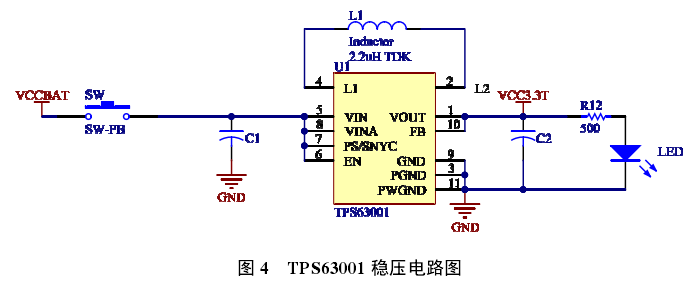
2.3TPS63001稳压电路设计
四旋翼飞行器在飞行过程中,随着电机转速的增加,会造成控制电路电压大幅波动,进而导致各功能模块无法工作,为了避免此类情况发生,设计了TPS63001稳压电路,TPS63001在1.8~5.5V输入时,均稳压输出3.3V,保证系统各控制电路电压处于稳定状态。TPS63001稳压电路如图4所示。
2.4电池电压检测电路设计
四旋翼飞行器运行时,电池处于持续耗电状态,实验中发现电量的持续消耗成为影响四旋翼飞行器飞行稳定性的重要因素。为了消除其对四旋翼飞行器的影响,因此设计了电池电压检测电路,利用RL78G13自带的AD实时检测电池电压,并通过适时调整PWM输出信号的方式对飞行姿态进行补偿,以确保四旋翼飞行器始终处于稳定状态。
2.5其他功能模块电路设计
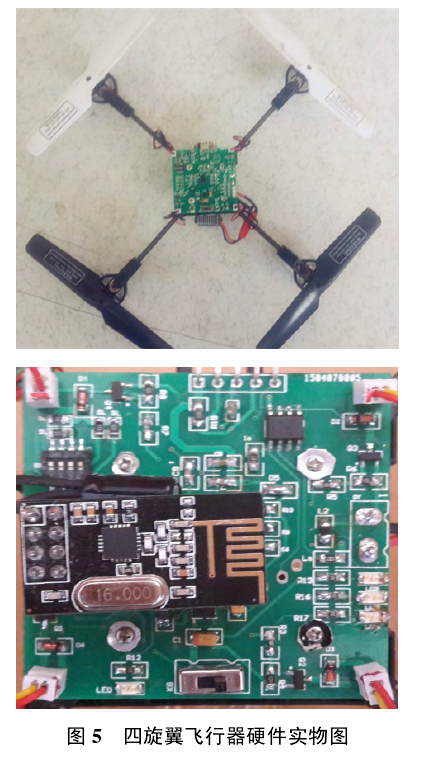
其他功能模块包括RL78G13最小系统、MPU6050数据采集电路、高度检测模块、功能开关电路。RL78G13最小系统包括复位电路及晶振电路;MPU6050用来采集飞行过程中的三轴加速度与三轴角速度信息;高度检测则由GP2Y0A02YK0F模块实现,其工作原理是发射的红外线经过地面反射回来,并由模块输出电压信号,输出的电压值会对应相应的探测距离,RL78G13通过测量电压值就可以得出所探测的距离。设计的硬件实物图如图5所示。
3软件设计
四旋翼飞行器在空间上具有6个自由度,分别为载体坐标系X、Y、Z轴上的加速度与角速度。核心控制器RL78G13利用MPU6050采集这些参数,然后进行姿态解算,最终以PWM控制信号的方式施加到4路空心杯电机上,通过调整各路PWM信号完成相应的飞行控制功能。
3.1控制算法
(1)飞行姿态数据:RL78G13通过MPU6050采集载体坐标系下的三轴加速度与三轴角速度,分别用axB、ayB、azB、ωxB、ωyB、ωzB表示。
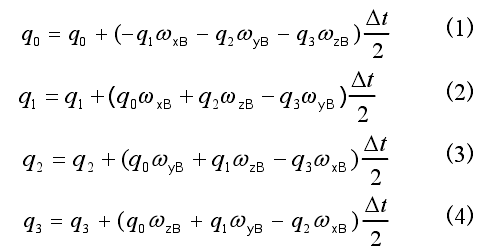
(2)数据更新:由于设计中采用四元数进行欧拉角的计算,而欧拉角将随着四元数的变化而变化,设计中采用四元数的自补偿算法进行数据的更新,如式(1)~(4)所示。式中q0、q1、q2、q3表示四元数,Δt为MPU6050的采样时间。