摘要:分析铁路企业技术创新特征以及实现技术突破的动力。围绕提升企业核心竞争力、智能建造水平,以协同创新平台为基础,构建相适应的铁路企业创新路径。依托实际工程,介绍某特大桥梁几项智能建造关键技术的创新实践。
关键词:智能建造; 铁路施工企业; 产业链; 协同创新; 创新体系;
Technology Innovation Practice of Railway Construction Enterprises under the Background of Intelligent Construction
XIA Xiaogang
Tianjin Construction Engineering Co.,Ltd,China Railway First Engineering Group
Abstract:This paper analyzes the characteristics of technological innovation of railway enterprises and the driving force to achieve technological breakthroughs.Focusing on improving the core competitiveness of the enterprise and the level of intelligent construction,based on the collaborative innovation platform,constructs the suitable innovation paths for railway enterprises.Relying on actual engineering,introduces several key technology innovation practices of intelligent construction of a super large bridge.
智能建造是信息化、智能化与工程建造过程高度融合的创新建造方式,涉及工程的全生命周期,是企业实现高质量发展、转型升级的必然之路。
在智能建造方面,铁路施工企业尚处在碎片化的尝试阶段,缺少系统性的集成创新。铁路企业的创新多是基于项目进行的,由于工程项目的一次性和生产区域的离散性、组织的临时性,致使创新效率低、创新持续性弱;在智能建造的推进方向上存在“时尚化、标签化”的表象,将创新理解为抄近路、走捷径;主观意识上,缺少守正笃实的精神,没有用工业化思维去发展智能化;在发展策划方面,缺乏整体统筹和顶层规划,科技攻关投入少,缺少产业与科技融合发展的强力推动;具体研发方面,目前研发的智能装备在实现全工序自主作业,各智能装备之间网络协同控制技术等方面研究不足。针对以上问题,中铁一局打破企业发展的惯性模式,针对铁路企业创新发展中遇到的障碍和壁垒,深入研究创新路径,确定了铁路企业创新发展的目标和实施路线。
1 铁路施工企业技术创新的动力
智能建造的本质是要求企业进行技术创新,企业创新动力可分为主观动力和客观动力,二者相互促进和影响。
1.1 主观动力因素
铁路施工企业主观技术创新驱动力来自两个方面:
(1)通过智能建造核心技术攻关,创造强劲的核心竞争力,以创新驱动带动企业转型升级。
深化关键业务板块核心技术自主创新,综合运用现代信息技术、人工智能技术实现智能化施工装备具备动态感知、实时分析、自主决策、精准执行的智能特点,打造子系统智能化以及子系统装备互联而形成的网络化、协同化智能生产模式,从而实现工程建造的智能化。智能建造能有效节约人力资源,并更好的保证施工安全和质量,有助在优势技术领域和行业前景技术领域形成突破,有效地支撑企业转型升级。
(2)优化管理过程,提高建设效率。
社会服务的多样化需求、工程建设要求的提升,工程趋于现代化、大型化和复杂化,传统的铁路工程建设管理模式已无法满足工程需要,应用智能建造技术实现融合创新,能够优化管理过程,实现智能化辅助决策,从而减少建造环境和人员操作的不确定性影响。
1.2 客观动力因素
客观方面,企业创新驱动力主要是国家或行业政策的引导,及市场因素。
(1)政策驱动力
政府通过行为引导和政策刺激强力推动智能建造,形成推动铁路企业技术创新的强大环境驱动力。
企业核心业务板块是国铁建造和城市轨道交通,与之对应的,智能高铁1.0体系架构涵盖了智能高铁技术体系框架、数据体系框架、标准体系框架等重要内容,是中国高铁开展智能化建设的重要依据;中国城市轨道交通协会发布了《中国城市轨道交通智慧城轨发展纲要》,指出促进城轨信息化、智能化,建设智慧城轨的发展目标,提出“研发适用于互联互通全自动运行系统”要求。
(2)市场因素
市场需求是创新活动的支撑点、及重要动力源泉;市场竞争决定了企业必须以优质差异化的技术和服务谋求生存和发展。
2 铁路施工企业技术创新路径的构建
技术创新路径是指实现技术突破的起点、方向、重点、过程以及方法的总称。铁路施工企业在智能建造研究及实践过程中,应做好顶层设计,构建以企业为主体、以关键业务板块为对象,以培育提高核心竞争力为目标,以项目群组为依托,打造产学研用相结合的技术创新体系,科学选择技术创新路径并进行建设与探索。在创新路径构建方面,推动多专业融合,形成基础研究、应用开发、产品制造、试验验证、推广应用有机衔接的循环系统的综合性示范平台;在创新方法方面,实施模块化创新,由局部技术优势形成体系突破,进行集成创新;在加速形成技术产品过程方面,先重功能及可靠性,后工艺,迭代改进。
2.1 技术创新的突破方向
中铁一局以高速铁路、高速公路、轨道交通工程结构为产品对象,整合产业链,以产业链中关键技术模块——便捷装配技术及一体化智能工程装备、先进智能网络传感技术与全过程信息管理技术等作为创新重点突破方向。智能建造的主要目标旨在立足于以上研究方向,通过剖析工程需求,按照“模块实施、转化高效、生产绿色、集成融合”的路径导向,促进创新链与产业链融合匹配,加快创新及成果转化的循环演进。
2.2 技术创新模块化分析
技术创新链、技术构成、技术创新行为和创新组织等均具有显着的模块化特征。技术可分为功能模块技术和架构规则技术,其中功能模块技术是实现系统特定功能的知识体系;架构规则技术则是由结构体系、接口和技术标准等构成。
2.2.1 创新链模块化
根据创新活动规律构建形成的分工明确、职责衔接、有序运行的技术创新链,具有显着的模块化特征,其构成为:创新需求——创新方向模块攻关——模块试验验证——现场试验试用——迭代优化——系统集成——产品认证或定型——成果推广应用——反馈形成新的创新需求,见图1。
2.2.2 技术构成模块化
技术任务模块化分解,模块间采用统一的标准和规范的数据接口,具备兼容性与可扩展性,实现产品的直接应用和融合应用,通过统一的平台进行系统集成。
图1 技术创新链的构成
2.2.3 创新行为及组织模块化
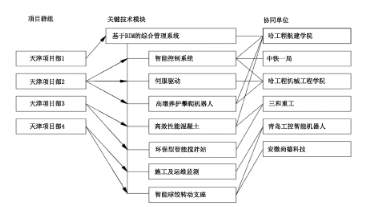
为降低创新风险,缩短创新周期,通过顶层规划,形成智能建造项目集群。充分发挥项目的载体作用,针对共性关键技术瓶颈,统筹智能建造项目群的创新研究任务,各个项目承担不同的创新模块,并行实施;协同单位之间利益匹配、分块负责。项目集群间实现协同开发,完成攻关、试验、中试、试用等环节。在某特大桥智能建造的具体实践中,对创新任务进行了模块化分解,由距离较近的项目群组实施,实现了桥梁转体智能控制,开发了超高墩变截面多功能攀爬机器人,取得了较好的技术突破,见图2。
2.3 技术创新路径
通过创新链横向渗透和纵向开拓,动态实现产业关键技术模块的突破。横向实现价值网络的集成,纵向实现从用户到智能设备、工艺、制造过程的打通;把各个攻克的技术模块有机地组合起来、融会贯通,实施集成创新。
2.3.1 功能模块重点突破路径
功能模块重点突破路径是指面向制约企业发展的关键模块技术进行重点攻关。桥梁转体技术是大型桥梁施工的关键模块技术,实现转体的智能化、自动化对确保转体过程中的安全具有关键作用。除转体工艺、球铰技术外,转体动力智能控制就是智能建造最为关键的模块技术,结合BIM技术,可实现控制进程的可视化。智能控制是必须突破的技术模块。
2.3.2 架构规则重建路径
该路径通过重新构建架构规则以及对已有模块技术再集成,实现技术创新升级。传统车载养护系统主要由喷淋系统和动力系统两大类模块技术组成,而车载智能养护系统增加了智能感知技术及智能控制技术,实现智能控制、通信、以及喷淋系统等领域技术模块的有效集成。
2.3.3 加强共性技术的基础平台建设
将基础层、支撑平台、关键技术、产品及应用五个层次的产业链条打通,构建开放协同的智能建造创新体系,牵引传统铁路施工企业的智能化转型。BIM技术是实现智能建造的共性技术。要建立起具有推广意义的BIM企业标准,推进BIM技术基础数据库建设,重点探索基于BIM技术的智能建造,围绕新型的项目管控模式,推进互动创新和持续优化。
2.3.4 加强试验验证
围绕技术创新活动中的试验验证需要,通过中试、测试等发现技术问题,不断迭代改进,缩短技术研发周期。
2.3.5 科技示范推广应用
产品技术创新与其市场盈利能力往往相辅相成,呈“螺旋性”促进。在整个协同创新过程中,成果推广应用是最终目标,也是协同创新良性循环的原动力。协同创新,内部先用,将科技成果的市场交易内部化,消除中间环节,降低转化成本,提高转化效率。
图2 基于项目群组离散技术创新点
对外推广及供货由协同主体单位统一供应、集中控制;技术协作与销售制约相平衡;减少知识外溢衍生的风险。
3 技术创新实践——基于BIM的特大桥智能建造
联合多家单位,针对某高速铁路上的桥梁施工项目,进行了创新实践。以3D GIS为基础平台,以BIM模型为纽带,对施工工序进行WBS分解,与BIM模型进行关联,以工作流驱动BIM模型,进而实现关键工序的施工智能控制。
3.1 施工仿真
基于BIM模型,利用虚拟现实技术及多媒体仿真技术可进行半实物半虚拟仿真,辅助决策。
(1)三维形象进度:
依据施工进度,基于数据驱动技术针对工点模型,实现三维场景中施工进度模拟及浏览。
(2)站场桥梁复杂工点的虚拟施工:
通过倾斜摄影技术可以获取精确的三维实景地形,结合工点三维模型、机械设备模型等,构建一个虚拟施工环境,对施工方案进行动态模拟演练,通过三维空间分析等方法,优化施工方案,减少施工成本与时间。
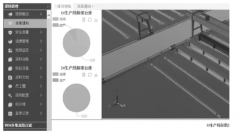
(3)物料跟踪和检测验收:
依托BIM模型,融合数字化网络化技术,实现构件产品全寿命周期信息的共享;如可自动进行成本和材料的统计分析,点击每个构件模型,可自动生成构件二维码,扫码可查询原材料及施工过程等相关信息,对特大桥装配式一体化进行三维进度管理。
3.2 转体施工智能控制
3.2.1 转体控制可视化系统设计
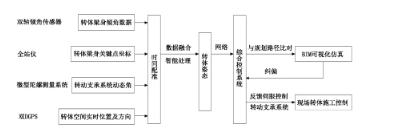
针对某特大桥,BIM平台模拟各项转体参数,开发了转体模拟功能,与现场实现了同步转体,其主要包括安装在转体的DGPS、双轴倾角传感器、无线传输数据模块等,实现转体测点三维坐标和转体六自由度位姿数据的自主感知,并实时上传至中心控制系统。云平台存储施工现场和转体BIM模型,基于VTK可视化技术,控制系统实施智能分析现场数据,驱动模型实时显示现场转体姿态。
3.2.2 转体姿态智能控制
以动态倾角传感器为核心,配备双向定位DGPS、和控制器等。差分DGPS用于确定设备关注段的坐标和高程,安装在转体上的动态倾角传感器用于精确测量转体行程以及角度,能够监测转体的姿态,安装在转体上的三维电子罗盘SEC385用于测量实时位置的坡度以及方位角。工作流程为:
(1)建立转体的预测轨迹坐标轴线;
(2)基于DGPS获取转体的绝对坐标及方向;
(3)基于倾角传感器获取转体的坐标及姿态;
(4)控制系统经信息融合,判断转体的姿态与目标轨迹的差异。
(5)根据目标差,反馈控制伺服转动支承调节转体姿态。
通过将转体坐标系原点平移到定位DGPS天线位置实现基准点标定,然后通过旋转使转体坐标系三轴与地理坐标系平行;在得到该坐标后,根据单轴倾角传感器测得的倾角,以及转体的长度,推导出转体端点的地理坐标。转体姿态控制流程见图3。
3.3 变截面超高墩的综合维护攀爬机器人
针对超高墩综合养护、应急救援、检测,研制了应用于变截面超高墩检测及综合维护的攀爬机器人。机器人结构体系采用双层并联复合轮腿,侧向吸附力采用环向抱紧式,相比夹持式、真空吸附式、永磁吸附、变磁吸附、侧向顶紧式等,绳索通过双向张拉抱紧电机驱动复合轮腿抱紧墩柱,实用性强,结构系统简介,承载能力强,重量轻,能耗小,可适应变截面;控制系统可靠、运行平稳、可姿态矫正,稳定性高;造价较低、并可形成作业平台。
图3 转体姿态解析流程
3.3.1 研发思路
通过模块化分解,分系统研制及试验,制定了科学合理、可靠的技术方案。攀爬机器人系统由机械系统、驱动系统、控制系统和感知系统四大部分组成。
3.3.2 系统实现及创新
机械系统采用双层并联伺服顶升架构,即上下两段。下段抱紧,上段松开,上下段之间的伺服推杆顶升上段爬行至给定距离;上段抱紧,下段松开,伺服电机拉动下段爬升,依次往复。其中每段安装一组基于环向张拉索驱动的伸缩复合轮腿,复合轮腿中包括由内外套筒组成攀爬机器人可伸缩支撑脚、攀爬机器人可伸缩爬行轮,可伸缩支撑脚、可伸缩爬行轮沿截面周圈布置,并与机器人本体相连;环向张拉索通过带U形滚动轴承串联连接支撑脚,索的张拉,推动支撑脚抱紧墩身,并与爬行轮联合形成自平衡体系,复合轮腿可沿墩身法向方向伸缩,索张拉后,各复合轮腿通过压拉复位弹簧形成受力均衡的弹性支点,用于为机器人提供支撑及行进用的摩擦力,进而实现机器人定位及抱紧松开的交替。
实现了如下技术创新,可以根据墩身截面自适应重构的机械系统;开发了多通道同步抱紧系统,实现了抱紧系统多支撑点的同步伸缩、定位及触力自主调节;提出了基于积分滑模的欠驱动墩身形状跟踪控制方法,该方法可以有效地完成轨迹跟踪任务,并且对参数摄动具有很强的鲁棒性;提出了基于多传感器的信息融合技术,实现了感知、规划、动作和协同的智能化;开发了具有现场管理特征的操作系统,使用过程中体现“维护管理数据化、数据可视化、管理动态化、服务人性化、检测实时化”。
4 结 语
本文主要基于模块化视角,通过对智能建造的内涵、铁路企业技术创新现状的描述,以创新链与产业链融合匹配为原则,以产业链关键环节为突破点,构建了企业的技术创新路径:功能模块重点突破路径及架构规则重建路径,并给出不同路径间的适用条件。同时,结合某特大桥的施工开展了智能建造创新实践,实现了施工工艺过程、关键业务流程的智能监测、智能分析、智能控制,提升了企业施工技术水平及核心竞争力,为铁路施工企业智能建造研究及实践提供参考。
智能建造背景下,铁路施工企业要把握市场变化、创新思维,认真研究行业智能建造政策、需求,聚焦互联网、大数据和智能机器人应用领域,开展集成创新,构建主要业务板块的智能建造体系,实现产业转型升级,推动企业高质量发展。
参考文献
[1] 王峰.我国高速铁路智能建造技术发展实践与展望[J].中国铁路,2019(4):1-8.
[2] 徐志刚,李金龙,等.智能公路发展现状与关键技术[J].中国公路学报,2019(8):1-24.
[3] 王同军.基于BIM技术的铁路工程建设管理创新与实践[J].铁道学报,2019(1):1-9.
[4] 王狄龙.新型建筑工业化与BIM技术的协同关系分析[J].中国建材科技,2018(6):73-74.
[5] 赵康杰,刘育波.产业链与创新链互动促进资源型区域产业转型研究[J].煤炭经济研究,2019(12):4-11.
[6] 郭树东.以企业为主体的铁路技术创新体系构建研究[J].科学决策,2015(4):52-68.
[7] 黄端.建筑工业化的发展现状与对策[J].中国标准化,2018(18):45-46.
[8] 张贵林,中国建筑业发展路径暨施工企业转型升级研究[J].建筑,2014(3):9-19.
[9] 武建龙,王宏起.战略性新兴产业突破性技术创新路径研究——基于模块化视角[J].科学学研究,2014(4):508-517.
[10] Jacobides,M.G,Knudsen T.Benefiting from innovation:Value creation,value appropriation and the role of industry architectures[J].Research Policy,2006(3):1200-1221.
[11] 王凤起,彭书凝.建筑业施工技术发展分析[J].建筑技术,2018(6):665-669.
[12] 叶姝颖.施工企业技术管理模式的研究[D].沈阳:沈阳建筑大学,2018.
[13] 黄伟敏,李增平.服务器虚拟化技术在铁路施工企业的应用[J].科技管理研究,2010(16):206-207+205.