌系统归位起点, 设定设施温室智能化平台纵向行进速度0.5 m/min (根据浇水量可调整行进速度) 进行浇灌作业。植保作业时, 接好药箱系统, 调整纵向行走速度, 自动完成植保作业。测定浇灌、植保均匀系数大于90%, 效果较好。
3.5 、运输作业
在油菜收获后, 成筐摆放在遥控运输车上, 遥控距离大于50 m, 一次可承载100 kg, 运行稳定。
4、 智能化平台的经济效益分析
以油菜生产为例, 在不考虑设备成本情况下, 在旋耕、平整地、播种、喷灌浇水等环节应用设施温室智能化平台, 每栋日光温室、每个茬次可节约10个人工, 按每人每日120元计算, 每667 m2每茬可节约人工成本1 200元, 每667 m2温室每年按生产6茬次叶类菜 (油菜) 计算, 可节约人工成本7 200元。
虽然设施温室智能化平台前期研发投资与试验投资偏高, 待设备性能可靠、运行稳定后批量生产, 可大幅度降低设备成本, 同时节约人工成本。只要完成了温室轨道及温室间转运轨道的建设, 1套平台主机可以完成多个温室的农机作业, 不用购买拖拉机、各种农机具, 避免了重复投资。设备定型后平台主机成本低于10万元。
图5 喷灌系统结构
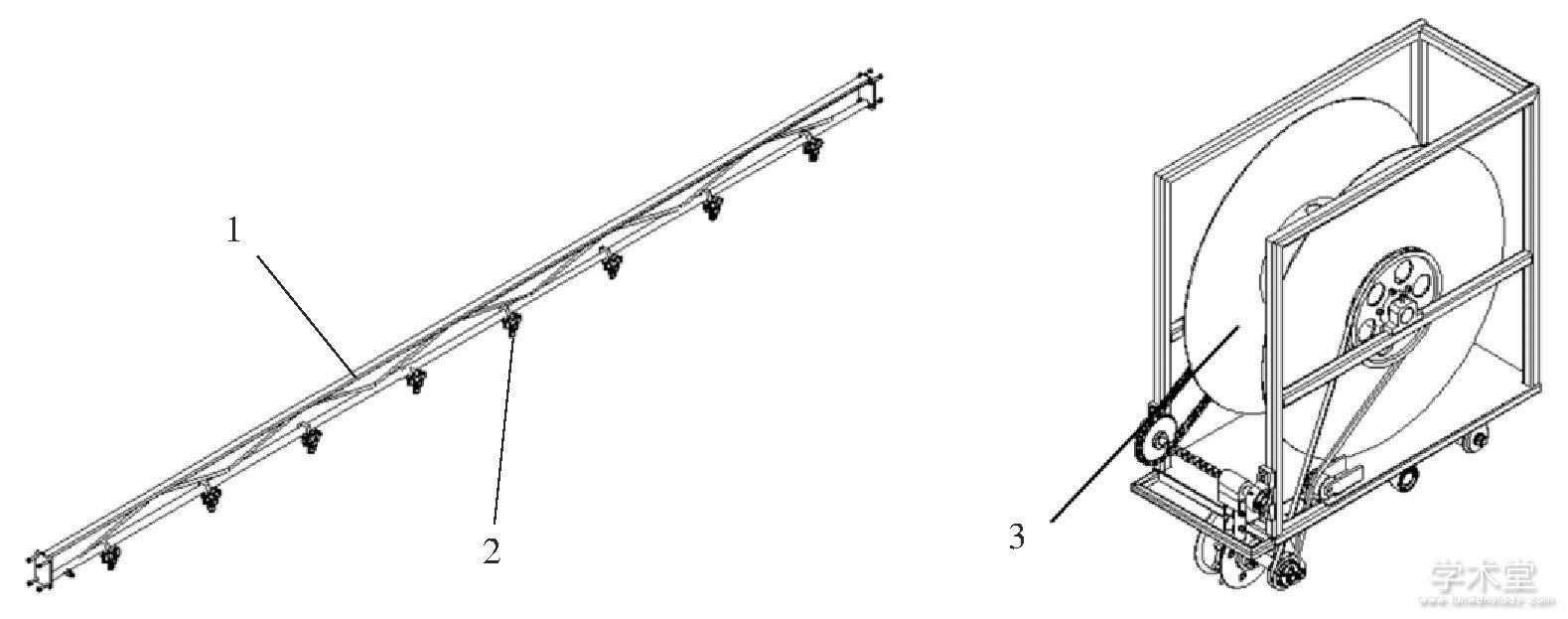
1.喷杆;2.三用喷头;3.复卷式供水装置。
图6 植保系统结构
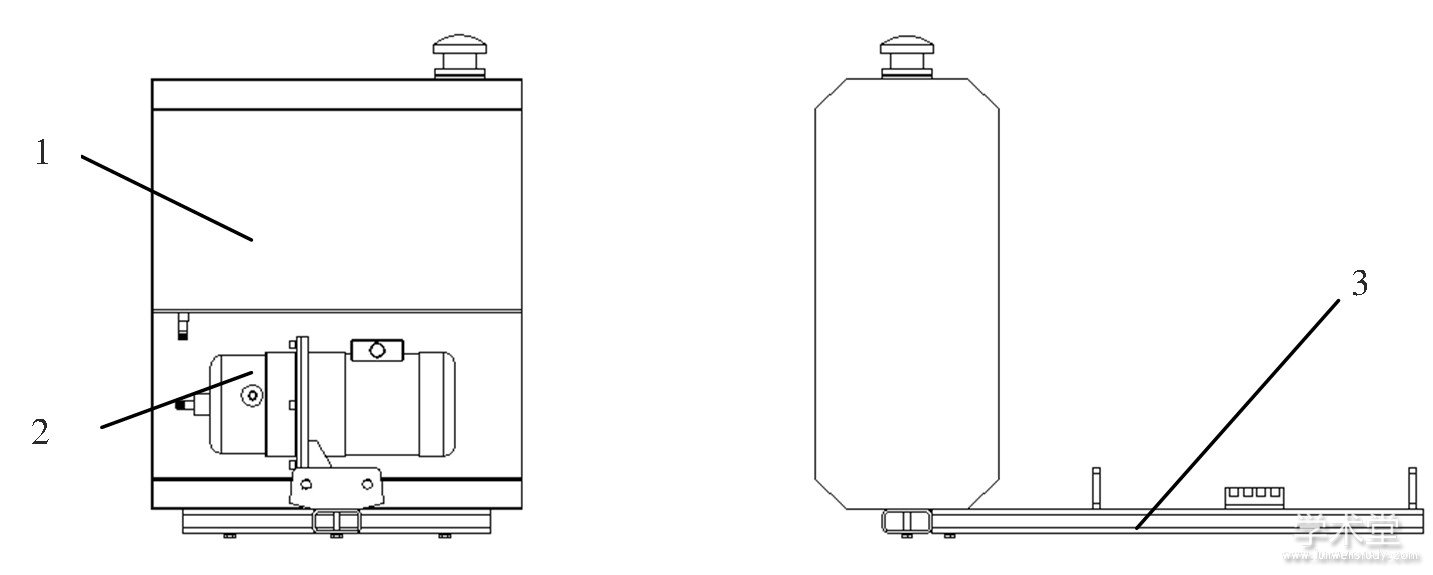
1.药箱;2.电机、泵;3.机架。
图7 运输车结构
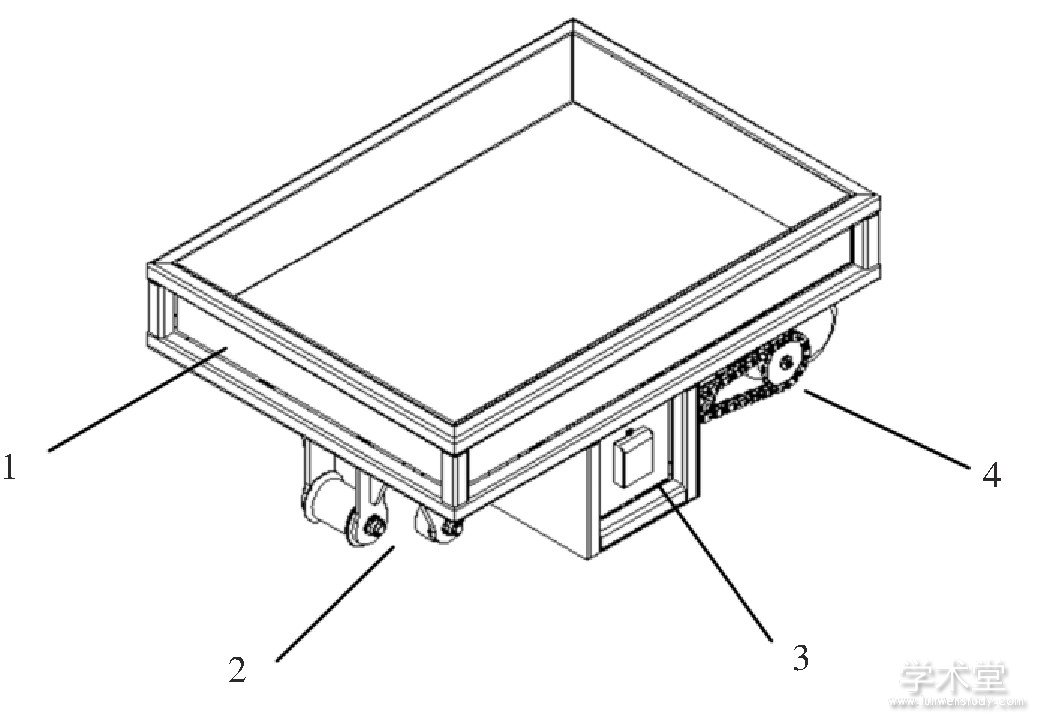
1.车斗;2.支撑轮;3.蓄电池;4.传动装置。
图8 智能化平台作业试验
5、 智能化平台应用前景分析
设施温室智能化平台是设施蔬菜种植园区内的专用生产装备, 1套装备基本可满足园区内50栋日光温室的生产作业, 通过配套温室轨道, 便可实现叶类菜全程机械化生产作业。在设备成本投入方面, 配备设施温室智能化平台主机+配套农机具及轨道, 减少了拖拉机、旋耕机、起垄机、植保机械等设备投资;在使用成本方面, 增加电费支出, 减少汽油、柴油消耗支出, 并节约大量人工费用。
目前, 平台实现了叶类菜 (油菜) 全程机械化作业, 未来将进一步完善主机平台性能, 加大果菜类生产关键环节如自动化铺管覆膜、移栽等配套农机具研发力度, 逐步实现设施蔬菜生产全程机械化作业。
参考文献:
[1] 北京市农业局.2014年北京市蔬菜种植统计年报[R].北京:北京市农业局蔬菜处, 2014:12.
[2] 北京市农业局.2014年北京市农业机械化管理统计年报[R].北京:农业部农业机械化管理司, 2014.
[3]成大先.机械设计手册 (第4版) [M].北京:化学工业出版, 2002.
[4] 刘鸿文.材料力学[M].北京:高等教育出版社, 1987.
[5] 王万均.实用机械设计手册[M].北京:中国农业机械出版社, 1989.

0引言目前,我国已经成为温室蔬菜种植大国,温室蔬菜种植面积已占到全世界种植面积的80%以上,主要分布在山东、河北、北京、东北三省等地.2012年中央一号文件与全国农业机械化发展第十二个五年规划强调,实现精准农业,加快发展现代设施农业,提高设施农业装...
水生蔬菜是指在淡水中生长、其产品可作蔬菜食用的维管束植物,包括莲藕、子莲、茭白、芋、荸荠、菱、慈姑、水芹、蕹菜、芡实、莼菜、蒲菜、豆瓣菜、蒌蒿等[1].我国水生蔬菜资源丰富、历史悠久、特色鲜明,绝大多数水生蔬菜原产于我国,国外较少栽培。自2...
据2012年底农业部农机化司在全国试行的设施农业机械化水平评价指标体系中的统计数据,包括我国设施蔬菜在内的设施种植业综合机械化水平为26.62%,而同期我国小麦、水稻的综合机械化水平分别为93.21%和68.82%(中华人民共和国农业部),因此,与其他主要粮食作...