农业机械化论文

0 引言
目前,我国已经成为温室蔬菜种植大国,温室蔬菜种植面积已占到全世界种植面积的 80% 以上,主要分布在山东、河北、北京、东北三省等地.2012 年"中央一号"文件与全国农业机械化发展第十二个五年规划强调,实现精准农业,加快发展现代设施农业,提高设施农业装备智能化、自动化水平[1].蔬菜准直播种技术具有节省种子、减少间苗用工量、出苗齐整、群体结构合理、成熟期一致等特点,便于一次收获,并能提高蔬菜产量和质量,可避免由于人工操作播种机播种不精直给机械化收割带来弊端.目前,种植主要是通过人工画线和起垄的方式来保证播种精直,生产效率低,劳动强度大.
因此,研究开发一种适用于温室蔬菜播种机的激光走直系统,可实现播种过程自动走直,减少人工劳动量,同时可以大幅度降低农业生产成本,提高设施农业土地利用率,在我国设施农业中具有广阔的市场前景.
1 主体结构及激光走直原理
1. 1 主体结构
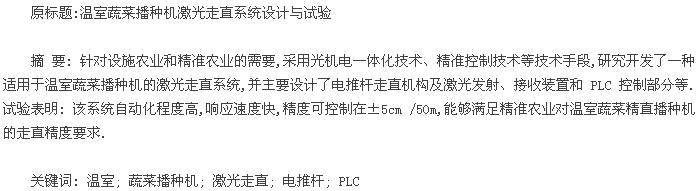
温室蔬菜播种机激光走直系统主要由激光发射装置、激光接收器、转向执行机构和电子控制部分组成,如图 1 所示.
1. 2 激光走直原理
在大棚中安置激光发射器,工作时输出激光垂直面,为蔬菜播种机提供导向信号,蔬菜播种机上的两个直流电推杆协同工作.播种机前端的激光接收器为蔬菜播种机提供直线行走、左转、右转输入信号.
当激光导引信号照射在接收器正中时,左右两电推杆不运动,蔬菜播种机沿激光导引信号直行; 当信号照射在接收器左侧时,说明小车偏右,控制器同时控制右电推杆伸长和左电推杆收缩,小车左转,直到导引信号回到正中; 当导引信号照射在接收器右侧,说明小车偏左,控制器同时控制右电推杆收缩和左电推杆伸长,小车右转,直到激光信号回到接收器中间位置,实现蔬菜播种机沿激光导向信号直线行走.
2 关键部件的设计
2. 1 转向执行机构
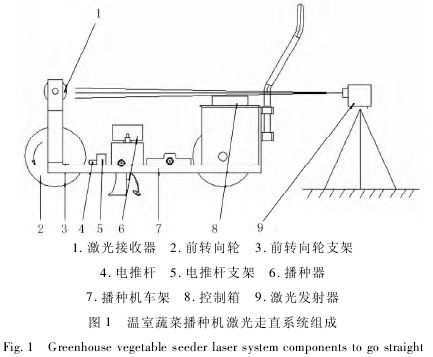
前轮转向执行机构如图 2 所示.整个转向执行机构由前转向轮转轴、前转向轮、转向轮支架和左右电推杆组成,电推杆与转向轮支架和电推杆支架通过铰链链接.转向时,左右电推杆协同工作: 当向右转时,左电推杆伸长,右电推杆收缩,实现右转; 当向左转时,左电推杆收缩,右电推杆伸长,实现左转.
2. 2 激光发射器
激光发射器是一种由干电池供电的激光束发生装置,由半导体激光器、光学准直压缩系统、旋转平台和水平校正系统组成.半导体激光器经过激励产生可视、低功率的激光束.常见的激光发射器产生的激光束是波长在 630 ~680nm 范围内的红光.由于激光束发散角较大,采用了光学准直压缩系统,进行激光束准直和发散角压缩.经过准直压缩后,激光束垂直入射旋转平台上的五棱镜,五棱镜使激光束转向 90°后出射,旋转平台通过由水平校正系统控制的电机拖动可以实现旋转.水平校正系统利用重锤原理判断激光发射器的水平状态: 当激光发射器水平状态符合工作要求时,水平校正系统发出信号使电机和激光器工作,实现激光束扫射.
经过对比国内外多种激光发射器的主要性能指标、价格等因素,选择了国产福田激光水平仪 EK-155AP( 如图 3 所示) 作为激光控制系统的激光信号源.此激光信号发射器能够发射水平激光线和垂直线,采用自动调平方式,给校准工作提供精确的水平和垂直基准,操作简单,可全天候工作,用途广泛.红光波段波长 635nm,自动安平范围±2. 5°,工作半径在50m 以上,精度±1mm /5m.
2. 3 激光接收器
激光接收器是激光控制系统的一个重要组成部分.激光发射器在作业时发射垂直光束,形成一个垂直激光束基准面; 激光接收器作为一座连接激光发射器与控制器的桥梁,实时接收微弱低频的激光束信号,经过处理,传送位置偏差信号给控制器.
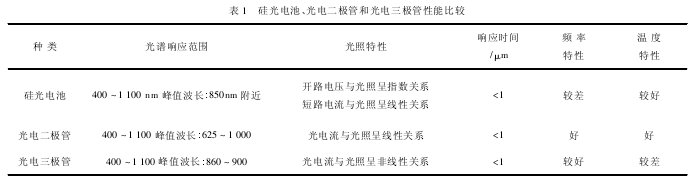
激光接收器的设计关键在于光电传感器,适用于激光接收的光电传感器主要有光电二极管、光电三极管和光电池等.3 种光电传感器的性能比较如表 1 所示.经比较,本系统选择光电池作为光电传感器.
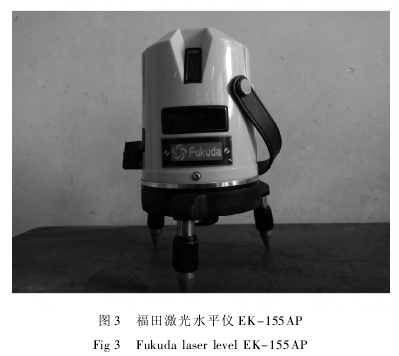
硅光电池的排列方法: 将两片硅光电池( 20mm×10mm) 水平横向排列放置.激光接收器如图 4 所示,输出 3 个状态为: 左硅光电池接收信号、右硅光电池接收信号、两片硅光电池同时接收信号.

3 PLC 逻辑控制
3. 1 PLC 的选型及 I /O 接口分配
可编程序控制器简称 PLC,它是在传统顺序控制器的基础上引入微电子技术、计算机技术、自动控制技术和通信技术等形成的新型工业控制装置,具有能力强、可靠性高、配制灵活、编程简单等优点.蔬菜播种机激光走直系统需要左偏信号、中间信号和右偏信号 3 个输入端口和两个信号输出端口.根据对 PLC的 I/O 接口数量和价格的要求,选用了西门子公司的S7-200 系列小型 PLC,具有极高的可靠性、强大的通信能力和丰富的扩展模块,而且价格便宜.
西门子公司的 S7-200 系列小型 PLC 的 I/O 接口具有以下特点: 输入寄存器( I) 共有 14 个点,接受外部输入设备的信号; 输出寄存器( Q) 共有 10 个点,输出程序执行结果并驱动外部设备; 左偏信号、中间信号和右偏信号 3 个输入端口分别分配给 PLC 的 I0. 0、I0. 1、I1. 2; 两个输出信号分别分配给 PLC 的 Q0. 0、Q0. 1、Q0. 0 输出的信号用来控制蔬菜播种机左转,Q0. 1 输出的信号用来控制蔬菜播种机右转.
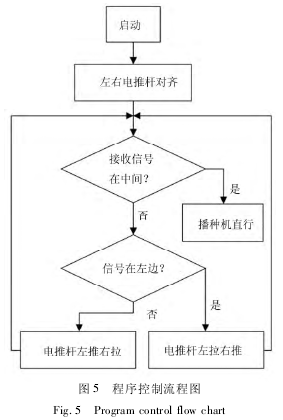
3. 2 程序控制
蔬菜播种机激光走直系统主要是通过激光接收器接收激光信号并判别播种机偏转方向; 再将信号传递给 PLC,通过 PLC 逻辑运算后,发出相应指令,控制两个电推杆执行转弯动作,以实现自动走直.PLC 程序控制流程图如图 5 所示.
4 试验与结果
4. 1 试验条件与方法.
在完成温室蔬菜播种机激光走直系统设计后,进行了温室播种走直性能试验.温室试验在保定南市区农大三分厂试验地进行,主要测试了温室蔬菜播种机激光走直系统的走直精度.本次试验选取了一个长为 50m 的温室,试验地为旋耕平整过的土地,土壤类型为壤土,土壤紧实度为 1. 52×104Pa,土壤含水率为 19. 8% ( 0 ~10cm) .采用对比方法进行试验: 第 1次通过人控制播种机行进方向; 第 2 次启用激光系统,利用激光控制系统自动控制播种机行进方向; 最后,测量播种机轮缘轨迹距离激光垂直面的距离,利用 Excel 对两次实验数据进行处理和对比.
4. 2 试验结果与分析
经过 Excel 处理后的两次试验结果如图 6 所示.图中,点划线为播种机人控时的试验结果,粗实线为开启激光走直系统后的试验结果.
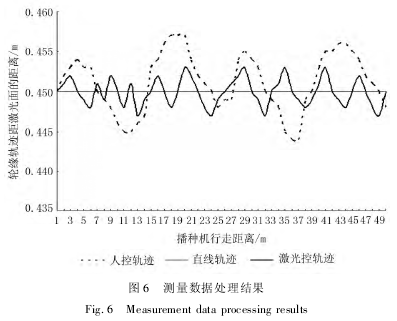
从试验结果对比来看,开启激光走直系统后走直精度明显要比人控走直精度高,而且响应速度快,工作效率高.经实际测量,该激光走直系统的走直精度为±5cm /50m.
5 结语
通过研究设计电推杆走直机构、激光发射和接收装置、PLC 控制部分,最终研究开发出了了一种适用于温室蔬菜播种机的激光走直系统.温室试验表明:
该系统自动化程度高,响应速度快,实际测量该激光走直系统的走直精度为±4cm/50m,能够满足精准农业对温室蔬菜精直播种机的走直精度要求.此外,本激光走直系统同样适用于大田机械,但是目前缺少相关试验,有待进一步的研究.
参考文献:
[1] 农业部. 农业和农村经济发展第十二个五年规[EB/OL].[2012-08-31].
[2] 戴志中. 我国设施农业机械的现状及发展趋势分析[J].中国农机化,2000( 4) : 42-43.
[3] 樊桂菊. 国外设施农业机械的发展现状[J]. 农业装备技术,2003( 2) : 47.
[4] 张开飞. 关于农业温室自动化作业平台的研究[D]. 郑州:郑州大学,2009.
[5] 倪志武. 高性能激光接收组件设计[D]. 南京: 南京理工大学,2010.
[6] 刘建. 田间作业机组激光导向系统设计[D]. 泰安: 山东农业大学,2011.
[7] 武丽萍. 双置油缸推拉转向机构的设计[J]. 拖拉机与农用运输,2010( 5) : 84-86.
[8] 齐晓娜. 挖掘机激光定深系统设计[J]. 建筑机械,2010( 11) : 98-100.
[9] 孙靖民,梁迎春. 机械优化设计( 4 版) [M]. 北京: 机械工业出版社,2006.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...