3.3姿态补偿
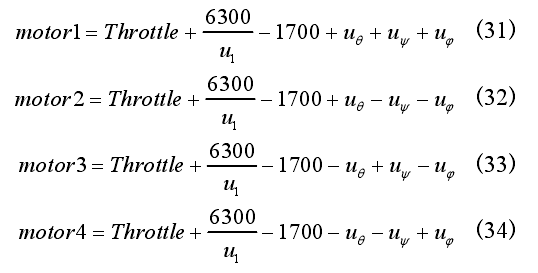
在实际调试过程中发现,电池处于满电状态与大幅度消耗状态下,四旋翼飞行器的飞行姿态存在较大差异:满电状态下,各部分电路工作稳定,电机转速正常,当电池的电量持续消耗时,电机的转速不断降低,因此四旋翼飞行器的整体性能处于下降趋势,为了消除这一影响,利用RL78G13实时检测电池电压,并适时调整PWM输出信号来实现四旋翼飞行器的飞行姿态补偿。由式(26)~(29)知,通过增大Moto_PwmMin可以增大施加在四路电机上的PWM信号,进而增大电机转速,可以实现对飞行姿态进行补偿[4].经调试知,当RL78G13检测到3.7V的电压降到3.5V时,将Moto_PwmMin增至100对飞行姿态的补偿最佳,随后电压值的下降与Moto_PwmMin值的增加基本呈非线性的关系,经大量实验验证,补偿系数符合式(30)的规律,式中u1代表电池当前的电压值。
当检测到的电压值低于2.6V时,飞行姿态将无法得到补偿,必须停止飞行。将式(30)分别代入式(26)~(29),得到(31)~(34),此4式则为最终施加到4路电机的PWM控制信号。
4结论
实验结果表明,本文所设计的四旋翼飞行器结构简易、飞行姿态灵活,实现了空中稳定悬停及按预设路线飞行等两种飞行功能,并实现了无线参数的给定,满足了设计的技术指标与功能要求,解决了因供电电压不断降低而导致的控制不稳的问题。为推动四旋翼飞行器技术的发展提供了很好的参考设计方案。
参考文献:
[1]胡从坤,余泽宇,陈曦晨。四旋翼飞行器控制系统研究[J].科技广场,2014(6):50-56.
[2]宿敬亚,樊鹏辉,蔡开元。四旋翼飞行器的非线性PID姿态控制[J].北京航空航天大学学报,2011,37(9):1054-1058.
[3]阮旭日,王史春。新型四旋翼飞行器设计与制作[J].科技视界,2015(3):21.
[4]易先军,周敏,谢亚奇。四旋翼飞行器控制系统的设计与实现[J].武汉工程大学学报,2014,36(11):59-62.