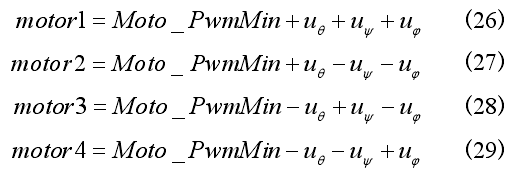
(6)输出整合:令motor1、motor2、motor3、motor4为控制4个电机的PWM输出参数,Moto_PwmMin为PWM基础量(根据不同情况设定,一般为0)。根据理论计算,施加在4个电机上的PWM输出信号如式(26)~(29)所示。
3.2参数整定与调试
设计中采用PID控制算法进行四旋翼飞行器的控制,I是积分项,积分项会随着时间的增加而增大,能够消除系统进入稳态后存在的稳态误差,但是在实际调试过程中,通过增大P值可以抑制稳态误差[2],因此主要是采用PD的控制方式。调试过程中,对P、D值的同时调整会产生的两种控制效果的叠加,以致无法进行每一控制参数的影响分析,故先使D值为零,P值由0增加,初次调试时,四旋翼飞行器自身不存在调节,当P值增加时,根据式(23)~(25)计算所得的uψ、uθ、uφ值均增加,再经式(26)~(29)后,施加在4个空心杯电机上的PWM控制信号均有所变化。调试中,为了防止四旋翼飞行器控制出错而损坏硬件,故将四旋翼飞行器以X字型倒挂固定在一根活动的长杆上,当P值由0增加到4时,四旋翼飞行器出现了翻滚的飞行状态,表明P开始对整体系统起作用,逐渐增大P值,四旋翼飞行器开始产生大幅度的等幅振荡,当P值增大到14时,振荡幅度减至最低,四旋翼飞行器几乎稳定,再增加P值,四旋翼飞行器又开始进行等幅振荡,说明P值为14时为系统自稳的一个分界点。根据查阅的大量资料了解到D值是通过预测系统误差的变化来减少系统的响应时间,提高系统的稳定性[3].调试过程中,逐渐增加D值,当D值增加至0.8时,四旋翼飞行器的自身调节更快,稳定性更高。同时D值的增加会对P值有一定的影响,最终确定P值为13.8、D值为0.8时,系统稳定飞行于长杆上方。当去掉长杆时,四旋翼飞行器能够稳定飞行,但随着飞行时间增加,飞行稳定性越来越差,因此考虑了姿态补偿问题。