职称论文

摘要:机械自动化是各行各业发展的主要趋势, 随着社会对工业生产效率的要求越来越高, 传统的人力劳动和半自动化劳动已经不能满足现代生产加工的需要, 通过自动机械手臂代替人工完成重复的体力劳动, 不仅减轻了人工负担, 更提高了工作效率和质量。针对机械手臂应用的特点, 说明了其常见的种类和各自优势, 分析了气动机械手臂的关键技术原理, 总结了气动手臂控制的流程及方式。
关键词:气动; 机械手臂; 技术; 控制;
Abstract:The main trend of the development of mechanical automation in all walks of life is that with the increasing demand for industrial production efficiency in society, the traditional manual and semi-automatic labor can no longer meet the needs of modern production and processing. Replacing manual labor with automatic manipulator arm not only reduces the manual burden, but also improves the efficiency and quality of work. According to the characteristics of the application of the manipulator, the common types and their respective advantages are explained. The key technology principle of the start-up manipulator is analyzed, and the control principle and mode of the start-up pneumatic manipulator are summarized.
Keyword:pneumatic; mechanical arm; technology; control;

在机械技术不断进步的背景下, 工业生产对自动化的要求越来越高, 机械手臂作为现代工业上广泛使用的先进设备, 在自动生产线、机械加工、汽车装配、智能装备、建筑领域、采矿业等众多领域有广泛的应用。常用的机械手臂主要用来实现抓取和移动工件的相关功能, 机械手臂尽管在大多数工作场合均执行简单的重复性工作任务, 但其在保证工作稳定性的同时, 还能代替人力工作于高温、噪音、粉尘、有毒、辐射、危险等恶劣环境, 显著提高了工业生产的安全性和效率。且传统的人工搬运设备存在着生产效率低、准确性和安全性不足的问题, 这也推动了现代化新型机械手臂的研究与发展, 作为智能辅助设备, 机械手臂也以其特有的优势创造了非常广阔的应用和发展前景。
1 机械手臂的种类及特性
机械手臂根据不同生产要求和技术特点分为不同的种类, 按照现阶段使用的结构和功能, 大体可以分为普通机械手臂、液压机械手臂、气动机械手臂以及其他功能更为综合的先进机械手臂。普通机械手臂通常采用机械结构和电机、关节轴承等部件组成, 属于传统的机械手臂形式, 在过去的机械化生产中使用广泛;液压机械手臂在普通机械手臂的基础上增加了液压系统及相关原件, 优化了机械手臂的相关性能;气动机械手臂也是在传统的机械臂上进行的优化, 增加了气泵、气缸及其他气动元件。
表1列举了工业生产上常用的不同种类机械手臂的特点。从表中可以看出, 普通机械手臂的优势已不明显, 液压机械手臂和气动机械手臂根据不同的使用要求, 具备各自的优势和特点, 液压机械手臂具有传递功率大的特点, 而气动手臂的可控性和灵活性更好。
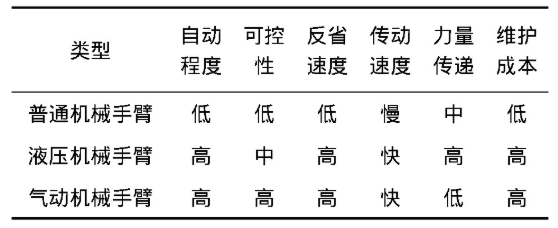
表1 不同种类机械手臂特点
2 气动机械手臂的主要结构
2.1 总体结构及特点
采用气压回路控制的机械化手臂在自动生产领域应用十分广泛, 根据不同的要求, 机械手臂的结构和形式也多种多样, 其关键的部件包括了控制装置、驱动电机、气泵、气缸、支臂、连接臂、抓手以及固定结构等 (图1) .
本文以图1所示的机械手臂为例, 说明气动机械手臂的结构功能及控制方法。气动机械手臂通常需要按照固定的动作顺序完成气缸的运转设计, 例如图1中的机械臂, 能够完成抓取物体、支臂伸缩、连接臂升降、立柱转动四个功能, 整个过程可通过PLC控制和调整, 且通过控制手柄能实现复位、停止、手动操作等众多功能。
2.2 关键部件及功能特点
为方便对关键部件进行说明, 现将图1中的气动机械手臂简化为图2所示。立柱的主要功能是实现机械臂整体在B处的上下移动, 同时能够为支臂在A点提供支点, 以保证支臂的上下摆动, 从而完成机械臂的后续工作。总体上讲, 立柱必须具备足够的力学强度, 以保证整个机械手臂工作过程的安全性。支臂在A点通过转动副与立柱连接, 能够实现支臂在竖直方向的摆动要求;连接臂与支臂在C点通过旋转缸连接, 以实现连接臂在水平方向的转动要求。连接臂与抓手在G点处采用气缸直连, 能够实现抓手在竖直方向的精细移动。在设计各部件结构和尺寸时, 必须要考虑实际工作的各种情况, 保证机械手臂能到达工作面的任意位置。
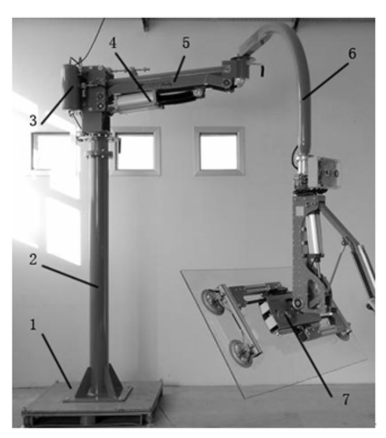
图1 气动机械手臂主要结构示意
1.固定底座2.立柱3.驱动电机4.气缸5.支臂6.连接臂7.抓手
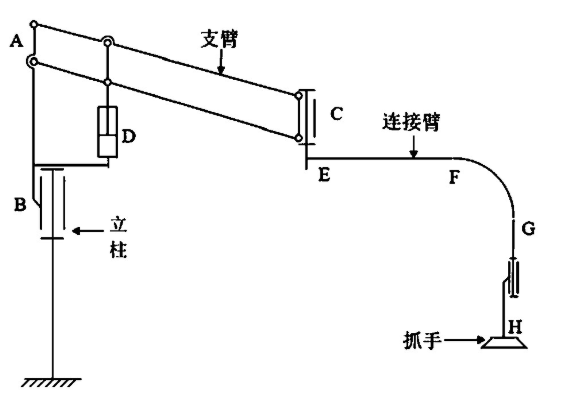
图2 气动机械手臂结构简化
从图1可以看出, 立柱的结构包括了上下两个法兰的连接结构, 下部法兰的几何尺寸较大, 能够与地面基础通过地脚螺栓实现有效的连接。而与上部结构的连接使用了圆锥滚子轴承作支撑, 保证了立柱上半部分能够绕立柱中心线自由转动, 并且在关节处设计有制动结构, 若发现机械臂出现故障问题或危险, 可通过控制制动器实现旋转结构的锁定。立柱的上部通过心轴与支臂相连接, 支臂利用汽缸伸缩实现相关动作, 在支臂与立柱的连接处, 也设计了安全防护的制动装置, 以避免支臂失效突然下垂而产生的安全隐患。
3 气动控制原理及工作流程
气压传动的机械手臂是工业上应用较多, 通过将空气压缩后产生的能量转换为动能, 从而完成气缸等执行元件的运动, 带动机械臂各部件完成相关动作。机械臂使用的启动装置大体由动力机构、辅助机构、控制机构和执行机构组成, 如图3所示。动力机构主要是用气泵压缩空气为系统提供压缩力的结构, 辅助机构主要是对气源进行过滤、传导等辅助功能, 控制结构通过控制阀改变压缩空气的压力、流动方向以及流量, 执行元件通过气缸、旋转缸完成指定动作。
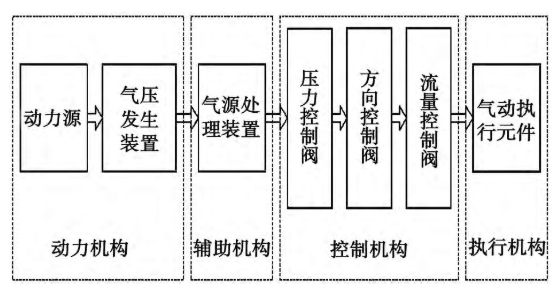
图3 气压传动系统流程
将气动装置应用于气动机械手臂时, 需要为手臂设计合理的工作流程, 以图1所示的机械臂为例, 工作流程可设计为:工作开始---立柱气缸回缩下降---旋转缸绕立柱转动---支臂气缸回缩摆动---连接臂气缸伸出---抓手抓取物品---连接臂气缸回缩上升---支臂气缸伸出抬高---旋转缸绕立柱回转---立柱气缸回缩下降---抓手放置物品---工作结束。机械手臂的动作流程, 可通过执行单元里面的行程开关以及压力继电器进行目标点检测, 然后通过PLC发出控制信号对相应的电磁转向阀进行控制, 以保证机械手臂能按照预定路线动作。
4 结束语
综上所述, 气动机械手臂在结构和功能执行上具备其特有的优势, 较适合需要灵活反应和便捷操作的场合使用。由于不同工作场合对气动机械手臂的要求不相同, 因此, 在设计和使用气动手臂时应注意对其气源和传导零件的保护, 以避免漏气或装置失效产生安全隐患。尽管气动机械手臂具有效高的使用价值, 但是随着工业自动化技术的不断进步, 为克服机械手臂作业的短板, 先进机械手臂的研究逐渐向着多功能和多学科结合的方向进步。
参考文献
[1]叶金玲, 周钦河, 赖乙宗。自动化生产线机械手全气动控制系统设计[J].制造技术与机床, 2014 (4) :79-82.
[2] 杨波, 沈燕青, 朱林军。气动机械手在自动化冲压生产线设计中的应用[J].科学与财富, 2017 (1) .
[3]师亚娟, 刘欣。基于PLC的自动化生产线三自由度机械手控制系统设计[J].工业控制计算机, 2013, 26 (6) .
[4] 李鹏帅。气动助力机械臂结构设计与控制系统研究[D].天津:天津大学, 2015.
[5]应帅。基于PLC的机械手臂控制系统设计的研究[J].科技创新导报, 2017 (36) .

本篇文章首先就测控技术的发展与应用进行简单分析,了解测控技术发展中计算机网络技术的促进作用,并且就具体应用技术进行研究,希望为以后的发展提供借鉴。...

氢既是重要的工业原料,也是高效清洁的二次能源,具有燃烧热值高、燃烧产物无污染等特点。在能源转型过程中,更重要的是氢作为一种清洁能源和良好的能源载体,具有清洁、可储能、可运输、应用场景丰富等特点。...

电力技术不仅可以保障电力调度的稳定运行,还可以保证电力资源满足人们的电力需求。本文将深入探析电力调度中应用到的一些电力技术。...

虽然单片机中已经普遍地应用了电子工程技术,并且能够极大地促进单片机的进一步发展,但是,还存在着一定的问题,只有深入开展这些问题的研究分析,才能够找到关键的原因采取针对性的措施。...
文章首先对BIM技术在暖通空调设计中的作用进行了阐述,然后分析目前BIM技术应用于暖通空调设计的基本情况和应用特点,...

本文论述我国机械工程自动化的现状和发展前景,并且提出优化方案,以此希望可以促进我国在相关领域的发展。...

对白酒计算机品评技术在白酒品评中的重要性、计算机在白酒品评过程的功能、计算机品评技术在白酒品评过程的应用创新进行了详述。...

本文通过锻工生产环节安全防护,全面化的车工、镗工防护,铣工操作安全防护,刨工、插工操作部分安全防护策略,分析机械加工工艺操作要点。因此,文章研究结果,为机械生产资源科学性调节提供新思路。...

本文首先分析了PLC技术的工作原理、特点及应用优势,然后探究了PLC技术在电气工程自动化控制中的具体应用,以期提高电气自动化控制水平。...

船舶制造行业在经济发展过程中发挥着巨大的作用,然而因为其耗费大量的资源,对人类赖以生存的自然环境产生较大的威胁。如果将节能减排的绿色制造理念运用于船舶制造行业中,不仅能够减少对能源资源的消耗,同时还可大幅度减少船舶建造的成本。...