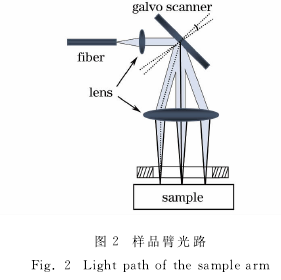
样品臂是一个可移动的小型探测臂,其外形特征为一个无盖长方体,样品臂的光路如图2所示,光纤出来的光先由准直透镜准直,准直光入射到扫描振镜上,光束经振镜反射后再由会聚透镜会聚到样品上。物镜下方焦点处有一个固定的中空铝板,中空部分为直径16mm的圆,且中空铝板下表面位于会聚透镜焦距处,在手持成像的过程中,该铝板可以确保样品表面保持在物镜焦面。
2.2算法原理。
2.2.1信号处理算法。
系统采集到OCT信号数据后,需要对数据进行光谱整形、减除直流项、希尔伯特变换、色散匹配,以及傅里叶变换等,利用Matlab进行数据的处理。
当扫频光源的波数扫描一个周期后,探测器便可采集到一次A扫完整的干涉光谱信号,系统采集到的干涉光谱信号强度为:

(1)。
式中P0为照射到样品上的光功率,z代表样品深度坐标,r(z)和φ(z)分别代表样品深度方向上反射系数的幅度和相位,S k([ t)]为光源的光功率,k(t)代表随时间变化的波数,t代表时间,R为标准静态平面镜的反射率,参数ε表示触发信号和采集卡模数转换之间的时间延迟,k0代表扫频光源初始波数,α代表扫频光源波数变化率,ε在0到采样时钟周期Tcl之间变化,且每个A扫的ε不同。首项Pr表示从参考臂返回到探测器中的光功率,即直流信号项;第二项表示从样品各层返回的光强以及样品各层之间的干涉光强,即自相关项,前两项会对最后得到的图像形成干扰背景的噪声信号;第三项表示参考臂与样品各层之间的干涉光强,即SSOCT系统探测到的干涉光谱信号的有效部分;第四项表示样品用参考臂和校正用参考臂的干涉光强,即用来校正相邻A扫之间相位漂移的部分。
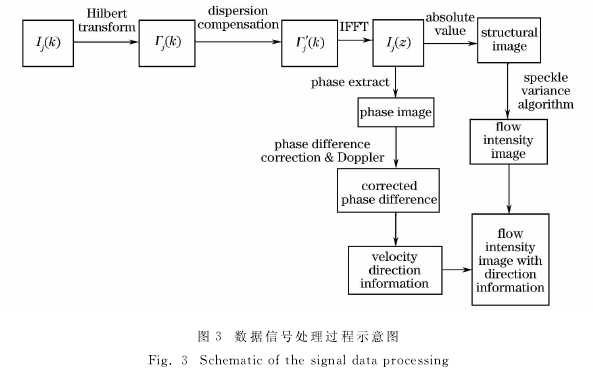
由(1)式可知z与k是一个傅里叶变换对,因此,对采集到的信号进行傅里叶变换便可恢复出样品的深度信号。为获得所需要的血流强度图像及方向图像,对数据信号进行处理,如图3所示。经过光谱整形、减除直流项得到在波数域均匀分布的干涉光强信号Ij(k),其中j为干涉信号采集过程中A扫的序数。对信号Ij(k)进行希尔伯特变换获得复解析信号Γj(k),该步骤的目的是去除结构图像中的复共轭像。再利用数值色散补偿方法对干涉信号进行色散补偿,使得SSOCT系统的纵向分辨率接近理论值,补偿色散后的信号表示为Γ′j(k)。对信号Γ′j(k)进行快速傅里叶逆变换(IFFT)即可获得与样品的深度位置z有关的复解析信号Ij(z)。对复解析信号Ij(z)取绝对值即可得到样品的结构图像,对结构图使用SV算法获取血流图像。对复解析信号Ij(z)进行相位提取获取相位图,通过相位分辨多普勒算法和相位差校正算法来获取相邻A扫的相位差进而可以获取血流流速方向图像。最后,综合运用两种方法得到具有方向信息的血流强度图,在克服两种方法缺点的同时,保留了两种方法的优点。