��������˶ʿ����

������4�� �綯�������վ������������
����
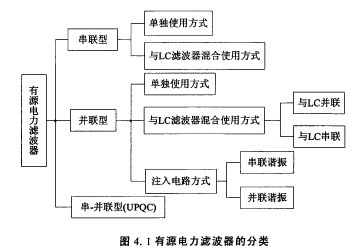
����4.1 �����������������ķ���
����Ŀǰ,�綯�������վ������������������Ҫ���ܶ����������������ͱ�����������[34]�����ܶ�����������˵,��Ҫ������ܵ�г��Ӱ����豸��ϵͳ�Ŀ�г��������������Ҫ��ʩ��:(1)ѡ������Ĺ��緽ʽ,���綯�������վ�ɽϴ������Ĺ������ɸ�һ���ĵ�ѹ�ĵ�������,���Լ�Сг����ϵͳ�������õ��豸��Ӱ�졣(2)��ߵ綯����������г����������,�Ľ������豸����ʹ����г������������������������������������˵,��Ȼ�綯�������վ��������ʱ�����������������,�����ʵ��������Ҳ�ܹ����Ƶ���������������ָ�綯�����Կɿظ��ɵ���ʽ�����������,����Ϊ��Ч��ܵ綯�������ģ���Ե�����ɸ���Ӱ�����Ҫ�ֶ��ܵ��˹㷺��ע[35]������[36]���о��������,������ɸ��Ƶ����Ľڵ��ѹˮƽ,������������ġ�����[37]���������������ͳ����õ�Լ��,�Ż��綯�������ģ��������µij�繦��,ʹ֮������ȵ��������������,����������еľ����ԡ�����[38]������ͳ��ɱ���СΪĿ��,��������������ѡ�����ȳ��ĵ綯����,����˵綯����ʵʱ��������Ʋ���,�ò��Կ���Ч���������������,������������Ľڵ��ѹ���Ρ�
��������,�綯������Ϊ�ֲ�ʽ�Ĵ���װ��,����ͨ��Э���������ŵ����,ʹ֮��ϵͳ���ɸ߷�ʱ�ŵ�,��ʱ���,ʵ��ϵͳ��������ȡ�����[39]����ط����˵綯������Ϊϵͳ�����Դ�ľ���Ч�档�ӱ���������˵,��Ҫ����Ӹ��ֵ�����������װ��(��Դ�����˲���,��Դ�����˲���,�������Դ�˲���,��ֹ��������,��ֹ��������,��̬��ѹ�ָ���)�����Ƶ���������������Ҫ�ӱ��������������������綯�������վ�ĵ����������⡣
����4.2 г�����ƺ���������������
����Ŀǰ��ͳ���ܹ�����г�����ƺ����������豸��Ҫ����Դ�˲���(PPF)����Դ�����˲���(APF)���������Դ�˲���(HAPF)����ֹ��������(SVC)����ֹ��������(SVG)����̬��ѹ�ָ���(DVR)�ȼ��֡����潫�������������ŵ��ȱ����з�����
����ĿǰӦ����Ϊ�㷺��г��������ʩ�����PPF,�����õ�С�����Ԫ����г������,���迹������·���γɵ��迹֧·,�Ӷ�ʹ���������г��������͡���ȻPPF�ɱ���,������ԱȽϳ���,�����Բ���������,���������²���(1)г������Ƶ��խ��ֻ�ܽ��ض��ļ���г������,����ijЩ��г��������Ŵ����á�(2)��������С���˲��������渺��г�����������������,������г����������ʱ,���������˲�������,����˲�����,�������¹ʡ�(3)��Ӧ�Բϵͳ��������˲����Բ����ϴ�Ӱ��,�˲�Ч�����ܵ�ϵͳ�迹��Ƶ�ʱ仯��Ӱ�졣(4)�ȶ��Բ����ϵͳƵ�ʺ��迹�ı仯,��������г��������ܻ���PPF������迹֮�䷢��,��ʱ,������������г��,������ʹг���Ŵ�,����˲�����ѹ����,������,ʹ�������ȶ����ܵ����ص�Ӱ�졣(5)Э���Բ��ʱ����Э���˲�������������ѹҪ��(6)װ�ñ���,�����,��Ч�������Ķࡣ
�������PPF��ȱ��,���ż����ķ�չ,����ѧ������� APF������г������PPF���APF���о������[41]:�����ܲ�������г��,������ͬʱ���������ʡ��������䡢�������ƽ���ѹ��;�˲����Բ���ϵͳ�迹��Ƶ�ʵ�Ӱ��,������������迹������������г���Σ��,�Ҷ����·��г�������������;��������Ӧ����,�ܶԱ仯��г������Ѹ�ٵĶ�̬���ٲ���;�����ڹ�������,������г�������ϴ�ʱ,���Ƶ�·��ʵ���������������ϵͳ�İ�ȫ�ԡ���ȻAPF���������ŵ�,����APF����С����۸ߡ����ʺ�Ӧ�����и�ѹ����,�����������Ӧ���뷢չ��
������ǰ��Ҫ�������������豸��ͬ���������SVC��SVG��DVR������ͬ���������������е�ͬ���綯������,������й�����,ֻ���������ʵ�����������ŵ��Dz���������,�������������ij���;ȱ��������ά���鷳,����������ٵ��ڵ�Ҫ��,���Ŀǰ��������̭142]����ֹ�������������ŵ������Ӽ�������������Ѹ�ٷ�չ�㷺Ӧ�ö����ֵ�һ���ܶ�̬ƽ����������1���ֹܿ��Ƶ翹��(TCR)�;��ֹ�Ͷ�е�����(TSC)��һ�ֻ�����ɲ�����������,�Ϳ����в�ͬ��SVC��ʽ�����ص���:�߱������������������������Լ۱ȸ�,�ܹ���Ч�����ѹ���������������,�����������л������ע��г��[43]������SVC����������ȱ��,������SVG��չ��������ֹ���������ֳƾ�ֹͬ����������ֹ�������SVG��ԭ����APF����,�������������ļ��ڼ���ϵͳ����Ҫ��������,Ȼ��ͨ�������Ŀ���ϵͳ���и��ٿ���,��������Ӧ����������SVG�ص�����Ӧ�ٶȿ�,ռ�����С����Ӧ����ǿ,û������,����ά�����㡢г�������١��߱���ǿ�Ķ�ʱ������������ϵͳ��ѹˮƽ�ϵ�ʱ��Ҳ��ע��ϴ��������,��һ���Ƚ���ʵ�õ�������װ��[44]��������ɱ��ϸ�,�谭���䷢չ��(DVR)�ǽ��������ֵ�D-FACTSװ��,һ�������ڵ�Դ�븺��֮�䡣���ص�����Ӧ�ٶȿ�,���Ա�֤���ɲ��ѹ����Ϊ������,������ѹг���͵�ѹ����������Ը��ص�Ӱ�졣����������С,һ�������ֻӦ���ڵ�ѹ�������
����4.3 ��Դ�����˲����ķ���
����ͨ������������֪,����APF���ж��ŵ�,�ѳ�ΪĿǰ�о���һ���ȵ�,�ڲ��õĽ���һ����㷺��Ӧ�á���˱��IJ���APF����������������APF����ͬ�ķ������Է�Ϊ��������ͼ4.1,���潫�Ը���APF—һ���н��ܡ���1��
����
���������APF����·PWM����������Ϳɷ�Ϊ��ѹ��(ֱ���ഢ������Ϊ����)�͵�����(ֱ���ഢ������Ϊ���)����[45]��������APFֱ�������ڹ��������л�һֱ��������,�˵�������������������ϴ����,������ѹ���Ӵ�,�����ڴ��ʳ�����Ӧ�á����,ĿǰͶ��ʵ��Ӧ�õĽ��١���ѹ��APF��ֱ�����ѹ�ڹ��������л�������,�������������PWM��ѹ��,�ŵ���Ч�ʸߡ���ĵ�,������Գ��졣Ŀǰ�õ�Ӧ�ô�APF���ǵ�ѹ�͡�
���������APF�����˽ṹ�ɷ�Ϊ�����͡������ͺʹ�-�������������[46]�����д������ֿ��Է�Ϊ����ʹ���ͺ���LC�˲������ʹ�������ࡣ������APF���ص���:������APFͨ��������ʽ�������,ͨ�����һ����г����ѹ�෴�IJ�����ѹ������г����ɵIJ���Ӱ�졣ͬʱҲ�ܶԵ�ѹ������ѹ������е��ں����ơ�
����������APF��Ĵ�,������·����,��������Ӧ�á������Ϳɷ�Ϊ����ʹ���͡���LC�˲������ʹ���ͺ�ע���·�����ࡣ����LC�˲������ʹ�����ֿ�ϸ��Ϊ��LC�����ͺ���LC����������,ע���·�Ϳ�ϸ��Ϊ��LC����г�����LC������г�����ࡣ����ʹ���Ͳ���APF���ص���:������APFͨ��������ʽ�������,�����һ������Դ,ͨ�����һ����г�������෴�IJ�������������г��������ɵIJ���Ӱ��,������·�Ƚϼ���Ҫ�����������������Ҫ����֮����
������LC�˲������ʹ���͵��ص���:����������APF��PPF�����ֲ���������,��APF�����IJ���������Ҫ���������ϸߵ�г��,��PPF�����IJ���������Ҫ���������ϵ͵�г�����뵥��ʹ���Ͳ���APF���,��APF������,�˷��������ĸ�Ҫ���ǹ���������PPF������迹����ܷ���г��,��ʵ��Ӧ���б�������������,�������Ϳ���ʹ���Ƶ�·��ø��ӡ�ע���·ʽ���ص���:����PPF���ѹ�Ļ���Ƶ�ʲ�����г��,ʹPPF֧·�����˾��ֻ�����ѹ,APFֻ���ܺ�Сһ���ֵĻ�����ѹ,�Ӷ���һ��������APF������,ʹAPF��Ӧ�÷�Χ�����չ,ͬʱ,������PPF������迹����ܷ�����г����δ����չ��һ������
������-���������APF (�ֳ�ͳһ��������������)���ص���:����һ��ֱ�������ͬʱ���ƴ�����APF�Ͳ�����APF,ʹ����ͬʱ��г�������͵�ѹ���в���������Ϊ��Ŀǰ�������ϵͳ������������Ч�ķ�������������ͬʱ�Դ�����APF�Ͳ�����APF���п���,�������Ƶ�·�Ƚϸ���,������ɱ���Ӹ߲��¡�Ŀǰ���������о�������,ʵ��Ӧ�ý��١�
��������APF��Դ�����ɷ�Ϊ�е����ԴAPF�������ԴAPF,�������ԴAPF�ֿɷ�Ϊ����������APF������������APF����[47]��
����ͨ������������APF�ص�ķ���,����Ϊ�ڱ����е綯�������վ�����������Դ��������������������Ƶ�ѹ��ע��ʽ�������Դ�����˲�����
�������ż����IJ��Ͻ���,��������APFװ�ñ����Ƴ���������[48]���һ�����Ͷ��ƽAPF,��Ȼ����� APF������,�����ƹ��̱Ƚϸ���,�ɿ���Ҫ��ܸߡ�
��������[49]���һ�ִ�����������Դ�����˲���,��Ȼ,���������,�����ڴ��ʳ���,���dzɱ���,���Ƹ��ӡ�����[50]����һ��HAPF������г��,��Ȼ���˲������PPF��APF���ŵ㡢����Ч���Ϻ�,Ҳ���Բ�����������PPF����û����Ե綯�������վг�����ص����ר�ŵ����,��г�������������в����˴�ͳ���㷨,��������⾫�ȵ͡�ʵʱ�Բ�,�������˴�ͳ�������������PWM����,��������,���ƾ��ȵ͡��������ȱ��,���������һ��ע��ʽHAPF,�ڿ��ƹ����в����˸Ľ���d-q�㷨�Ľ����������,��С�˼�����,�����г����������ٶȡ����Ⱥ�PWM���ƾ��ȡ�
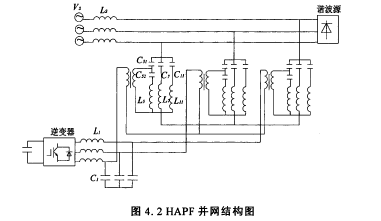
����4.4 �������Դ�����˲����Ļ����ṹ
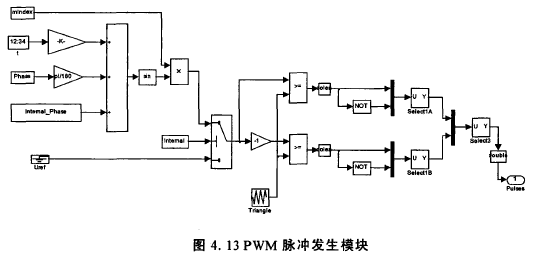
����HAPF�IJ����ṹͼ��ͼ4.2,��ͼ4.2������֪HAPF����APF��PPF������϶���,�ɵ��ݽ���������,APF��PPF��ͬ����г����PPF�����ɶ������г�˲�������,�ڿ��ǵ��綯�������վг�����ص�ǰ����,��PPF֧·������� 5�Ρ�7�Ρ�11���˲�֧·��APF�����˳������IJ���г������ֹ�����迹��PPF֮���г������˲�������LC��ͨ�˲���,�����˳���ѹ��������������������ĸ�Ƶë�̡���ѹ��һ�������ʵ��APF��PPF���ֵĵ�������,��һ������Ը���APF��PPF�ĵ�����ѹ�ȼ���ѡ���ʵ��ı�ѹ�����,������APF��PPF�ĵ�����ѹƥ�䡣���ڵ��15�͵���C52�Ի���г�������,ʹ��������ȫ������PPF����,APF�����ܻ�����ѹ����������,�Ӷ������� APF������,��������Դг������ϵͳ��Ͷ��,�����ϵͳ���Լ۱�,�ﵽAPFʵ�û�����������������Ŀ�ġ���2��
����
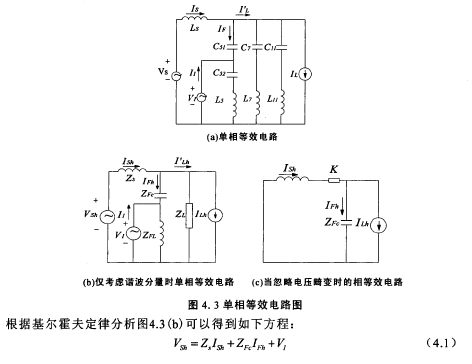
����4.5 �������Դ�����˲����Ĺ���ԭ��
����ͼ4.2�е�HAPF�ĵ����Ч��·��ͼ4.3(a)���������APF��һ���ܿص�ѹԴFi,г��Դ�綯�������վ��һ������Դ/l��ͼ��,C51��C52��Ls��Ci��Li . Cn .Ln�ֱ�Ϊ��Դ�˲���5��7��11���˲�֧·�ϵĵ��ݺ͵�С�ͼ3.3 (b)Ϊ�����ǵ���г����������ʱ�ĵ�Ч��·ͼ,ZsΪ�����迹��ZpeΪ����C51���迹��ZflΪC52��is�Ĵ����迹��ZLΪ7�κ�11���˲�֧·��Ч�迹����3-4��

����
������ʽ(4.6)�ɵ�,��hh��Ϊ��ֵ,K����,/%����С����/:ֵ�ӽ��������ʱ,��������ĸ���г��������PPF,��ȡ�úܺõ��˲�Ч������������ϵͳ��ѹ���������г������ʱ,����Fsa=0ʱ,��ʽ(4.7)�ɵ�,����/s;;����,ͼ4.3 (a)��ͼ4.3 (C)�ǵ�Ч�ġ���ͼ4.3 (c)�ɵ�,���൱��һ��������ߴ����ڵ���֧·��,��ʱ,PPF֧·�ϱ�Ȼ��������г����������/:>:>|Zi:c|,LC�˲����������ɸ��ز�����г����������/:>��|zy,��������˲����ԡ�ͬʱ,K���ܹ��ﵽ����Z's��Zpe��������г���Ч����
����4.6 �������Դ�����˲�������ϵͳ�Ľṹ
����HAPF�Ŀ��Ʋ�������������������,������1ʵ�ֵ��������IJ�����г�����������ļ�⡢�����������źż���ȹ���,������2�����PWM�Ŀ���,������PWM�����ź���ʵ�ֶ�������Ŀ���,������“������1”��“������2”�����ͼ4.4��ʾ����Դ�����˲����Ŀ��ƹ��̡���5��

����
���������ø���A/D���������������/s���뵽������,Ȼ�����г�����������ļ�⡣��г�����������������в�����һ�����ͻ���d-q����任�ķ���,����г������������,��ͨ��PI�������Ϳ��Եõ�APF���������ѹ��ָ���ź�R=KIsh��ֻҪ���ø�����PWM�������������,����t/c��Ϊ�����ź�,�Ϳ���ʹ��������%,�õ���Ҫ�ĵ�ѹ���Ρ����IJ����˸Ľ����������[52]������PWM�����ź�,�ʹ�ͳ������ȵ��ƾ��ȴ����ߡ�����,�͵õ��� PWM�����źŵ��������ݡ�Ȼ��,��PWM�������ݷ���������2,�ɿ�����2����PWM�����ź�,ʵ�ֶ�������Ŀ��ơ�
����
����4.7 ��ͳг��������ⷽ������
����Ϊ�˸��õĽ���г�����ƺ�������,��г�����������������б��뾫ȷ�ļ���г������������ĿǰӦ�õ�г��������ⷽ����Ҫ�л���Ƶ������ĸ���Ҷ�任(FFT)��ⷨ����������˲ʱ�����ʵ�г����ⷽ��������Ӧг����ⷽ��������Fryze���ʶ���ļ�ⷽ��������ģ���ͨ������˲����ļ�ⷨ�����潫����Щ�㷨���ص���з�����
����(1)����ģ���ͨ������˲����ļ�ⷨ[53]:�÷���������Ӧ����г���������ķ���,Ϊ�˵õ�г����������,����50Hz�Ĵ�ͨ������˲��������ص����е�50Hz��������������������ּ�ⷽ�����ŵ����ڵ�·�ṹ����۵͡����������dz����㡣����,�÷���Ҳ��������ȱ��:�˲������������ƻ�����������źŻ���,���²���Ч������;Ԫ���������˲���������Ƶ��Ӱ��ܴ�,�õ��ķ�Ƶ����Ƶ���Բ�����;��⾫�Ȼ��ܵ���Ƶ�ʲ�����Ӱ��,������г�������к��еĻ�����������,����APF�IJ�����������;���ܷ�������й��������������ڴ�������ȱ��,�÷���ĿǰӦ�ü������ࡣ
����(2)����Fryze���ʶ���ļ�ⷽ��[54]:�÷����ǽ����ص����ֽ�Ϊ�������ѹ����һ�µ��й��������������������������������������÷�����ȱ���DZ��뽫���ص��й����ʺ͵�����ѹ����Чֵ�������,�����ڳ���һ����Ƶ���ڵ�ʱ���ӳ�,���Ը���Ƶ���仯�ij��ϲ��˲��ø÷���������,�÷������ܴ��ܵĵ����н�г�������ͻ�����������������,�÷�����Ӧ������Ҫ�ֱ�г�������ͻ����������ij��ϡ�
����(3)����Ƶ������ĸ���Ҷ�任(FFT)��ⷨĿǰ,����г�������������ʱ����FFT�ķ����DZȽ��ձ�ķ����������и���г����������ͨ���Բ��������źŽ���FFT�������õ�����FFT�������г�����������ʱҲ���������źŴ���(DSP)оƬ�����ٶȵ���߶�Խ��ԽС,ʵʱ�Եõ��˺ܴ���ߡ�����,�÷�������FFT�����Ļ����Ͻ���������,����źŲ�����������,������ϴ�������,�÷����������Ƚϴ�,��Ҫ����FFT�任�����任����ͬ�������������ŵ�����ѹ�������Ƶ���㶯�����������,�����Ƶ��й©ЧӦ��դ��ЧӦ,���ܴﵽҪ��ļ�⾫�ȡ�
����������,�ԸĽ���FFTг����ⷽ���о�Խ��Խ��,��Ҫ����:ͨ���Ӵ��㷨����FFT;�����������Ƶ�ʷ�;˫�����������㷨�������������ָĽ�����,���кܶ������Ľ��ķ���,����Ӧ�õIJ��㷺,��˲�����ϸ���ܡ�
����(4)����Ӧг����ⷽ��[56]���÷��������źŴ����е�����Ӧ��������ԭ��,��������ѹ��Ϊ�ο�����,���ص�����Ϊԭʼ����,�����ص������������ѹ������ͬ���й�������������,�Ӷ��õ�����г����������֮�͡���������ԭ�����ɵ�ϵͳ��һ���ջ��������ڵļ��ϵͳ,�������������Լ�����Ԫ��������,����������������;���ϵͳ�ڵ�����ѹ�������λ����Լ�Ƶ�ʲ����������������������,����Ӧ��������,�ܶԼ���źŽ��нϺõظ��ٲ��Ҿ��Ƚϸ�,���䶯̬��Ӧ�ٶȱȽ���,��������Ӧ�á�
����(5)˲ʱ�����ʼ�ⷽ�����ַ�������������ϵͳ,������ȡһЩ��ʩ(���ڵ����źŵĻ�����,��������ԳƵ��ص�,����������ź�)��,Ҳ���������ڵ���ϵͳ,�÷���ͨ�����㸺�ص�˲ʱ����,������ֱ����������������,���һ�����ȵ���ʷ���ݷ������������,����������ƽ������ԭ��,���������Ҫ�IJο��źš��������ϸĽ�,��Ҫ����^/-9����;?-^���Լ�/0����������[58]��p-g���Լ�/p-/,�����ַ��������˶Ա��о�,�������:����Դ��ѹ�Գ����䡢���ص����Գ�ʱ,���ַ�������ȷ�ؼ������������й���������������г����������;����Դ��ѹ���ص���������Գ�ʱ,���㷽������ȷ�ؼ���г������,��p-q���㷽���ʹ������������ѹ������������Գ�ʱ,ֱ��Ӧ�÷�����p-q���㷽�������ڼ�����,����ʵ������������ȫ������������ͬ����ת����任�ķ����ڵ�����ѹ���Գơ����������¾�ȷ�ļ���г������,���ŵ��ǵ�������ѹ�Գ�������ʱ,�����������ļ���·�Ƚϼ�[59]��
����(6)�����㷨:��Ҫ��ָ�����Զ����������˹����ܼ�����չ�����ĸ����Ż��㷨��Ԥ���㷨������Ҳ���Լ���г���ͻ���������,��С���任���������編�ȡ���Ȼ��Щ�����㷨���㾫�Ƚϸߡ���Ӧ�ٶȽϿ�,��������ʵ�֡�
����ͨ������������г����������㷨�ķ������ǿ�֪:����˲ʱ�����ʵļ�ⷽ���ܵ�ԴƵ�ʱ仯��Ӱ����С,�ܸ��õ�Э����⾫�Ⱥ�ʵʱ��֮���ì��,��APF��Ӧ����㷺�������,��˱��IJ��û���˲ʱ�����ʵļ�ⷽ����
�������潫�����ַ������з�����
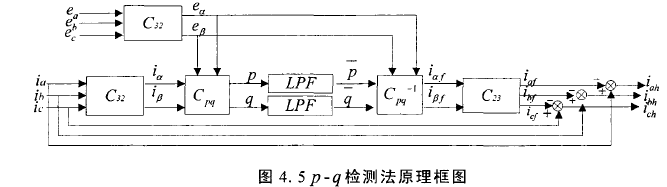
����4.7.1 p-q������
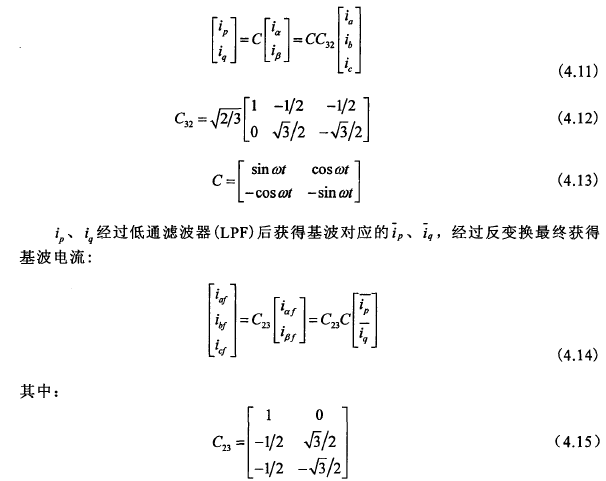
����p-g��ⷨ��ԭ����ͼ��ͼ4.5,����ϵͳ��������г��������������ѹΪ���������ѹ������������õ��㷨,���ݹ�ʽ���˲ʱ�й�����;7��������&����;7��gͨ����ͨ�˲���(LPF),�ɴ˿ɼ����˲ʱ�й����ʡ������ʵ�ֱ������7��q,ֱ������7��?���ɻ��������ѹ�ͻ�������������ò����ġ�����,��;^��?������ʽ�ķ��任�Ϳɼ������������/����ib��ح���Ļ����������V��V����6��
����
����������7��
����
�����÷�����ϵͳ�����ѹ�ԳƲ���г��ʱ,ͬ����Ѹ�١�ȷ�ؼ�����������е�г��������������,���ǵ�ϵͳ��ѹ���η�������ʱ,���ھ�����г��,����;&�����ǻ��������������ѹ�����õĽ��,���һ���������ͬ��г���ĵ����͵�ѹ�����õĽ��,��˼������/<��v> f��Ҳ������г��,�Ӷ�Ӱ��г�����ľ���,���Ҽ�����ľ������ŵ�ѹ���λ�������͡�����,��Ӳ����·ʵ����,/7-�ܷ�����Ҫ10���˷�����2��������,��������
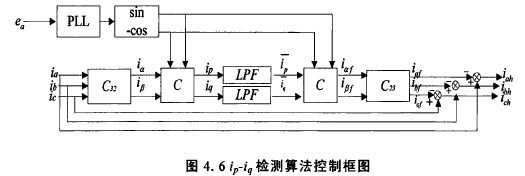
����4.7.2 ip-iq ����������ip-iq �㷨����г�����Ŀ��ƿ�ͼ��ͼ4.6����8��
����
�����Ƶ���������[6<^]:��������PLL����ڻ�������A���ѹͬƵͬ��λ�������ź�sine;?�Ͷ�Ӧ�������ź�cos?Aͨ����������a-b-c��ֹ����ϵ�任��d-q-0��ת����ϵ������:��9��
����
����г������ֵ��ͨ����г���ĵ��������������ֵ�õ���ʽ(4.16)��ʾ�������ʵ��г��������ͬʱ����,ֻ�轫���������Ͽ�����,��ֻ��⸺�ص���������ֻ��Խ��з��任���ɵõ�����ע�����в�������Ӧ���Ǿ�������֮��ļ���������10��

����
���������㷨��Ҫ��ȡ������ѹ����λ�źż���������ź�sine;/�������ź�003^??��������,�����ڵ�����ѹ��������ʱ,������������پ��Ȳ������Ӱ�쵽������ĽǶ���Ϣ,����Ӱ��г����ȡ�㷨�������������Ҵ����ľ�������Ҳ�������Ӧ����ʱ,����ϵͳ��Ӧ�ٶȡ���Ӳ����·ʵ����,ip-iqim��Ҫ8���˷�������Ӧ��ͬ���������������źŷ��������ü�ⷽ���ƶ��� APF��Ѹ�ٷ�չ,��APF�еõ��˹㷺��Ӧ�á�����,���ַ���ʹ���˺ܶ�ģ��˷���,�������ϴ�,��������,�Բ��������Դ�,���㾫�Ⱥ��ѱ�֤������,�÷���һ��ֻ����������ƽ���·ϵͳ����������ѹ�в��λ���ʱ,��⾫�Ƚϲ
����4.7.3 d-q�㷨����
����ͨ������������˲ʱ�����ʵ�г����ⷽ���ķ���,���IJ����� d-qmk����p-q���Լ������,����d-q�任��ⷽ�����ŵ����ڿ���������ѹг���Ͳ��ԳƵ�ѹ��Ӱ��,���ҽ�����������d-q�����б任����Ƶ�ʴ�,�õ�ͨ�˲�����ȡ�����źſ�������ģ���˲�������λ����,�Ҳ�����ɶ���ЩƵ�ʷ����������˥��,����������������������������С��ʵʱ�ԽϺá�
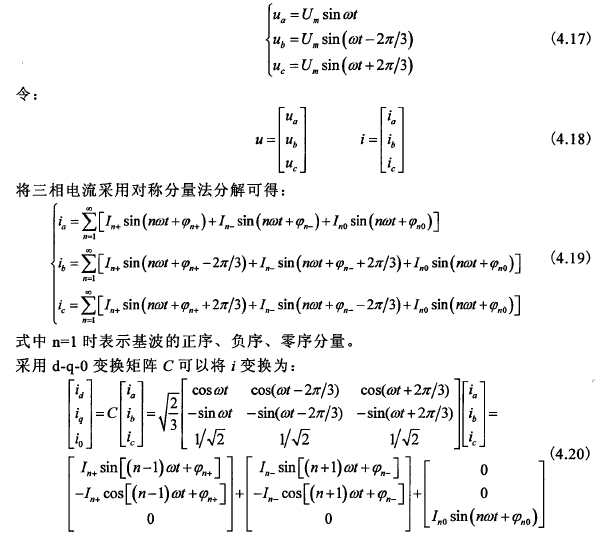
�����任����d-q-O����任(��������Park�任)�Ļ����ϼ�����,��ʵ����ͨ��Park�任��a-b-c����ϵ�������ѹ������ת����d-q-0����ϵ��,�Ӷ���������ȡ���������������[61]���������ѹΪ:��11��
����
��������ʽ�ɼ�a-b-c�����µĵ�������d-q-0�任��,��/7�ε�����������d-q-0����ϵ�µĵڴη���;�ڡ��εĸ���������d-q-0����ϵ�µĵڡ�+1�η������������������d-q-0����ϵ�¶�Ӧ����ֱ�����������ͨ��d-q-0�任�Ƚ���������任��d-q-0������,Ȼ���˳����е����ҷ���,�������Ӧ��ֱ������,�ٽ���ֱ����������Park���任�Ϳ��Ի�ԭ�õ�������������������
��������,ͨ��ʽ(4.20)��֪,��������еĻ������������Ϊ���9���ϵ�ֱ��������ֵΪ����������,�����ڻ�����������������������Dz������õġ����,���Խ�d-q-0�任��Ϊ�任������:��12��
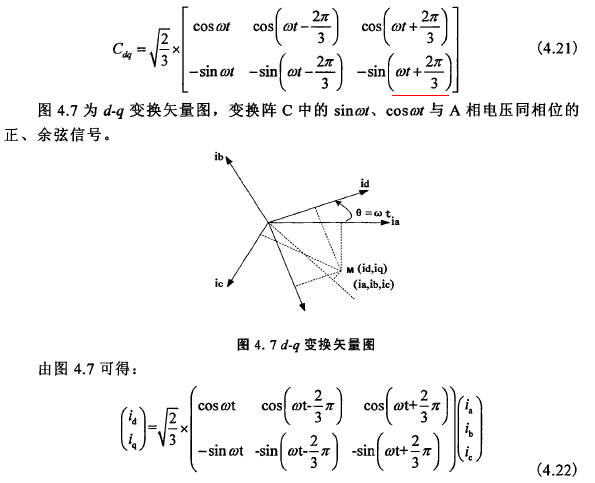
����
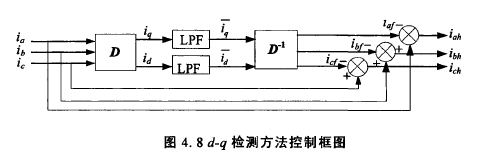
����ͼ4.8��ʾΪ����ϵ��ⷨ���ƿ�ͼ��������/?+/,+/��==0���������/?��h������3/2�任�õ�/?��ip������A�������ѹe,ͬ��λ�������ź�sin�źͶ�Ӧ�������ź�cos?/����ת�����㡣��13��
����
�������������������Park�任�õ���iq,�پ�����ͨ�˲���(LPF)�˲���/d����ֱ������5��1,���г��������ɻ����������(��i,��(������,����,�ɼ�ȥ��ֱ���������ɼ����ib���ĸ��������г���������÷�������û��ֱ��ʹ��ϵͳ��ѹ��Ϣ,ֻ�ǽ�ϵͳ��ѹͨ���������(PLL)�������źŷ������������Һ����Һ���,��ʵ������������������ĺϳ�ʸ��ͬ������ת����ϵ�µ�Park�任���ɼ��������ַ�ʽ��,�������ȷ�Ȳ���ϵͳ��ѹ�����Ӱ�졣ͬʱ���������㷨ʱг����ȡ���������������,������з��任,��˽����˼���������ʡ������ʱ�䡣���Ǵ˼�ⷽʽ����λ�ļ�⾫��Ҫ��ϸ�,���������Һ����ϳɵ�ʸ��Ӧ���������ѹ������������ĺϳ�ʸ��ͬ��λ��
��������λ�������,����������й����������ļ�⾫��Ҳ������ֵ���λ����������͡�Ϊ��������й�����������⾫��,���IJ�����һ�ָĽ���d-q�㷨��
����4.8 �Ľ���d-q�㷨����
����������ͳ�㷨��,���Եõ�������������������̡�����,ֻ�еõ�������ѹ���������֮�����λ��ϵ,���ܽ���������������������������������Ϊ��,����������øĽ��ͻ���^/-������任�ķ�������г�����������ļ�⡣�Ľ��ͷ���ԭ����ͼ��ͼ4.9����14��
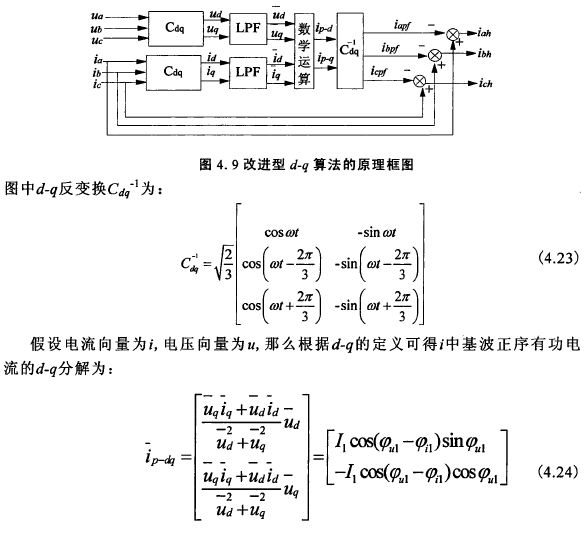
����
����ʽ(4.24)�б�ʾ���������й������ķֽ�����,^>,.1��ʾ����������������ij���λ,��ʾ���������ѹ�����ij���λ����ͼ4.6��֪,������������ѹ�ֱ�ͨ���任,Ȼ���ٽ�����ͨ�˲�������ֱ������,ͨ��ʽ(4.24)�Ϳ��Եó����������й�������^/���^�����,�پ���^/-^���任���ɵõ������еĻ��������й�����,���ܵĵ�����ȥ���������й��������ɵõ���Ҫ������г��������������������ͨ������^/-9�㷨�Ϳ���ʵ��г�����������ļ��,���Ҽ�⾫�ȴ����ߡ�ͨ��������֪,�Ľ���^/-���㷨���������ص�:
����(1)�ڸĽ���^/-���㷨���ڲ�֪�������͵�ѹ֮�����λ��������,ֻ��Ҫ�Ե������м������,���ɲ���г������;(2)�ڸĽ���^/-9�㷨��ֻ��Ҫ��ʽ(4.21)�еġ�/��Ϊ����/,���ɼ�⡶��г���������������;(3)�ڸĽ����㷨��ֻ��Ҫ��ʽ(4.21)�е�271/3��-2;t/3����,���ɼ�⡶��г���ĸ������������
������������������֪:����������ĸĽ��͵�������㷨�ܹ���г�������������н�Ϊ��ȷ�ļ��,�����ڼ��г������ʱֻ��Ҫ�Ե����źŽ�����������;ͬʱ�÷����������κ���ȫ����Ӧ���ڡ���г��������������ļ�⡣�ü���㷨������Դ�˲�װ�õ��о���Ӧ�þ���һ���IJο���ֵ��
�������,�������ϸĽ����㷨��ԭ����Matlab�������˸Ľ����㷨�ķ���ģ����ͼ4.10����15��
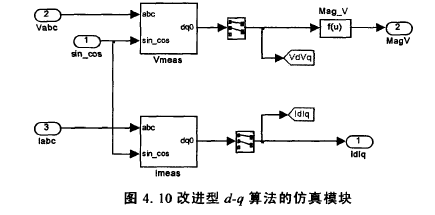
����
����4.9 ��ͳ�������������
����������г�������Ҫ����PWM���ơ�Ŀǰ,���Dz����Ʒ����ͻ��ȽϷ�Ϊ��õIJ���������PWM�����źŵķ�����ͨ��,Ϊ����������������ѹ�еĿ���ë��,��Ҫ�����������˼��ϵ�ͨ�˲�����������ͻ��ȽϷ����п���ʱ,���̶ܹ����������Ŀ���Ƶ��,������Ƶ�ͨ�˲���ʱ�Ƚ���������,���IJ������Dz����Ʒ������Dz����Ʒ�����Ȼ����������������ȼ��֡���Ȼ��������������,���������ַ���ʵ��,��ʵ�ʹ�����Ӧ�õIJ���[63]�����,���IJ����˹����������
������ͳ���������ԭ��ͼ��ͼ4.11,��1�����Dz���������,����ֱ���ز��ȵ�F�㴹����ʱ�����ཻ��?1��,���������Ϊ������,�ӳ���������Ʋ��ཻ�ڵ�A,��A������ʱ����ƽ�е�ֱ��,ֱ�������Dz��ཻ������,B���C��,����C������Dz���ֵ����ΪE��,��E������ʱ����ƽ�е�ֱ�߲���FA�ӳ��߽���D�㡣����ͼ�ο�֪AFCA?AFED,��Um/USΪ���Ʊ���M����ɵ�:��16-17��
����
����ͨ�������Դ�ͳ����������ķ������Եó�:��ͳ��������Ļ���˼·��ʹSPWM����ÿ��������������ز�������Ϊ���߶Գ�,�����ֻ֪��1�������������¾Ϳ�ȷ��2�������л���ʱ�̡�����,��ȱ���ǵ��ƾ��Ȳ�����Ȼ��������,����Ϊ�˽�һ����С������,��ߵ��ƾ���,���IJ�����һ���µĸĽ������������
����4.10 �Ľ��������������
�����Ľ����������ԭ��ͼ��ͼ4.12��ʾ�������Dz���������Ϊr,��?��/,+r����������ʱ�̵õ������ź�������j�͵�B,����J�͵�B��ֱ�ߺ����Dz��ཻ�ڵ�C�͵�D‘�ڵ�C�͵��)Ӧ��ʱ�̡�1��h�ֱ�Թ��ʿ���������ͨ�Ͻ��п��ơ����Dz��ķ�ֵ//������r��ÿ�����ڵ����ʱ�̡�,+����ȷ����,��Si�Ͷ�,Ϊ�����ź�J���5���ֵ,��ô�߶�AB�ķ���Ϊ:��18��
����
�������������������֪:�Ľ�����������ļ�������ƾ��ȸߡ���������ϵͳ�Ŀ��ƾ��ȡ�����,�͵õ��� PWM�����źŵ��������ݡ�Ȼ��,��PWM���������Դ���ͨ�ŵķ�ʽ����������,�ɿ���������PWM�����ź��������������
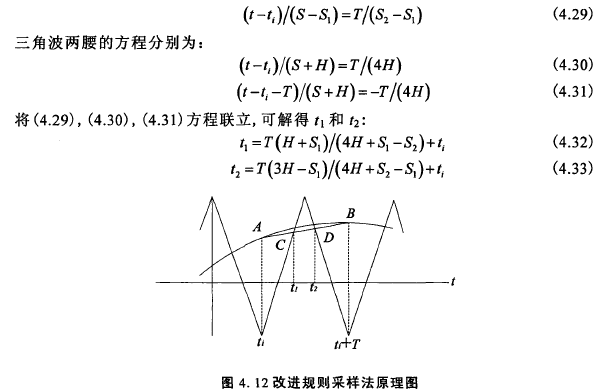
�������,�������ϸĽ��Ͳ�������ԭ����Matlab��������PWM���巢��ģ����ͼ4.13����19��
����
����4.11 �������
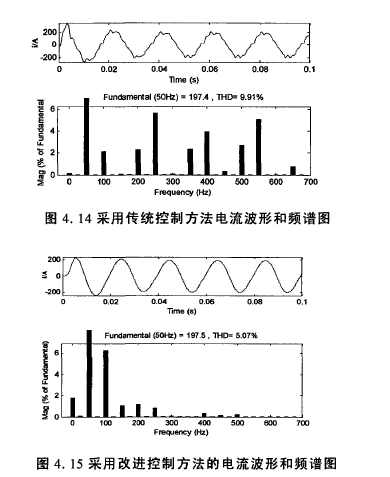
����Ϊ�˽�һ����֤�Ľ���d-q���Ľ�����������Ŀ����Ժ���Խ��,��������Matlab������˷���ģ��,�ֱ���ô�ͳ���Ʒ����Ľ����Ʒ��������˷���,���Է����������˷��������ô�ͳ���Ʒ����ĵ���������κ�Ƶ��ͼ��ͼ4.14�����øĽ����Ʒ����ĵ���������κ�Ƶ��ͼ��ͼ4.15��ͨ�������������ݿ��Եó�:���øĽ���d-q���Ľ������������,г�������ܻ�������9.91%�½����� 5.07%,�Ӷ���֤�˸Ľ����Ľ�������������Ƚ��ԺͿ����ԡ���20��
����
����4.12 ������
�������½����˼��ִ�ͳ�������������豸���ص�,��APF�����˷���,�Ը���APF���ص�����˷������ڿ��˾����Ժ���Ч�Ե�ǰ����,ѡ����һ�����������Ƶ�ѹ��ע��ʽHAPF�������綯�������վ�ĵ�������������HAPF�Ļ����ṹ����ԭ���������ص������������ HAPF�Ŀ��ƹ���,�����˼��ִ�ͳ��г��������ⷽ��,��Դ�ͳ������ȱ��,���øĽ����㷨�����г���������÷���������С��ʵʱ�Ժá���⾫�ȸߡ�����PWM���ƹ���������˸Ľ����������,�ʹ�ͳ������������,�÷���������ٶȿ졢���ȸߡ������з���,��������֤�˸Ľ��Ϳ��Ʒ�������Ч�Ժ��Ƚ��ԡ�

��3�¼��ط������ϵͳ��SCADAϵͳ������3.1SCADAϵͳ�ĸ���SCADA��SupervisoryControlandDataAcquisition��ϵͳ��ȫ��Ϊ���ݲɼ�����ӿ���ϵͳ������������ķ�չ�Ķ�SCADAϵͳ�ļ�����չ���˻��������á���ѧ�����ڲ��ϵķ�չ������SCA...

���Ӧ�Դ��ģ�ֲ�ʽ��Դ�����������ȷ����������Ч�Ĺ�����ͬʱ��Ӧ���ܵ������й��Ĺ��飬��ȫ�µ���òӭ�ӵ�����δ����չ������һ���ȶ������ã����Ͱ�ȫ���ִ���Դ��...

���ٵ���кܶ��ŵ㣬��ͻ�����ص���Ǹ�ת�١��߹����ܶȡ������Խ�С�ȣ����ҿ���ֱ���븺�������ӣ�ʡȥ������װ�ã����ͳɱ����ܹ�����Ƚ������������������������������Ч�ʡ�...
�ڰ��¼�ǿ����������۹�������ƵĶԲ�ͨ��ǰ���¶Ե���������۹�����״�������Ժ��̲110kV���վ�½����̵İ������������ǿ��Եó������ǰ�ڹ滮��ʼ���������̵�ʩ��������ÿ���ζ����й�����۵�ȷ���Ϳ��ƣ����ܿ��Ƶ���������۹����ؼ�����...
�����»����Զ�������������������ϵͳ���5.1������ơ�5.1.1�����Զ�������������������ϵͳ���Ҫ������һ�ַ���Ƶ�ʷdz��ߵ��ֺ�����ʱ��ض����ܷ����������������ڶ�ʱ�����ջٺܶ�Ʋ�����Ʒ������ʱ����в�����ǵ����������ڸ�¥�㣬��һ...
�ڶ����������ϵ�Դ������ϵͳ�Ľṹ2.1ȼ�ϵ�ص綯��������ɡ�����ȼ�ϵ������Դ�ĵ綯��������ȼ�ϵ�ص綯��������FuelCellElectricVehicle��FCEV��[15].������ȼ�ϵ�ص���Dz���Ӧ���������ģ��������ɵ�ѵĸ�����ϵͳ�͵�ѿ��������ȼ��...
��2��Ӧ������ǰ�������2.1Ӧ��������״�ſ��ϲ����繫˾���е�����Զ���һ�ڹ��̵ش��ϲ����Ҹ��¼�����ҵ�������ĺ�������Χ��ͼ2.1,���Լʮƽ��ǧ�ס�������Ͻ�����231ƽ��ǧ�ף��ѿ���32ƽ��ǧ�ף������ϲ���ҵ�ĺ�������ȫ����...
ժҪ����Ŀ�����Ϸ����֣�һ�����������ϵͳ����ϵͳ������ƣ����Ƿ�������������������������о���Ӧ�ô��£���Ҫ���������������л����������ܵĻ����ϣ��Ժ��ڷ������ƹ��ܵ��о������ݹ���������Э��ͳһ���о���ʵ�ַ������ϵͳ��SC...

���Ķ���ά��Ƶķ���������ȵ��о���������ά���Ӧ���ڸ�ѹ���վ��ʵ�ʹ��������...
ժҪ����Զ����Ƕ�������ϵ��豸����Զ��ʵʱ���ӡ�Э�������Ƶ�һ������ϵͳ�����ǽ����������ܵ�������֮��չ���������˼������������ִ������������ͨ�ż��������������������ϵ�Ӧ�á�����Զ����ܹ�������������ä��״������߹���������...