ˮ��ѧ����

����ժ Ҫ����ˮ����ʩ�в���ˮ���˶��ٶȹ���һֱ��ˮ�������������ص��о��Ŀ��⣬���ڲ���ˮ�������ݸ��ӵ��ݱ���ƺ;��ҵ��Ķ�˲�䣬�������еIJ�����������ȷ�ı���ˮ��������������ڹ��������������ӻ�����������ص����ƶ���Ϊͼ��ʶ�������ص��о��ķ��������ܹ������������ȼ����ϸ�������˶��ĸ߷ֱ��ʹ��������ֲ��˴�ͳ�Ļ�������ͼ����ټ����IJ��㡣Ϊ��ȫ��ķ�ӳ�������о���ԱӦ�ù��������Բ���ˮ���������ӻ����ƵĽ�չ�����ĴӾ����������ԭ��������������Ŀǰ���ڲ���ˮ���еļ��ֹ������������ص㣬Ȼ���ܽ��˹��������ڴ�������ˮ�����ָ��ӳ���ʱ���õĹؼ������Ͳ���ѡ����������̽���˹��������ڲ���ˮ��Ӧ���������ٵ���ս��ǰ�����⣬������δ���ķ�չ����չ����
�����ؼ��� : ����ˮ��;������;�������ӻ�;��չ;�ؼ�����;ǰ������;
����Abstract����Velocity measurement in highly aerated flow is an important research topic in both fields of air-water two-phase flow and hydraulic engineering. Due to the complex evolution mechanism and rapidly turbulent fluctuations of self-aerated or artificially-aerated bubbly flow, the current measurement techniques have their limitation in accurate characterization of the flow velocity and velocity turbulence. The flow visualization technique based upon the optical flow has become a significant research interest in the field of image recognition due to its unique advantages. According to the brightness of pixels on the image, the optical flow method enables calculation of the high-resolution optical fields for the meso-scale movement of bubbles, making up for the shortcomings of traditional particle image velocimetry. Aiming to provide a comprehensive picture of the progress and the state of the art in the application of optical flow technique in the aerated flow field visualization, this paper firstly introduces the principle of classical optical flow method, reviewing the several applicable optical flow techniques in highly aerated flow at present. Then, the key processing techniques and parameter selections for the application of optical flow method to the complex cases of highly aerated flow are summarized. Finally, the challenge and frontier scientific and practical issues faced by the optical flow techniques in highly aerated flow are discussed, and the potential future development directions are prospected.
����Keyword����highly aerated flow; optical flow method; flow visualization; review; key parameters; frontier issues;
����0�� ����
������40���������ҹ���ˮ��ˮ�繤�̽�����ҵ���չ�����ﵽ��������ˮƽ����Щ����ˮ�����̴�ཨ����խ�ĺӹ������ˮͷ�ߡ�й����������ص�[1,2]�������漰�ĺ�������֮һ�Ǹ���ˮ��й��ʱ��ˮ�������������[3]���������������������Ч�ʵ�ͬʱ�����ײ���й��ˮ������[4]��ˮ�������ܽ����������[5,6] ������Ŀǰ���ڸ���ˮ���������Ƶ��о��Ѿ�ȡ����һЩ�����ɹ���������ˮ�������ž��ҵ��������ú��ӵ���ά�˶������е��о��ɹ��Բ���������������������ˮ���IJ��������Ͷ���ѧ��������Ҳ��Ϊ����ˮ��ѧˮ��������ѧ�Ʒ�չ���ٵ��ش���ս֮һ[7,8]��
����Ŀǰ������Դ���ˮ�����̸���ˮ������������о���Ҫ������ģ��ʵ�顣���ܶԵ������о��Ѿ�ȡ���˷ḻ�ijɹ���Ȼ������ˮ����������˵����������������������ԵIJ���Ҳ��������[8]����ͳ������ʽ������������йܡ���ѧ�����������ǣ�ADV���ͼ�������������ǣ�LDA�������ڴ������ݵIJ���Ӱ����������ڸߺ���ˮ����[9]����ǰ�о���Ա�㷺ʹ�õIJ����豸Ϊ����ʽ�ĵ���ʽ̽�����̽��[10]���������źź����������ܹ�ʵ�ֲ���ˮ���������Եı���������ˮ�������ٶȺ���������[11,12,13]��Ȼ�����ֲ��������ľ���������ֻ���ˮ���������ļ�һС��������в��������Է�ӳ����ˮ���ڲ���ά������ά����������������ˮ���е����ݴ��ڲ��ϵķ��ѡ��ϲ����ۼ����������뵽ˮ���е�̽���Ȼ��һ���̶���Ӱ�����ݵĴ�����ʽ�����ݵĶ���ѧ���̣�����Ӱ�������IJ�����
����������������ʽ̽�룬����ͼ��ʶ������ȷ��ˮ�������ķ����ڽ���Ҳ��������չ����Ȼ���ﵽ����ʽ̽��IJ������ȣ��������������һ�γ���ȫ�����ٶȷֲ������й�����Ӧ��ǰ����Ŀǰ��ͳ�ķ������ԵĻ���ͼ��ʶ����ҪΪ���ӳ�����ټ�����PIV��[14,15]������ͼ�������ǣ�BIV��[16,17]�����Ӹ��������ǣ�PTV��[18]��Ȼ��PIV��������ˮ�����ݺ��ٵ������BIV��PTV���ܹ��ṩ�����ٶȳ��ֲ������������ݶԹ��ߵķ�������Ӱ��ʾ�����ӵĸ���[19,20]��������о���ʾ��������Ӿ�����Ĺ�����[21]��ͨ������ÿ�����ص������ģʽ�ı仯���ɵõ�ȫ�������ٶ���Ϣ����ˮ�������������ϵ�Ӧ���ܹ��ṩ��BIV�൱����������BIV�Ĺ۲⾫��[19,21]���������������ŵ�����̻��߷ֱ����ٶȳ�����������ͨ��ÿ�����ص����ȵı仯���ɵõ����ܵ��ٶ�ʸ�������Ӷ���һ������ǿ����ˮ�����������ԣ�Ŀǰ�ѳɹ�Ӧ���ڸ�������ˮ���У���ˮԾ[22,23]������[24,25,26]��ӿ��[27,28]������[29]������[19,30]����Ȼ����[31]�ȡ�
������ˣ�������ּ�ڸ�����������ˮ�����̲���ˮ���������ӻ��е������о���չ���������ٵ�ǰ�����⡣��һ���ּ�Ҫ���ܾ���Ĺ����㷨ԭ�����ڶ������������������ڲ���ˮ���������ӻ������½�չ���������ֲ������������ٵ���ս���д��о������⡣
����1�� ������ԭ��
����������һ�ֶ�ά��˲ʱ�ٶ�ʸ��������ͨ�������������ά�˶������ڶ�άƽ��ͼ���ϵ�ͶӰ�������ģ�����Ϊͼ��ƽ������ģʽ�ı����˶���������˶����ͨ��ƽ����ÿ�����ص��˶�ʸ���ļ���ȷ������ͼ1��ʾ����ά�������άƽ��ͶӰ֮��Ĺ�ϵ��������������1950��GibsonΪ����ͼ��ģʽ�˶����ٶ������[32]��������Ч�Ĺ�����������1981��Horn��Schunck��HS������[33]�Լ�Lucas��Kanada��LK������[34]�ڼ�����Ӿ�����������ļ��㷽�����ֱ�����ȫ�����������;ֲ��������������������ַ���ʹ�õ�ǰ�ᶼ�ǻ�����֮֡��ͼ�����ص����ȱ��ֲ���ļ��裬����Ϊ����һ���Լ��衣��������ͼ��ȫ������HS������Ϊ���Ժ���Ҫ�ļ���������ľ��䷽��[35,36,37]�����ɴ�����������Ƚ����㷨����������ォ��Ҫ�����뾭���HS�����㷨���Խ��ܡ�
���������˶��������ص��������˲ʱ�˶�������Ӧ���ֺ㶨���ɵõ�������ѧ����ʽ
����I(x,y,t)=I(x+uΔt,y+vΔt,t+Δt)��1��
����ʽ�У�uΪ�˶�Ŀ����x����Ĺ���ʸ����Δx=uΔt��vΪ�˶�Ŀ����y����Ĺ���ʸ����Δy=vΔt��x��y�ֱ�Ϊͼ���ϵ�һ��������ˮƽ�������ֱ�����λ�ã�I(x, y, t)Ϊ��ǰͼ��֡������λ��(x, y)���ĻҶ�ֵ��I(x+Δx, y+Δy, t+Δt)Ϊ����������һ֡ͼ������λ��(x+Δx, y+Δy)���ĻҶ�ֵ��
����HS��������һ��̩��չ�������Ի���1��ʽ�Ⱥŵ��ұ���[33]��ͬʱ���ݻҶ�ֵ�����Լ��裬��Δt→0ʱ���ɽ��Ƶ����±���ʽ
����u?I?x+v?I?y+?I?t=0��2��
������ʽ���������Ĺ������������ʽ��Ҳ��Ϊ����Լ�����̡���д�����µ�ʸ����ʽ
����?I?w+It=0��3��
�������ڹ���ʸ��w = (u, v)�������������������ʽ��3������������һ����ѧ�ϵ�Ƿ�����⣬��Ҫ���������Լ�����̲�����⡣
����ͼ1 ��ά�˶��������άƽ��ͶӰ֮��Ĺ�ϵ��ͼ
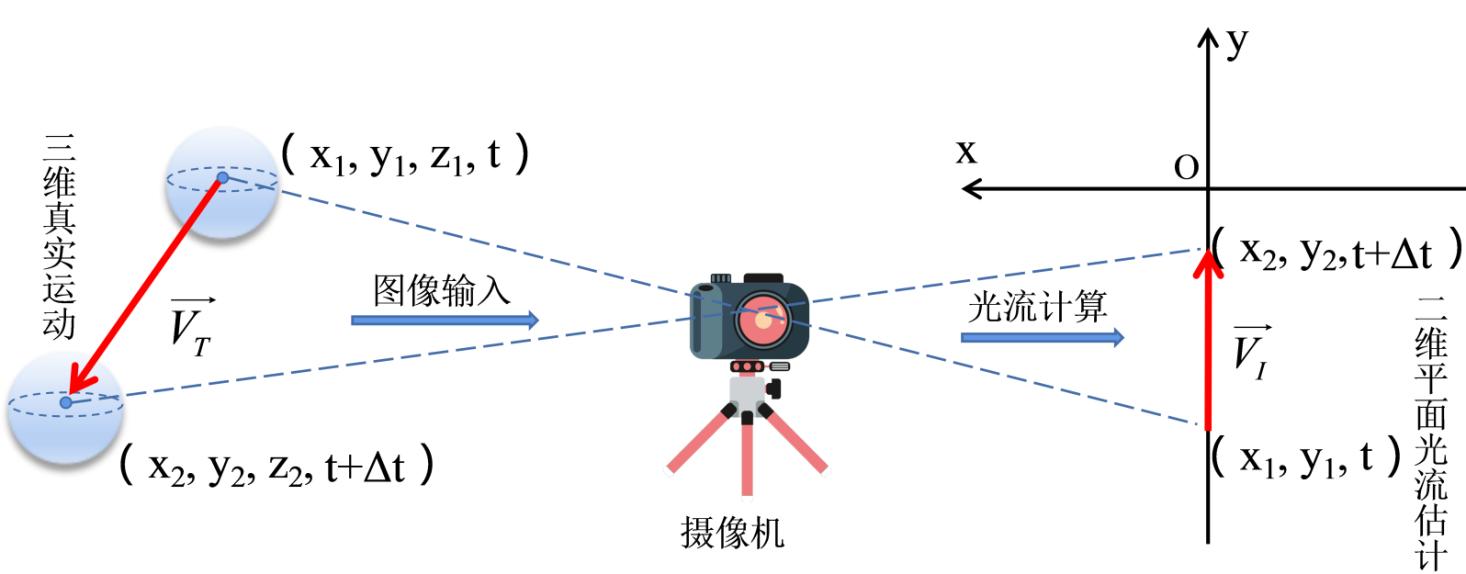
����Fig. 1 Sketch of the relationship between 3D moving object and 2D plane projection
����HS������Ϊ��������һ����ԭ�����ܵ��¹���������������������������ƽ���Լ���������ʸ��������һ���̶��㣨x, y��������һ������?2u+?2v�ڵĹ����仯Ӧ�����ܵ�������0��������������ֵʱ��Լ������������ѧ�ϱ���Ϊ
����|?u|2+|?v|2=min{(?u?x)2+(?u?y)2+(?v?x)2+(?v?y)2}��4��
�����ۺ�ʽ��3����ʽ��4��������һ��ȫ������Լ������������u����v�ļ���ɱ�Ϊ���µı������
����E(u,v)=?(Ixu+Iyv+It)dxdy�٭ڭحۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭ�������+?α2(|?u|2+|?v|2)dxdy�٭ڭحۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭۭ�ƽ���5��
����ʽ�У�α��һ��ƽ�ⳣ��������ƽ��ǰ��������������������Լ��������һ��Խ���αֵ��Ӧһ��Խƽ�����˶�������ͨ����С����5��ʽ������Լ���������������һ���ص�Ĺ���ʸ�����ɲ��õ����ķ�ʽʵ�֡�����HS��������ʵ�֣��������ܵ�˲ʱ�����ٶȣ����Ǵ������²��㣺1��HS��������������ƽ����Լ���������ᵼ��������״������Ϣ��ȱʧ��2����������һ����ԭ�����������ȵı仯���˶���ģ�����¸ü��費�׳�����3��ֻ�������˶�λ�ƽ�С���˶����[38]��4����ͬ����Ƶͼ������в�ͬ��������һ���̶���ƽ�ⳣ�������Dz����ʵ�[39]��
����2 ���������ڲ���ˮ�����������е�Ӧ�ý�չ
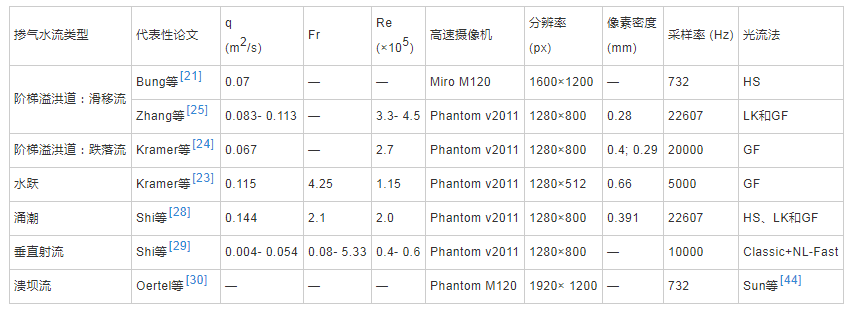
�����Դ�1981��Horn��Schunck�������Ĺ���˼����ȷ���˶�Ŀ�����Ϣ������40����������һ˼�����������Ľ��ķ������������Ƚ��Ĺ������㷽���������㷺��Ӧ�õ���ҵ����ʵ���е���ͬ������������Ӿ�[40]����Ƶͼ��ѹ������ͻԤ�⡢ͼ��ָ������ѧ�˶�����[41]�ȡ������������ˮ������ˮ���������е�������Դ��2016��Bung���о���Bung��[21]ʹ�þ����Horn-Schunck�������ͼ���˲������ɹ��IJ����˽��������ϲ���ˮ���Ĺ����ٶȳ������ں������о��б������������������ͼ����ٷ�������PIV��BIV�������൱�ľ�ȷ��[42,43]�����������ص��ǹ�������ÿ�����ص����ṩ���ܵĸ߷ֱ����ٶȳ��������˹�������ˮ�������������еľ����ơ�����о���Աʹ�ù�������չ����������ˮ���IJ�������ˮԾ[23]��ӿ��[19,28]������[29]��������[30]�ȣ�������һʱ��Ϊˮ������ˮ���������������ŵ��о�����֮һ����1�ܽ��˹������ڸ����Ͳ���ˮ��Ӧ���еľ��д����Ե��о������У�qΪ�����ĵ���������FrΪ�������͵�����Fr = V/(gd)0.5��ReΪ������ŵ����Re = ρVd/μ��V��d�ֱ�Ϊ�����ٶȺ�ˮ�gΪ�������ٶȣ�ρΪˮ���ܶȣ�μΪˮ�Ķ���ճ�ȣ������ܶȴ���ͼ����ÿ�����ش�����ʵ�ʾ��롣
������1 �������ڸ����Ͳ���ˮ��Ӧ���еĴ������о�
����2.1�� ���õĹ�����
����û���κ�һ�ֹ����������ڲ�ͬ�������������ͼ�����У���Ӧ��Ϊÿ��ͼ������ѡ���ʺϵĹ�������[45]����ˮ��������������Bung�״�ʹ�þ����HS��������ȷ��������������ˮ���Ĺ����ٶȳ��������о���Ա��ʼ����ʹ�ö��ֹ����������õ���ͬ���͵�ˮ����ʩ�IJ���ˮ���У�������Ա�������˸��ֹ��������������벻�㡣
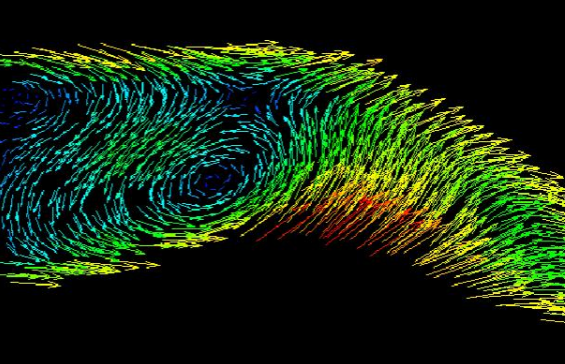
������ͬ��HS������ͼ���ϵ��������ؽ���ȫ�ִ�����һЩ�ֲ��ķ���������LK����[34]��Gunnar-Farneback��GF������[46]������ͼ���ÿ�����ش���������ѡ�����ع̶�����Χ��������й������㣬��������HS������˵���������и�Ϊ³�������ܡ�LK����ѡȡ���ص���Χ��һ������������������������һ��������Ȼ��ʹ�ü�Ȩ��С���˷��������е������������������̣�����ʽ��2���������ּ����ǰ����Ŀ������ǰ����֮֡���λ�ƺ�С�����������ص�������ھ����˶�һ����[34]��GF������Farneback��2003�������һ�ֻ����ݶȵķ���������ͼ���ݶȺ㶨�Ҿֲ������㶨�����ö���ʽ��ÿ�����ص�������Ϣ���н��Ʊ�ʾ���ɼ����ͼ�����������صĹ���[46]�����GF�������ж�����³���ͼ�����ܹ����������ƣ����Ҿ��и��ߵļ��㾫�Ⱥͼ���Ч�ʣ����㷺��Ӧ����ˮ���������Ĺ�����������[19,22,23,27,28,47]����ͼ2��ʾ��Kramer��[23]����GF������ˮԾˮ�������ٶȵ��������ӻ���ʾ��χ��ʾ����ˮԾ�������ˮƽ���롣
����ͼ 2 GF��������ˮԾ�е��˶��ٶȳ����� ����Դ��Kramer��[23]��
![ͼ 2 GF��������ˮԾ�е��˶��ٶȳ����� ����Դ��Kramer��[23]��](http://www.xueshut.com/uploads/allimg/210605/36-21060511042I44.jpg)
����Fig.2 Estimation of velocity field in hydraulic jump by GF optical flow method (Taken from Kramer et al. [23])
����ͬ���أ����ڿ��ǵ�HS�������������������ԣ�Sun��[44,45]���ھ����HS����������������������Ƚ��Ĺ����������ұȽϺ��о�����Щ�����������������ơ�Oertel��[30]����Sun�ᵽ��9�ֹ������������˶�ά�������е��ٶȳ�������PIV���ٺ��ֶ����Ӹ��ٲ��ٽ���Աȣ�������֤���˹��������и�С�������ṩ���ܶȵ��ٶ���Ϣ���������ļ��ֹ�������ȣ�OF8��Classic+NL-Full��������ʾ���˸���ƽ�����ٶȷֲ����ߵ�ȷ�ȡ�Shi��[29]Ҳ����Sun�����һ���Ƚ��Ĺ�����“Classic+NL-Fast”�������˴�ֱ�����Ķ�ά�����ٶȳ������ּ������ھ����HS�����и���һ��³������ֵ�˲�ǰ����������ʵ�ֵģ�Ȼ��ȴ�����˼���ɱ�����2��̵��ܽ���Ŀǰ�ڲ���ˮ���г��õĹ����������ص㡣
������2 ˮ�������������ù������ܽ�

����Zhang��[25]�����ڽ���ʽ�������ٲ���ˮ�����������־ֲ������о������������������ʽ��LK�������ʺ��������������˶���·������ŷ��ʽ��GF���������ʺ����������ٶ�������ͬʱ�����֤���������ʽ̽����������Աȣ���֤�˹������Ŀɿ��ԣ���ͨ��GF���������˽�������ˮ��������ǿ�ȡ��������Ķ��ܡ�����ͬ���IJ������ã�Zhang��[26]����GF��������˽��������ϲ��ֽ��ݿ�ǻ���ʵ��ģ���ϻ������������ֲ������������Ľ��ݶԱȣ�����������ģ�͵�ƽ��Ӧ���ʺ�����������ǿ�Ⱥ��Ķ��ܳ����Լ������������Ⱥ�ʱ��߶ȵIJ��죬ͻ���˽��ݲ���ˮ����ǿ�����Ժ����������ԡ�
�������н��е�ӿ���о���Shi��[28]ͬʱ����HS��LK��GF���ַ���������ˮ����������˲ʱ�����ٶȳ�������������ֹ��������Ľ��������һ�µģ�������ˮ�۵ĵװ帽����ˮ���������ڹ������ȵı仯����HS����������һЩ������Ľ����ͬʱ����������������ֳ��������ԣ���֤��HS�������������dz����С��������ֱ����ֵģ�⣨DNS���ͽ������㶨��֤������������ˮ���������Ĺ���������GF���������Shi��[47]��������GF�����IJ���ͬʱ���������ֲ�ͬ��ˮ���������������̬ˮԾ���ȶ���ֱ�������н�����ӿ���������˹���������ˮ���������ٶȱ����е�����������֮�⣬��ӿ�����ɱ����ȡ��������ķ�ʽ��Wüthrich��[27]����GF����������ӿ�����ɱ���ˮ��������Ŀ��ӻ������ٶȳ�����������ˮ����������ٶȷ�ֵ��Զ������������ķ�����С�������������ɱ���������������ԡ�
����2.2�� �������Ĺؼ����⼰��������
��������ڹ����������������Ӧ�ã��������ڲ���ˮ��������Ӧ��Ҫ���ӵĶࡣ���ȣ�ˮ����ʩ�еIJ���ˮ�����ڸ����˶��У����ִ�λ�Ƶ��˶������˹������Ŀ�չ����Σ��ڽ���ͼ������ʱ�����Ȳ����ȡ����ݶԹ��յķ��䡢���㾰���ˮ���������ƶ������渽��Һ�ε����ⶼ�������������������ɹ����������㾫���½������⣬�ڹ�������ʱһЩ�ؼ��IJ���������ͼ���������Ҳ�Խ����ɺܴ��Ӱ�죬��������ʺͲ���ʱ�䡢ͼ�����ص�����ֵ���������������������ֲ������С���˲������ȡ����ڶԹ������ڲ���ˮ��Ӧ�������ٵĹؼ����⡢��Ӧ�ĸĽ������Լ�����ز����ʹ�����������������
����2.2.1��ͼ����������
��������ͨ��������������ṹ���豸�¶ȱ仯����Դǿ�ȱ仯�����ؽ��뵽ͼ���еģ��������Ź����ļ����ۻ�����ǿ��Fermuller��[48]ָ����ͼ���������¹�����ֵ�ͷ���ĵ���������ͼ���ȡ�˲��������Ƴ���������ǿͼ��ṹ�ķ�����Ŀǰ��Ҫ���õ��˲������и�˹�˲�[33]����ֵ�˲�[45,49,50]��˫���˲�[51]�Ϳ������˲�[52,53]��Song��[54]�����һ������ȥ��ķ�������һ�����ø�˹�˲����Ƴ���Ƶ�������ڶ���������������ȥģ��������Buades��[55]���÷Ǿֲ����˲�����ȥ�룻Liu��[56]�����һ������Ӧ��ȥ���㷨�������ϵ��������������Ƴ���������żȻ����������������
����Barron��[36]�о�����HS��������������ֲ��ķ�����˵��HS��������ͼ��������������У�Ȼ��HS�����������Ƚ��Ĺ��������Ļ���������Ϊһ��ȫ�ֵķ����ܹ����ͼ��ƽ��ÿ�����صĹ��������Ӷ��ṩ���ܵĹ����ٶ�ʸ�������ڽ��к��������ķ���������о���Ա�Դ�Ҳ�����˸Ľ�����ʽ��5����α��ѡ��dz���Ҫ����Ϊ�����Ĵ��ڻ����������������ƽ�����Ȩ�أ��Ӷ����ؼ�Сƽ���ij̶�[57]��ͨ����˵α��ȡֵΪ1����Shi��[28]�����Է�������αȡֵΪ2������ʵġ�Ϊ�����ƽ�����������쳣��Ⱥ���ݡ����ֱ߽粻�����ԡ���������������Ϣ���������о���Ա���ƽ��������˷Ǿֲ�����[45,58,59]��ʱ������[60,61]�����ͼ����[62,63]�ĸĽ�������
����2.2.2 ��ͼ�����ȵı仯����
������Բ���������һ���Լ������⣬�����³���ij���Լ��[38,63]�� �����ṹ�ֽ�[64]����ɫ�ռ�[60,65]���ַ�����Parenberg��[38]�����������߽ij���Լ��Ҳ�Ƿdz����õģ����к�ǿ��³���ԣ�����Hessian��Laplacian����Լ����Mohamed��[66]��������������һ��³���Ļ��ھֲ��������������ȳ���Լ����Wedel��[67]������ͼ��ֽ�Ϊ�ṹ������������������������Ϊ�ص㣬��������������ؽ���ͼ��Golland�Ȼ����˶��µ���ɫ��Ȳ����ԣ�������HIS��ɫ�ռ��RGB���Ⱥ���������ɫ�����������ͱȽ��˶��Ĺ�Ȳ����ԣ�Weijer��[68]�о��˹�Ȳ���IJ��ȶ��ԣ������һ���µĻ��ڹ�ȱ仯�Ĺ����������������������ƶ���Դ�仯��ɵ�ͼ����Ӱ�ƶ�����Ӱ�仯�;��淴�����⡣
����2.2.3�� ��������
����Liu��[69]ָ�������������Ҫȡ����������֮֡���ʱ�����Լ�ͼ��������ݶȡ���һ����ʱ�����£�����������ݶȶ�Ӧ��С�Ĺ������������ң���������ȷ��������ͼ�����ȵķֲ��������ʽ̽�����ݵ��������Ƚϱ�����ԭʼͼ�����������ֵ��ԼΪ100-150����ʵ�ָ�ȷ�Ľ��������С������ֵ��Ӧ�ڸ�������[21]��ͼ��IJ���֡�ʣ���������֮֡���ʱ����ͬ��Ӱ����������ȷ�ԡ�Zhang��[25]��Kramer��[24]�������Է������������Ҫʵ���������Եı���������5000Hz�IJ���Ƶ���DZ���ģ���������ʱ��Ӧ������10�����ϲ��ܵõ�����ȷ��ˮ��������ʱ��ƽ�����ԡ�Ȼ�����ߵIJ���Ƶ�ʺ�ʱ���Ӧ���������ݴ洢�ߵļ���ɱ�����ʵ��ʱӦ������������ߵĹ�ϵ��
����2.2.4 ���˶���λ������
����������Ӧ�õ�ǰ����������Сλ��Ŀ�������˶����裬���ڴ�λ�Ƶ��˶����ܻ�����ϴ�������ƣ�����һ�ֶ�ֱ��ʵ�ͼ��������������ܺܺõĽ����λ���˶����⡣ͼ������������ǶԵ�һ��ͼ��ʹ��ͬһ���˲����������Ƕ�һ��ͼ��ʹ�ö����˲�����[70]��ͼ���������ԭ����ʹ��һ���������Ӷ�ԭʼ����ͼ�����ţ��γ�ģ�����Ľϵͷֱ���ͼ��Ȼ������ɵ�ͼ���ٴ�����ͬһ���������Ӽ������ţ��ظ�����֮��õ��˷ֱ���Խ��Խ�͵�һ��ͼ����ԭʼͼ��Ϊ�ײ������������м��ɹ���ͼ�����������ʵ�ϣ��������������ͼ��Ŀռ�Ƶ���Կ������������ϲ�ͼ��ֱ�����С��������λ�������������ʱ�ӽ�������㿪ʼ����һ����⣬ÿһ��õ���ʸ��ֵ��Ϊ��һ�����ij�ʼֵ��������������������ͽ��������ʵ����λ��“�ɴֵ�ϸ”�ļ���[45]����ͼ3��ʾ������������ͼ����ж�ֱ��ʲ������̡�Anandan��[71]��1987�������ڱ��ģ�������뵥���ϸ����ʽ����������ٶ�������֮��ͼ�������˼�뱻�㷺�����õ���λ�Ƽ����С�Bruhn��[72]��Zimmer��[60]���ͼ������������һ���Ƚ��ĴӴֵ�ϸ�ı��μ�����˫�����������
����ͼ3 ��ֱ���ͼ�������ʾ��ͼ����Դ��Shi��[28]��
![ͼ3 ��ֱ���ͼ�������ʾ��ͼ����Դ��Shi��[28]��](http://www.xueshut.com/uploads/allimg/210605/36-2106051102252I.jpg)
����Fig .3 Sketch of multi-resolution image pyramid (Taken from Shi et al.[28])
����2.2.5 ��ͼ�����������ѡ��
����Bung��[21]����HS�������������������ˮ��ʱ���Խ����������������Է�������5��������ɵõ�һ����Ϊȷ�Ľ�������϶���߽��ٵIJ�������������������ٶȲ�������������GF��������ʱ��Bung��[73]�õ������ƵĽ����Ȼ��Kramer��[24]�����Է��������������IJ���������Ӱ������ٶȳ��ķֲ�������ì�ܿ���������Kramer������˶�λ��С��Bungһ�����������µģ��Ͼ�Kramerʹ�õIJ���Ƶ������Ϊ5000Hz����Bung�IJ����ʽ�Ϊ732Hz���ں�����ˮ���������о�������ʹ�ýϸߵIJ����ʣ�2��Ľ��������ձ�Ľ���[19,23,28,47]������֮�⣬���ϲ��������ͼ��ֱ���Ҳ��һ���Ĺ涨��һ��������ԭʼ����ͼ��ķֱ���Ӧ�������������ͼ��ֱ�������ϡ�Bung��[21]�����������������ͼ��ֱ�ӦΪ25�������ң���������[45]�Ƽ���20-30����������ֵ������һ�µġ�
����2.2.6���˲������;ֲ�����ѡ��
����Ϊ���Ƴ����ݺ�Һ�ζԹ�ķ�������IJ����ȹ��գ�Kramer��[24]��ad-hoc�˲�����ʩ�ӵ����������ǰ�����У����˳�ͼ����������Ϣ�ͱ�Ե����ֵ�˲�����˹�˲�����ֵ�˲�Ҳ���㷺����������ͼ����������Ⱥֵ��Sun��[44]������ֵ�˲����˲��ߴ���5×5���أ���Bung��[21,43]�ں���ˮ���о��б�����ֵ�˲��ijߴ��Լ��15×15���ء�Kramer��[24]�����˾�ֵ�˲��ijߴ�Ϊ10-15���أ�Wüthrich��[27]��˹�˲��Ĵ��ڴ�СΪ15���ء�һ����С���˲��ߴ���������ߴ����ɹ����ٶȳ�����IJ���[23]������GF�������ֲ�����ߴ��ѡ��Kramer��[24]�����Է�������1-5���صľֲ������С�Ǻ��ʵģ�Zhang��[25,26]���õ������СΪ7���أ�Shi��[28] �����������ѡ��5���ز�����С������LK�����ľֲ������Сȡ20-25���ز�������ʵġ�
����2.3 ��������������ͼ���������Ƚ�
����Ŀǰ�������ٶȵIJ�����ʹ�õ�ͼ��������ͨ��ΪPIV��BIV��PTV��������PIV����ͨ������ˮ�������������Ӷ����������Ȼ���ڲ���ˮ�����������ݶ����ӵ��ڵ���������ʧ�����ӵĸ��٣����PIVֻ�����ڲ�����ˮ�����ݷdz��ٵ�������PTV��һ���������յķ�����ʹ�ù���ʾ�������������ٿɵõ����ӵ��˶��켣���ٶȡ�Ȼ���������ݶԹ��ߵķ��䣬���װѾ��й�����״�����ݵ������Ӷ����٣�Ӱ�����ȷ�ԡ�BIV����PIV�Ļ����Ϸ�չ�����ļ������������ͼ����Ӱ�����Լ�PIV��������֡������Բ��ټ�����������ͼ����ͼ����ˮ��������������“����”�������������PIV����һ����������ʾ�����Ӷ���ֱ��ʹ��������Ϊ�������ӣ���˿����ڲ�������ˮ�����ٶȳ���
����Ŀǰ��������BIV�Ա��о����������߶��ڿ̻�����ˮ���ٶȳ��Ľ��������һ�µģ����ۺ������������Բ�������ı�����Ϊ³��[21,42]�����и߷ֱ��ʵ�ͼ���ܸ��õر�����������������������������DZ���ȫ�ֳ����ٶȳ����������ɻ��ͼ����ÿ�����ص���ٶ���Ϣ���Ӷ�������һ����չ���ڲ������������о�����ͨ��BIV��������˽ϵ�ͼ��ֱ��ʣ�����������ݵIJ�����������ѯ�ʴ��ڴ�С��ѡ����ܻᵼ��λ������ƫ����������ֵ����Ϊ“��������”[74]������������ִ���ο�˹�ز������������ǻ�������͵�λ�ƹ��ơ���������һ���ֵķ�������BIV��һ�ֻ��ֺ�ͳ�Ƶķ���������ڹ�������BIV����Ч�ʽϸߡ�
����3�� �������ڲ���ˮ�����������е�ǰ������
�������ڲ���ˮ���������Ƴ����ĸ����ԣ����¹��ڹ�������������Ҫ��һ���о���
������1������һ�������⡣��������Ϊһ���ֵķ�����Ӧ�ù���������Ҫ���ǵ�������ͼ�������������⣬���ȵĹ���ǿ����Ӧ�ù�������ǰ�ᡣȻ�����ڵ�ǰʹ�õij�����ˮ����ʩ�еIJ���ˮ����һ��������ܵ�ˮ�Ϳ����ķ�����ɾֲ��Ĺ��ղ����ȣ���һ�������ײ�������������ˮ���ĸ��ź��������ɹ��߷��䡣��Σ����������˹������������ݶ���ѧԭ�����ǰ��������ݵľۼ����ϲ������κ����飬�������ͼ������Ŀ���������ǿ�ȵı仯�������ˮ���в���Ũ�Ⱥ�����Ƶ�ʵķֲ�Ҳ��Ӱ���������Zhang��[25]ָ��������Ũ�ȴ���50%ʱ���������µļ��������������ŷ���Զ���ڵ���ʽ̽��IJ����������ͬ�������������ϱ�����������ɽ���Һ�λ����������IJ������渽�źͲ����ȵĹ�������ģ�Ȼ���������ǰ���о���ȴ��û�б���ȷ��
������2���߱�ЧӦ���⡣�����������õ����ڸ���������������ı߱�����IJ���ˮ��ͼ�����У�Ȼ�����ڱ߱�Ħ�������Ĵ��ڣ��谭�˱߱ڸ�������ˮ��������ɽṹ���γɺͷ�չ�������˲�ͬ�����������������̬�����±߱ڸ����IJ���Ũ�ȡ�����Ƶ�ʺ��ٶȷֲ���������������10-40%[24,25]����ˣ����ڱ߱ڼ�¼�Ĺ����ٶȳ��ܷ�����ڲ�ˮ������������̬��Ȼ��Ҫ��һ�����о�����Ҳ���������ڱ߱ڲ����ļ�������PIV��BIV��PTV��ͬ����Ҫ�ش�����⡣
������3������Ӳ�����⡣��õĹ��������ݵ�������ֱ��������ʱ�ĸ������������ͷ��Դ��Ӳ����ʩ������������صġ����и߷ֱ��ʺ߲���Ƶ�ʵij�����������������õ����ͼ���Ϊȷ�Ĺ����������Σ���ͷ��ѡ���ǹؼ��ģ�һ�Ǿ��п��ٶ������ܣ���������ʹ�ø��̵��ع�ʱ���ø�������Ŀ�ꣻ������С��ͼ��ʧ�棬���������̹�������ʱ������ʱ�䡣���Դ��Ч��ͬ��Ӱ��������ݵĺû�����ͬ���͵IJ���ˮ����Ӧ�ڲ�ͬ�Ĺ�Դ���ã�����ʽʵ��ǰ���й�Դ�������������ﵽ���ŵĵƹ�Ч���Ƿdz���Ҫ�ģ�����������Ҫ�䱸��ǿ���ȵ�LED��Դ���С�
������4������Ч�����⡣���������ø��ӵı�ַ�ʽ���м��㣬����Ч�ʵ��£������ŵ�����������������ʱ��ɱ����ӡ����⣬ʵ�ָߺ���ˮ������������Ҫ�߲���Ƶ�ʵ���Ƶ���У�������ͼ���ڴ���ʱ���ɽ�һ�������˹������ļ���Ч�ʣ���ʵ���˶���ʵʱ�����������չ�����Ļ��ھ��������磨CNN���Ĺ������Ƽ�����Ȼ�ܹ�ʵ�ָ��ߵļ����ٶȺͼ��㾫��[75]��������Ҫ������������ѵ��ģ�ͣ��Ҽ����ϻ��������졣�����߲���ˮ���������ƹ����㷨�ļ���Ч�ʣ���δ����Ȼֵ�ô����о���
������5�����������������⡣Ӧ�ù������������˲ʱ�Ĺ����ٶ����ݣ��Ӷ����Կ����������Եļ��㣬������ǿ�ȡ��������ֳ��Ⱥ�ʱ��߶ȵȡ���ĿǰΪֹ�������������Լ����Ѿ�ȡ����һЩ�ɹ���Ȼ�����ڹ������������ڵ�һЩȱ�ݣ����ܲ���ȷ�ı��������ṹ������LK��������ֲ������ڵĹ���ʸ�����ֺ㶨��������������������ȳ߶�С������ߴ�������ṹ���ܻᱻ���ԡ�GF�����ܹ�����ÿ�����ص�������������ԣ������DZȽϺ����ķ���������ȴ��ȫ������ƽ�ƺ�Ķ��ζ���ʽ����HS�������ڶ����������������ڲ���Ӧ�õ�ˮ�������������ٶȳ��ļ����С���ˣ������������������Եı�����δ����ֵ�ý�һ���о��ķ���֮һ��
����4������
�������ڹ�������Ŀ�������˶����Ƽ���һֱ�Ǽ�����Ӿ������о����ȵ����ѵ㡣����ˮ�������еĸ��ٲ���ˮ����˵���������ľ�ȷ������һ��ӵĹ��̡���������ˮ������õĸ������ݶ���ѧ����������������������Ŀ�չ������ڴ�ͳ�IJ��ټ��������ڹ��������������Ƽ������ֳ�����̻����ܹ�����������������˲ʱ�ٶȳ��Ĺ��ƾ��и�Ϊ³�������ܡ�����������Ŀǰ���ڲ���ˮ���еļ��ֹ����������ص㣬�Լ��ڴ������ָ��ӳ���ʱ��Ҫ��ϸ�����IJ���������ͼ�������������ӹ������������㷽ʽ�����������ͽ�������ȷ���ϵͳ�ܽ��˹�����Ӧ���ڲ���ˮ���������ٵ����⡣����������ʹ�������ڽ�һ����ʶ���ٲ���ˮ���������ֲ�����ص����ݶ���ѧ���̵Ȼ�����ѧ���⣬Ϊˮ��й�����ܹ��̺�ˮ���������ṩָ����
���������
����[1]лʡ��,��-��,����ѧ.�ҹ��߰�й�������¼������о��ʹ���[J].ˮ��ѧ����2016, 47(3): 324-336.
����[2]��Ψ��.�߰�ˮ��ѧ��������ʵ��[J].����, 2020, 51(1): 166-173+186.
����[3]�Ž���߰�й�����ܼ����о���չ��չ��[J].ˮ������ѧ��, 2021, 1-20.
����[4]���̽�,�ξ���,���ľ�,��.й������Σ�������������о�[J].ˮ������ѧ��, 2019, 38(11): 9-19.
����[5]����Ȼ�����,��Զ��,�����ܽ���������ͺ�ɳˮ�������Ѹ���Ӱ���ʵ���о�[J].ˮ��ѧ��, 2014, 45(9): 1029-1037.
����[6]���ĺ�,��Ӣ��,�ィƽ.��ͬ�ܽ���ˮƽ�Կ��Ƶ�������Ҫˮ���ͷ���Ⱦ���Ӱ���о�[J].ũҵ������ѧѧ��, 2003, (2): 170-173.
����[7] Chanson H, Leng X, Wang H. Challenging hydraulic structures of the twenty-first century - from bubbles, transient turbulence to fish passage[J]. J Hydraul Res, 2021, 59(1): 21-35.
����[8] Chanson H. Hydraulics of aerated flows: qui pro quo?[J]. J Hydraul Res, 2013, 51(3): 223-243.
����[9] Wang H. Turbulence and Air Entrainment in Hydraulic Jumps[D]. The University of Queensland, 2014.
����[10] Felder S, Pfister M. Comparative analyses of phase detective intrusive probes in high-velocity air-water flows[J]. Int J Multiphas Flow, 2017, 90: 88-101.
����[1] Wang H, Chanson H. Experimental Study of Turbulent Fluctuations in Hydraulic Jumps[J]. J Hydraul Eng, 2015, 141(7): 040150-040110.
����[12] Shi R, Wang H, Chanson H. Bubble convection and bubbly flow turbulent time and length scales in two-dimensional plunging jets[J]. Exp Therm Fluid Sci, 2018, 98: 278-289.
����[13] Felder s, Chanson H. Phase-detection probe measurements in high-velocity free-surface flows including a discussion of key sampling parameters[J]. Exp Therm Fluid Sci, 2015, 61: 66-78.
����[14] Lennon J M, Hill D F. Particle Image Velocity Measurements of Undular and Hydraulic Jumps[J]. J Hydraul Eng, 2006, 132(12): 1283-1294.
����[15] Hornung H G, Willert C, Turner S. The flow field downstream of a hydraulic jump[J]. J Fluid Mech, 1995, 287: 299-316.
����[16] Rodriguez-Rodriguez J, Marugan-Cruz C, Aliseda A, et al. Dynamics of large turbulent structures in a steady breaker[J]. Exp Therm Fluid Sci, 2011, 35(2): 301-310.
����[17] Bung D B, Valero D. Image Processing For Bubble Image Velocimetry in Self-Aerated Flows[C]/1 Proceedings of the Proceedings of the 36th IAHR World Congress, The Hague, the Netherlands: Intermational Association for Hydraulic Research, 2015 of Conference: 6594-6601 .
����[18] Kramer M, Chanson H. Free- Surface Instabiltis in High-Velocity Air-Water Flows down Stepped Chutes[C]// Proceedings of the 6th IAHR International Symposium on Hydraulic Structures 1SHS 2018, Aachen, Germany: Utah State Library, 2018 of Conference: 55-66.
����[19] Shi R, WUthrich D, Chanson H. Air-water characteristics of a breaking bore roller Part I: Air-water flow properties[R]. Brisbane: The University of Queensland Australia, 2020.
����[20]�۽���,����ͤ,�¸գ���.ˮ���������������˶���PTV�����㷨�о�[J].ˮ������ѧ��, 2010, 29(6): 121-125.
����[21] Bung D B, Valero D. Optical flow estimation in aerated flows[J]. J Hydraul Res, 2016, 54(5): 575-580.
����[22] Wang H, Chanson H. Characterisation of transverse turbulent motion in quasi-two-dimensional aerated flow. Application of four-point air-water flow measurements in hydraulic jump[J]. ExpTherm Fluid Sci, 2019, 100: 222-232.
����[23] Kramer M, Valero D. Turbulence and self-similarity in highly aerated shear flows. The stable hydraulic jump[J]. Int J Multiphas Flow, 2020, 129: 103316.
����[24] Kramer M, Chanson H. Optical flow estimations in aerated silway flows: Filtering and discussion on sampling parameters[J]. Exp Therm Fluid Sci, 2019, 103: 318-328.
����[25] Zhang G, Chanson H. Aplication of local optical flow methods to high-velocity free-surface flows: Validation and application to stepped chutes[J]. Exp Therm Fluid Sci, 2018, 90: 186-199.
����[26] Zhang G, Chanson H. Aplication of optical flow methods to aerated skimming flows above triangular and trapezoidal step cavities[J]. J Hydraul Res, 2019, 57(4): 488-497.
����[27] Wuthrich D, Shi R, Chanson H. Air-water characteristics of a breaking bore oller. Part 1: Two-phase surface features and strong turbulence[R]. Brisbane: The University of Queensland Australia, 2020.
����[28] Shi R, Leng X, Chanson H. On optical flow techniques applied to breaking surges[J]. Flow Measurement and Instrumentation, 2020, 72.101710.
����[29] Shi R, Withrich D, Chanson H. Image-based measurements of air-water flow properties in plunging air-water jet[C]/1 Proceedings of the 8th IAHR International Symposium on Hydraulic Structures ISHS2020, Santiago, Chile: The University of Queensland, 2020 of Conference.
����[30] Oertel M, Sufke F. Two-dimensional dam-break wave analysis: particle image velocimetry versus optical flow[J]. J Hydraul Res, 2020, 58(2): 326-334.
����[31] Khalid M, Penard L, Memin E. Optical flow for image-based river velocity estimation[J]. Flow Measurement and Instrumentation, 2019, 65: 110-121.
����[32] Gibson J J. The perception of the visual world[M]. Oxford, England: Houghton Miflin, 1950.
����[33] Horn B K P, Schunck B G. Determining optical flow[J]. Artificial Itelligence, 1981, 17(1): 185-203.
����[34] Lucas B D, Kanade T. An iterative image registration technique with an application to stereo vision[C] Proceedings of the Proceedings of the 7th international joint conference on Artificial intelligence - Volume 2, Vancouver, BC, Canada: Morgan Kaufmann Publishers Inc., 1981 of Conference: 674-679.
����[35] Brox T, Malik J. Large Displacement Optical Flow. Descriptor Matching in Variational Motion Estimation[J]. IEEE Transactions on Pattern Analysis and Machine Itelligence, 2011, 33(3): 500-513.
����[36] BarronJ L, Fleet D J, Beauchemin S S. Performance of optical flow techniques[J]. International Journal of Computer Vision, 1994, 12(1): 43-77.
����[37] Baker s, Scharstein D, Lewis J P, et al. A Database and Evaluation Methodology for Optical Flow[J]. Intemational Journal of Computer Vision, 2011, 92(1): 1-31.
����[38] Papenberg N, Bruhn A, Brox T, et al. Highly Accurate Optic Flow Computation with Theoretically Justified Warping[J]. International Journal of Computer Vision, 2006, 67(2): 141-158.
����[39] Zhigang T, Wolfgang H, Wei X, et al. Weighted root mean square approach to select the optimal smoothness parameter of the variational optical flow algorithms[J]. Optical Engineering, 2012, 51(3): 1-10.
����[40]����.����5G���Ӿ�����BDS�ƶ��������ں϶�λ�㷨[J].�������ѧ, 2020, 47(S1): 631-633+652.
����[41]����ǿ,����,������.�����˶����ƹ����㷨�о�����[J].�й�ͼ��ͼ��ѧ��, 2021, 26(2): 355-367.
����[42] Bung D B, Valero D. Image processing techniques for velocity estimation in highly aerated flows: Bubble Image Velocimetry vs. Optical Flow[C]// Proceedings of the Proceedings of the 4th 1AHR Europe Congress, Liege, Belgium, 2016 of Conference. 151-157.
����[43] Bung D B, Valero D. Application of the Optical Flow Method to Velocity Determination in Hydraulic Structure Models[C]/ Proceedings of the 6th International Symposium on Hydraulic Structures, Portland, Oregon, USA, 2016 of Conference: 240-249.
����[44] Sun D, Roth s, Black M J. A Quantitative Analysis of Current Practices in Optical Flow Estimation and the Principles Behind Them[J]. International Journal of Computer Vision, 2014, 106(2):115-137.
����[45] Sun D, Roth S, Black M J. Secrets of optical flow estimation and their principles[C]/1 Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA: DBLP, 2010: 2432-2439.
����[46] Farneback G. Two-Frame Motion Estimation Based on Polynomial Expansion[C]// Proceedings of the Image Analysis, Berin, Hedelberg: Springer Berin Heidelberg, 2003: 363-370.
����[47] Shi R, Withrich D, Chanson H. Applications of optical flow technique in air-water flows[C]/ Proceedings of the 22nd Australasian Fluid Mechanics Conference AFMC2020, Brisbane, Australia: The University of Queensland, 2020 of Conference.
����[48] Fermiller C, Shulman D, Aloimonos Y. The Statistics of Optical Flow[J]_ Computer Vision and Image Understanding, 2001, 82(1): 1-32.
����[49] WedelA, Cremers D, Pock T, et al. Structure- and motion-adaptive regularization for high accuracy optic flow[C]// Proceedings of the IEE 12th International Conference on Computer Vision, Kyoto, Japan: IEEE, 2009. 1663-1668.
����[50] Tu Z, Van Gemeren C, Veltkamp R C. Improved Color Patch Similarity Measure Based Weighted Median Filter[C]// Proceedings of the Computer Vision - ACCV 2014, Cham: Springer International Publishing, 2015: 413-427.
����[51] Tomasi C, Manduchi R. Bilateral fitering for gray and color images[C// Proceedings of the Sixth International Conference on Computer Vision (IEEE Cat No98CH36271), :, 1998: 839-846.
����[52] Elad M, Feuer A. Recursive Optical Flow Estimation- -Adaptive Fltring Approach[J]. Journal of Visual Communication and Image Representation, 1998, 9(2): 119-138.
����[53] Rabe C, Miller T, Wedel A, et al. Dense, Robust, and Accurate Motion Field Estimation from Stereo Image Sequences in Real-Time[C]// Proceedings of the Computer Vision - ECCV 2010,Berlin, Heidelberg: Springer Berlin Heidelberg, 2010: 582-595.
����[54] Song X, Seneviratne L D, Althoefer K. A Kalman ilter-Integrated Optical Flow Method for Velocity Sensing of Mobile Robots[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(3): 551-563.
����55] Buades A, Coll B, Morel J. A non-local algorithm for image denoising[C]/ Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), San Diego, CA, USA: IEEE, 2005. 60-65.
����[56] Liu C, Freeman W T. A High-Quality Video Denoising Algorithm Based on Reliable Motion Estimation[C]// Proceedings of the Computer Vision - ECCV 2010, Berin, Heidelberg: Springer Berlin Heidelberg, 2010: 706-719.
����[57] Bruhn A, Weickert J, Schnorr C. Lucas/Kanade Meets Horn/Schunck: Combining Local and Global Optic Flow Methods[J]. International Journal of Computer Vision, 2005, 61(3): 211-231.
����[58] Krahenbihl P, Koltun V. Eficient Nonlocal Regularization for Optical Flow[C]// Proceedings of the Computer Vision - ECCV 2012, Bertin, Heidelberg: Springer Berlin Heidelberg, 2012: 356-369.
����[59] Werlberger M, Pock T, Bischof H. Motion estimation with non-local total variation regularization[C]// Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA: IEEE, 2010: 2464-2471.
����[60] Zimmer H, Bruhn A, Weickert J. Optic Flow in Harmony[J]. International Journal of Computer Vision, 2011, 93(3): 368-388.
����[61] Volz S, Bruhn A, Valgaerts L, et al. Modeling temporal coherence for optical flow[C]/ Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain: IEEE, 2011: 1116-1123.
����[62] Alvarez L, Sanchez J, Weickert J. A Scale -Space Approach to Nonlocal Optical Flow Calculations[C]/1 Proceedings of the Scale- Space Theories in Computer Vision, Berin, Heidelberg: Springer Berin Heidelberg, 1999: 235-246.
����[63] Zimmer H, Bruhn A, Weickert J, et al. Complementary Optic Flow[C]// Proceedings of the Energy Minimization Methods in Computer Vision and Pattern Recognition, Berin, Heidelberg: Springer Berin Heidelberg, 2009: 207-220.
����[64] Wedel A, Pock T, Zach C, et al. An Improved Algorithm for TV-L1 Optical Flow[C]/1 Proceedings of the Statistical and Geometrical Approaches to Visual Motion Analysis, Berin, Heidelberg:Springer Berlin Heidelberg, 2009: 23-45.
����[65] Mileva Y, Bruhn A, Weickert J. llumination-Robust Variational Optical Flow with Photometric Invariants[C]11 Proceedings of the Pattern Recognition, Berin, Heidelberg: Springer Berlin HeideIberg, 2007: 152-162.
����[66] Mohamed M A, Rashwan H A, Mertsching B, et al. llumination-Robust Optical Flow Using a Local Directional Pattem[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2014, 24(9): 1499-1508.
����[67] Aujol J-F, Gilboa G, Chan T, et al. Structure-Texture Image Decomposition- -Modeling, Algorithms, and Parameter Selection[J]. International Journal of Computer Vision, 2006, 67(1): 11-13
����[68] Weijer J V D, Gevers T. Robust optical flow from photometric invariants[C]/1 Proceedings of the 2004 International Conference on Image Processing, 2004 ICIP“04, Singapore: IEEE, 2004:1835- 1838 Vol. 1833.
����[69] Liu T, Shen L. Fluid flow and optical flow[J]. J Fluid Mech, 2008, 614: 253-291.
����[70] Adelson E, Burt P, Anderson C, et al. Pyramid methods in image processing[J]. RCA Engineer, 1984, 29(6): 33-41.
����[71] Anandan P. Measuring Vision Motion from Image Sequence[D]. University of Massachusetts, US, 1987.
����[72] Bruhn A, Weickert J, Feddern C, et al. Variational optical flow computation in real time[J]. IEEE Transactions on Image Processing, 2005, 14(5): 608-615.
����[73] Bung D B, Valero D. FlowCV - An Open-Source Toolbox for Computer Vision Applications in Turbulent Flows[C]/ Proceedings of the Proceedings of the 37th IAHR World Congress, Kuala Lumpur, Malaysia, 2017 of Conference: 1-10.
����[74] Corpetti T, Heitz D, Arroyo G, et al. Fluid experimental flow estimation based on an opical-flow scheme[J]. Exp Fluids, 2006, 40(1): 80-97
����[75] CaiS, Zhou s, Xu C, et al. Dense motion estimation of particle images via a convolutional neural network[J]. Exp Fluids, 2019, 60(4): 73.

��й�鶴����ˮ�����ж�ά����ά��ֵģ���о�
�������ŵ�վй��ˮͷ�IJ������ӣ���ʴ�ƻ��Ĺ���ʵ���������࣬�������ǡ���β�������Ŀ˺�������Ͽ���ι�Ͽ�����֡���̲�ȵ�վ��йˮ�����ﶼ�����ܿ�ʴ�ƻ���������ʴ��һ�ּ����ʴ�ƻ�����Ч��ʩ��Ŀǰ���㷺Ӧ�����ѽ����ڽ����̣�����ɽ���ڽ�...