机械工程论文

基于驾驶模拟器共测试采集到了220例有效样本,驾驶员注意力集中组有107例,驾驶员注意力分散组(需完成次要任务)有113例。
3.2、避撞方式
结合视频以及驾驶模拟器采集的车辆运动学和动力学数据,对驾驶员在追尾危险工况下的避撞方式进行分类统计,驾驶员未采取避撞措施的有4例样本。驾驶员的避撞方式主要分为仅制动(55%)、仅转向(17%)和转向+制动(26%)等3类,共计216例。
3.3、驾驶员反应时间
驾驶员制动反应时间定义为危险产生到驾驶员开始制动的时间。将危险产生时刻定义为前车开始制动时刻,即前车车速开始急剧降低的时刻。根据驾驶模拟器输出的车辆踏板位置参数确定驾驶员的开始制动时刻,即将驾驶员开始制动的时刻定义为制动踏板位置参数开始产生变化的时刻。
驾驶员转向反应时间定义为危险产生(前车开始制动时刻)到驾驶员开始转向的时间。驾驶员向左转向避撞过程包括4个时刻点,即危险产生时刻t1、转向开始时刻t2,驾驶员左打转向盘角度最大时刻t3,驾驶员右打转向盘角度最大时刻t4。图4为某转向避撞样本的转向盘转角曲线(向左转向转向盘转角为正,向右转向转向盘转角为负)。根据Benderius的研究[9]
确定驾驶员转向开始时刻:当转向盘转角小于-20°后达到第1个局部极小值的时刻定义为t4时刻,t1和t4时刻之间转向盘角度最大的时刻定义为t3时刻,t3时刻之前第1次出现转向盘角度小于8°的时刻为t2时刻。按照上述方法可确定实际转向过程中驾驶员转向开始时刻,进而确定驾驶员转向反应时间。
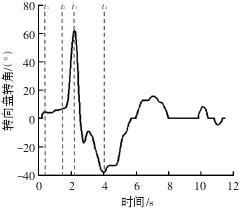
图4 某转向避撞样本的转向盘转角曲线
当驾驶员采取制动+转向的避撞方式时,驾驶员反应时间为制动反应时间和转向反应时间的最小值。
表2 驾驶员反应时间统计特征值

3.4、驾驶员避撞操作力度
驾驶员避撞操作力度指驾驶员避撞行为的操作剧烈程度,驾驶员的避撞行为包括制动避撞和转向避撞,因无法用相同的参数来表征两种方式的驾驶员操作力度,故需分别定义制动避撞(178例)和转向避撞(95例)的操作力度。制动操作力度通过最大制动减速度和最大制动减速度梯度来表征,制动减速度梯度反映了制动速度的快慢;转向操作力度则通过最大转向盘转角和最大转向盘角速度来表征,转向盘转角反映了驾驶员转向程度,转向盘角速度则表示驾驶员转向的快慢。最大制动减速度、最大制动减速度梯度、最大转向盘转角和最大转向盘角速度的统计特征值如表3所列。
表3 避撞操作剧烈程度参数统计特性

针对178例驾驶员有制动行为的样本,以最大制动减速度和最大制动减速度梯度为变量进行k-means聚类分析,根据迭代记录,通过2次迭代后聚类中心收敛,制动响应操作非常剧烈的有8例。针对有转向行为的95例样本,以最大转向盘转角和最大转向盘角速度为变量进行k-means聚类分析,根据迭代记录,经过6次迭代后聚类中心收敛,其中,驾驶员转向响应操作非常剧烈的样本有19例。转向+制动避撞时,若制动或转向任何一种避撞方式的操作非常剧烈,则该转向+制动避撞的操作力度为非常剧烈。统计结果如表4所示。
4、安全收益分析
采用事故发生率作为追尾危险工况下驾驶员响应的安全收益评价指标。本文设计的危险场景中,左侧车道上不存在会与本车发生冲突的其它车辆,即不存在二次碰撞的情况,因此本文的事故发生率是指一次碰撞发生率。
表4 避撞操作力度统计

4.1、不同驾驶员响应特性下的事故发生率
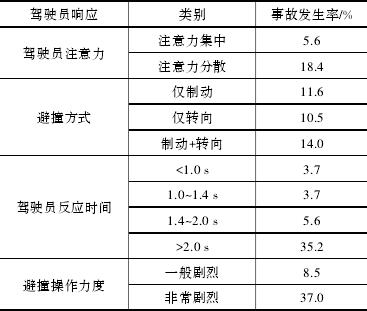
在追尾危险工况中,不同驾驶员响应特性下的事故发生率如表5所列。驾驶员分心(完成次要任务)时的事故发生率(18.4%)是驾驶员注意力集中时(5.6%)的3倍多。3种避撞方式的事故发生率在10%~15%之间,差异不明显,其中通过转向避撞的事故发生率比制动避撞时低,3种方式都能在一定程度上避免事故的发生。
当驾驶员反应时间小于1.4 s时,事故发生率较低,在3.7%左右。而当驾驶员反应时间大于2.0 s时,事故发生率提高了9倍(35%)。当驾驶员响应操作非常剧烈时,碰撞事故的发生率达到37%,远高于一般剧烈操作的事故发生率。
表5 不同驾驶员响应特性下的事故发生率
4.2、二元Logistic回归分析
事故发生率是各响应特性综合作用下的最终体现,因此在进行安全收益分析时,需综合考虑各响应特性的影响。Logistic回归模型是研究因变量为二分类或多分类观察结果与影响因素(自变量)之间关系的一种多变量分析方法[11]。这里因变量为碰撞与否,故采用二元Logistic回归分析。建立事故发生率与驾驶员注意力、避撞方式、反应时间以及操作剧烈程度之间的回归模型:

0引言随着我国经济快速发展,汽车数量持续增长,交通事故也急剧增加。我国交通事故数量与死亡人数稳居世界第一。统计数据表明,大约每5分钟就有一人因为交通事故而死亡,每分钟都会有一人因为交通事故而伤残。每年因交通事故所造成的经济损失达数百亿元...
驾驶风格(drivingstyle),是指一个人选择开车的方式或者习惯性的驾驶方式[1].驾驶风格对驾驶员驾驶行为的预测和解释具有整体性功能。自1993年,Elander等人首次提出驾驶风格的概念并开发了驾驶风格问卷(drivingstylequestionnaire)后,驾驶风格问卷...
一、研究背景危险知觉(hazardperception,HP),是指驾驶员快速识别交通情境中的危险并做出反应的一种技能①。由于年龄、视觉搜索模式和驾驶技术②③等的差异,不同驾驶经验的驾驶员识别潜在道路危险和对危险做出反应的速度不同。大量...
0引言随着我国公路建设的发展,交通事故也层出不穷,公路隧道路段尤其是公路隧道口附近的交通安全状况很不乐观。据统计资料,各等级隧道洞口附近的事故远远高于隧道内部路段[1-2],在隧道入口200~400m路段内发生的事故占事故总数的70%以上[3].驾驶员在出入...
驾驶愤怒是在驾驶过程中发生的具有负性情绪性质的,包含认知、行为反应的多维结构,是从轻微激惹到极度愤怒的体验过程[1].驾驶愤怒可以分为驾驶特质愤怒和驾驶状态愤怒。驾驶状态愤怒指当遇到路上的某一特殊事件或一系列事件时个体的情感和生理唤起。状态愤...
1.前言驾驶行为包括安全驾驶行为和非安全驾驶行为。一般来说,安全驾驶行为是指亲社会驾驶行为(ProsocialDrivingBehavior),即是指在驾驶过程当中,主动给对方车辆让道、避让、与其他道路使用者良好合作的驾驶行为[1].非安全驾驶行为包括:愤怒驾驶[2],...
1引言驾驶员由于年龄、性别、驾驶经验和速度选择等的不同,他们发生交通事故的风险不同。研究发现,年龄低于25岁或大于65岁的驾驶员、女性驾驶员、驾驶时速度过低或过高的驾驶员,他们不但发生事故的风险高,而且事故也更严重[1].另外,年轻...
引言现有道路设计相比以前已较为科学与完善,但从驾驶人角度出发的考虑仍然有欠缺。交通工程中,当道路符合设计规范时,驾驶人由于自身特点,在某一特定环境如隧道中驾驶时,其驾驶行为可能会受较大影响,甚至威胁到行车安全。作为城市快速路的咽喉路段,隧...
1概述目前国内驾驶员培训整个行业还是处于比较粗放型的发展和管理阶段,尤其是地县级城市的驾校,其教学方法灵活性差、效率低,管理方法比较陈旧,现行的管理方式和管理体制不仅无法满足培训机构的发展需要,还浪费了大量的人力和物力,降低了工作效率,已...
1概述道路运输管理系统是由人、车辆和交通环境三个要素组成的,这三个要素的协调程度决定了道路运输管理系统的安全状况。人的不安全行为和车辆的不安全状态被认为是道路运输事故发生的直接原因,道路运输和驾驶员的安全管理被认为是道路运输事故发生的间接...