力学论文

日常生活中我们无时无刻不在与外界物体摩擦接触,触觉感知在其中发挥着重要作用. 例如,手指通过抓摸织物可对织物的表面纹理、光滑性和柔软度等进行判断; 盲人通过触摸盲文凸点获取知识等.从生物力学角度而言,手指部位皮肤具有复杂的生理结构和力学特性,当手指与外界物体接触并产生相对运动时,手指皮肤产生压缩、拉伸等机械变形,诱发位于皮肤深层的机械刺激感受器产生相应的动作电位,将含有触觉信息的信号传递到大脑皮层从而识别物体的形状、纹理等物理特征,因此手指的摩擦滑动在触觉感知过程中起到重要作用.
目前国内外关于皮肤摩擦感知性能方面做了一些研究工作. Miyashita 等通过对不同物理特性材料的热导率、表面能和粗糙度等参数的测量,指出热导率和表面能分别影响触摸时产生的温暖感和丝柔感,而粗糙度对温暖感、丝柔感和光滑感三种主要感觉均会产生影响; Lisa Skedung 等让志愿者通过触摸 21 种不同的印刷纸做出手感判断,发现在分辨光滑和粗糙的印刷纸时表面粗糙度起主导作用,而在辨别一系列较光滑的印刷纸时摩擦力和热导率则更重要. 李炜等通过测试摩擦过程中皮肤的机械信号( 摩擦力、黏着力等) 以及生理信号( 脑电波、皮肤温度和导电性等) ,对皮肤摩擦感知机制进行了客观量化研究,并研究了不同性别皮肤对摩擦不舒适度的感知能力,得出在相同摩擦条件下,女性的不舒适感要强于男性. 庞强等通过摩擦试验采集受试者的各项生理数据并分析了其与主观不适感之间的关系,采用偏最小二乘回归方法对人体由于摩擦产生的不适感进行量化. T Yamaguchi 等建立了一种可以把手指运动转化为 2D 图形从而获取触觉信息的系统,在更微观的层次上对触觉感知进行研究. 从以上国内外研究可以看出,影响皮肤摩擦感知的因素较为复杂,其与接触物体的粗糙度、热导率、压力、皮肤解剖位置以及由此产生的生理反应等关系较大. 当前研究的重点是对皮肤的摩擦感知能力进行客观的量化评定,并将摩擦信号与人体主观感受相结合. 鉴于此,本文作者以与外界物体接触最多的手指为研究对象,把试验过程中所测得的摩擦信号与受试者的主观感受联系在一起,采用客观分析和主观评价相结合的研究方法,研究不同法向力、接触介质、纹理间距以及直径等对手指触觉感知灵敏性的影响,揭示手指皮肤的摩擦感知机理. 研究结果可为改进生活用品的外观纹理结构设计及触觉仿生皮肤的研制等提供参考依据.
1 实验部分
1. 1 样品准备
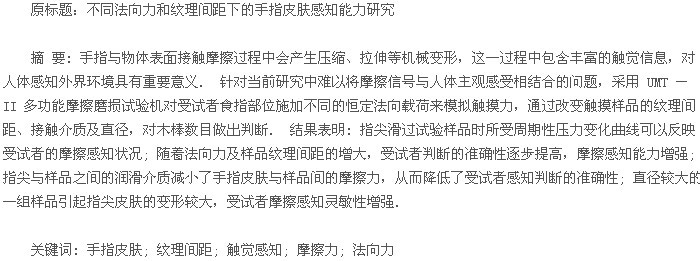
选取8 块长100 mm、宽35 mm、厚2 mm 的镀锌板为底板分为两组,编号为 a、b、c、d 和 1、2、3、4,并且在两组锌板上固定等间距且直径分别为 1. 6 和0. 8 mm 的木棒,作为手指接触样品的纹理间距设计,如图 1 所示. 8 块样品的纹理间距尺寸及木棒根数信息见表 1. 【图1.表1】
考虑到触摸物体过程中右手食指的使用频率较高,故选取受试者的右手食指作为试验对象. 6 名年龄在 22 ~ 26 岁之间,右手食指无异常的健康受试者( 其中男女各 3 名) 参加了本次试验.试验开始前要求手指皮肤未涂抹化妆品或者外用药物,每次试验前受试者在恒定环境下静坐 20 min 保持心情平静,用酒精擦拭受试部位皮肤后进行试验.
1. 2 方法
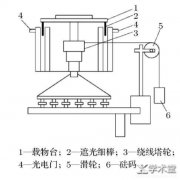
摩擦试验在美国 CETR 公司生产的 UMT - II 多功能摩擦磨损试验机上进行,采用单向滑动模式. 上摩擦副为手指皮肤,下摩擦副为接触样品,试验时手指固定于试验机上悬架部分,接触样品分别粘在 A4白纸上且固定于试验台下端,试验过程如图 2 所示.【图2略】
为确保手指在摩擦运动过程中保持恒定的速度、接触力以及与样品的接触面积,设计并加工了如图 2左侧所示的连接件. 连接件斜下端套筒用于固定手指,连接件垂直上端与摩擦机测力传感器相连. 试验前受试者把右手食指放入连接件的套筒后可与水平面始终保持 30°夹角,以保证食指指腹与样品的最大恒定接触面积. 试验时摩擦试验机上的传动系统通过连接件的垂直上端硅胶垫片将法向载荷施加在指尖,固定于摩擦机上传动系统的食指随着摩擦机以设定的载荷及速度在接触样品上滑动. 在研究法向载荷的影响时 Fn依次设为 0. 2、1、2、3 和 4 N 来模拟手指接触物体的触摸力,运动速度 4 mm/s,运动位移 72 mm. 试验介质分别为干态和在手指表面涂抹洗洁精两种状态,并且在不考虑直径的影响时均选用第一组为试验样品. 在研究样品直径的影响时,法向力保持为恒定 2 N,其他试验条件均不变.环境温度为 20 ± 2℃,空气相对湿度为 70% ± 5%.对于每一受试者,相同试验条件下进行 3 次重复试验,每次试验间隔 20 min. 记录摩擦力及接触力曲线,同时让受试者对滑过的木棒根数进行判断. 为确保试验中的判断不被外界因素所干扰,受试者在试验过程中要求带上眼罩,并且让受试者同时随机触摸另外 4 种不等间距的试验样品,以避免由于样品等距可能造成受试者心理上做出习惯性判断.
2 结果及分析
2. 1 指尖受力与感知状况分析
图 3 为试验过程中手指分别滑过无木棒的镀锌板与样品时指尖皮肤的法向压力和摩擦力随位移变化的典型曲线. 可见手指在滑过样品时法向压力和摩擦力曲线有着明显周期性变化规律[见图 3( b) ],而在滑过镀锌板时曲线变化较为平缓并且没有明显的周期性[见图 3( a) ]. 这是因为试验样品表面凹凸起伏( 既存在木棒自身形状造成的凸起又存在由于木棒的间距造成的凹陷) ,并且手指皮肤也具有非线性黏性等复杂的生物力学特性,在受到外界的挤压、拉伸等刺激时会造成该部位的皮肤产生变形. 当手指在样品表面滑动时,依次经过凸起 -凹陷 - 凸起的重复循环,当经过样品的凹陷处( 木棒之间的空隙) 时,此处指尖实际受力和所受摩擦力明显减小,接着连接件带动手指继续滑动,处于凹陷处的皮肤开始“爬上”相邻的木棒,与木棒的接触面积逐渐增大,这一过程中指尖所受压力和摩擦力都开始逐渐增加,当接触面积最大也就是到达木棒的最高处时,皮肤所受的压力和摩擦力也达到最大,然后手指随着连接件的运动逐渐离开木棒,指尖所受压力和摩擦力又开始减小直至进入下一个凹陷,如此依次循环往复,这一结果与 Lewis 等在研究不同几何尺寸沟槽的摩擦力曲线时的分析相一致.这一运动过程中由于指尖皮肤所受法向压力和摩擦力的大小交替变化,从而使指尖产生了压缩、牵扯及恢复等周期性变形,这些力学信号会刺激位于指尖皮肤内的机械性刺激感受器,使其产生动作电位,把信号传递到人的大脑皮层,经过人脑的分析、计算从而产生感知,对木棒的形状、数目信息做出判断.【图3】

2. 2 法向力、纹理间距对摩擦感知的影响分析
把六名志愿者分别从 1 到 6 进行编号,通过以上摩擦感知试验,分别对不同法向力作用下四种样品的根数做出判断,得到如图 4 所示散点图,其中横线代表样品木棒的实际数目并且由于不同志愿者对同一试验样品的判断结果有重叠,故在散点处的括号内标示出了判断结果相同的人数. 由于样品 a 的纹理较密集间距较小,当法向力设定为 0. 2、1、2 和3 N 时志愿者无法对样品 a 的根数做出判断,所以在上述三种力的作用下无试验结果,即使在 4 N 的法向力作用下,志愿者做出的判断也与实际值差别较大,而且结果较分散[见图 4( a) ]. 在图 4( b ~ d)中可以看出: 随着木棒纹理间距的增大,在同一法向力作用下,受试者判断结果的准确性也逐渐增高,尤其是样品 d,受试者的判断准确性最高. 由此得出,随着对手指施加的法向力及纹理间距的逐渐增大,受试者判断的准确性也逐步提高,摩擦感知能力增强.【图4略】
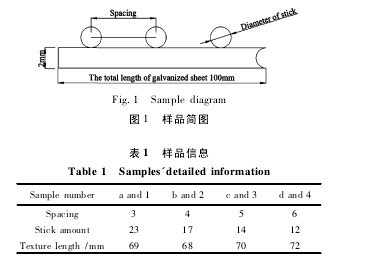
由图 3( b) 结果可知,指尖滑过样品时压力曲线周期性变化的波动程度可以反映出手指滑过样品时指尖皮肤变形程度的大小. 图 5 给出了受试者手指依次在不同法向力的作用下触摸样品 a、b、c、d,得到的指尖所受压力曲线的最大值与最小值之差的平均值和标准差. 从图 5 中可以看出: 随着对手指施加法向力的增大,触摸每种样品时手指皮肤受力最大值与最小值之差逐渐增大,也即手指皮肤的变形程度逐渐增大. 结合试验中受试者的主观判断可以看出: 对于每一种样品其判断的准确性都与指尖皮肤的变化程度呈正相关特性,尤其是对于样品 d 而言,此种现象更为明显,也就是说指尖皮肤的变形程度越大,受试者的触觉分辨能力越强. 这说明指尖皮肤所受压力的变化可以在一定程度上表征人体的触觉感知状况.【图5】
2. 3 摩擦力、纹理间距对摩擦感知的影响分析
实验过程中,通过在样品和受试者指尖部位涂抹洗洁精来改变接触运动时的摩擦系数. 在保证施加到指尖上的法向力依然分别为 0. 2、1、2、3 和 4 N的工况下,让受试者再次对四种样品木棒数目做出判断,得到如图 6 所示散点图. 由于在五种法向力作用下志愿者均无法对样品 a 的根数做出判断,故没有做出 a 样品的散点图. 对比图 4 和图 6 可以发现:
在改变接触介质之后,样品表面变得更为光滑使受试者判断的准确性明显下降,只有在加大法向力和纹理间距的 c 和 d 样品中,受试者判断的准确性才逐渐提高.图 7 示出了在法向力分别保持 0. 2、1、2、3 和4 N的条件下,有无洗洁精介质情况下手指与四种样品接触时的摩擦力对比结果,可以看出在加入洗洁精后指尖皮肤所受摩擦力明显减小,结合图 4 和图 6 中受试者在干态和洗洁精接触介质状况下的主观判断结果,发现对于每一种试验样品而言,在加入洗洁精后判断准确性均有所降低,说明受试者的感知判断的准确性与摩擦力的大小呈正相关,即摩擦力减小则触觉分辨能力也随之下降. 从这一结果可以得出,手指在触摸物体时,接触介质引起的摩擦力变化可以在一定程度上影响触觉感知的灵敏程度.【图略】
2. 4 不同试验样品直径对摩擦感知的影响分析
将第一组试验样品 a、b、c、d 与第二组样品 1、2、3、4 的判断结果进行对比,得到如图 8 所示散点图,由于受试者对样品 1 和样品 a 在此种试验条件下均不能做出判断,所以只示出了第一组样品的 2、3、4 与第二组样品的 b、c、d 的对比结果. 可以看出:
对于木棒直径较小的第二组样品而言判断结果的准确性稍有下降. 图 9 示出了两组样品指尖皮肤受力最大值与最小值之差的平均值和标准差,通过对比发现在相同试验条件下第一组样品的指尖皮肤变形程度大于第二组,因而受试者的感知灵敏程度更强.【图9】

3 结论
a. 手指滑过试验样品时由于指尖皮肤受到挤压和拉伸形变,引起手指皮肤压力和摩擦力的周期性变化,从而可以感知样品的数目信息.b. 随着对手指施加的法向力及样品纹理间距的逐渐增大,受试者判断的准确性逐步提高,手指摩擦感知能力增强.c. 指尖与样品之间的润滑介质减小了手指皮肤与样品间的摩擦力,从而降低了受试者感知判断的准确性.d. 针对本文试验中两组不同木棒直径的样品而言,直径较大的一组引起的指尖皮肤变形量较大,因而摩擦感知灵敏性更高.
参考文献:
[1] Li W. Tribological behavior of skin under reciprocating sliding[D]. Chengdu: Southwest Jiaotong University,2006 ( inChinese) [李炜. 皮肤的往复滑动摩擦特性研究[D]. 成都:西南交通大学,2006].
[2] Li Y F. Experimental research on frictional and elastic propertiesof human skin[D]. Nanjing: Nanjing University of Aeronauticsand Astronautics,2008 ( in Chinese) [李远峰. 人体皮肤摩擦和弹性性能的试验研究[D]. 南京: 南京航空航天大学,2008].

进入近代以来,力学在各个领域做出了巨大贡献,航空航天,土木工程,机械制造,交通运输行业,处处都可见力学的影子.力学在起着巨大作用,下面是生活中的力学论文8篇,供大家参考阅读。...

力学的应用范围非常广,能够在机械建筑、航空航天、水利运输、日常工作、人类生活等诸多方面都具有一定的应用,为我们的国家发展和社会进步都带来了非常大的贡献。...

摩擦是一种极为普遍的力学现象, 不仅固体与固体的接触面上有摩擦, 固体与液体的接触面或固体与气体的接触面上也有摩擦。...

电子探针显微分析技术(EPMA)可以将微区化学成分与显微结构对应起来,直观地显示摩擦表面的形貌特征以及各元素的含量,已经成为摩擦学领域分析的重要手段之一。 ...
落体法测角加速度测量刚体的转动惯量在传统实验教学中往往忽略摩擦力矩随转速变化对实验结果的影响, 虽然测量结果能控制在较小的相对误差范围之内, 但不利于学生对实验中各种干扰因素的认知和了解。...

物理学对摩擦力进行了重点研究, 通过对摩擦力的理论分析, 积极合理地利用摩擦力, 最大限度地造福人类, 减少摩擦对人们造成的不利影响, 让物理学知识在生活中得到充分的利用。...
目前减阻技术研究在机理方面较为深入,但在应用上的探讨较薄弱,多停留在实验室阶段,较少涉及其可靠性、经济性、以及环境适应性的评价。建议后续研究多向这方面侧重。...