机械工程论文

【第五篇】论文题目:包装生产线搬运机械手设计
摘要:针对搬运机械手的局限性和用机械手代替人力劳动, 提高生产效率的问题设计了包装生产线搬运机械手, 介绍了其工作原理, 组成部分, 设计参数, 设计特点, 工作流程和对机械手尺寸设计校核, 阐述了搬运机械手技术的发展方向。
关键词:机械手; 生产效率; 发展方向;
机械手是近几十年发展起来的一种高科技自动化生产设备, 是在机械化、自动化生产过程中发展起来的一种新型装置, 在现代化生产过程中, 机械手被广泛的运用于自动化生产线中, 机器人的研制和生产已成为高技术领域内, 迅速发展起来的一门新兴技术, 它更加促进了机械手的发展, 使得机械手能更好地实现与机械化和自动化的有机结合。机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器, 它有多个自由度, 可用来搬运物体以完成在各个不同环境中工作。
1 包装生产线搬运机械手设计
工业机械手可以用于简单重复的操作方面节省人力, 其效用是代替从事繁重的工作, 危险的工作, 单调重复的工作和恶劣环境下的工作等方面尤其明显。通过编程来完成各种预期的作业任务, 机械手虽然目前还不如人手那样灵活, 但它具有能不知疲劳不断重复和劳动, 精确度高、不惧危险, 抓举重物的力量比人手大等特点, 因此机械手越来越广泛的得到了应用。目前国内外应用于生产实际的工业机器人特别是示教再现性机器人不断增多, 而且计算机控制的也有所应用。
1.1 搬运机械手工作原理
本次设计鉴于生产线搬运托盘抓手的局限性 (对小于等于一定尺寸的箱子适用) , 搬运的箱子的尺寸大于给定的尺寸, 无法对其搬运。主要是对托盘上的一些挡板设计的不合理 (不可调节尺寸大小) , 所以要对其加以分析, 设计, 使其应用范围更广。
该机械手主要是对物料进行抓取, 采用气压传动方式驱动, 气缸最大压力为0.4MPa。机械手的抓取部分为插齿式, 采用2个两个不同的气缸与之相互动作, 实现物料的抓取。机械手工作时, 其中气缸推动活塞杆运动, 根据物料的大小对物料进行固定。当机械手到达所指定位置后, 控制插齿的气缸运动, 活塞杆收回, 物料落下, 再次返回取料位置, 在返回途中气缸运动, 使其回到初始状态。
1.2 搬运机械手组成部分
包装生产线搬运机械手机械部件主要包括手部, 手臂前后伸缩部分, 夹板上下升降夹紧结构, 转接部分以及支撑架。
手部工作原理:物体进入机械手指之后, 通过上下气缸作用, 使夹板加紧物件, 机身转动到指定位置, 前后向气缸使机械手的手部向后缩, 实现物件的移动。
手臂的前后伸缩部分:由直线气缸带动实现, 当直线气缸工作时通过活塞杆行程的变化, 顺着前后导程方向, 完成手臂的伸缩运动。
机械手的夹紧结构工作原理:当物体进入机械手的手部时, 上下气缸的开始工作并通过活塞杆行程的变化, 沿着上下导程方向, 使夹板向下夹紧物体, 物体被固定后通过机械手的机身的旋转, 使物件放于指定位置。
1.3 搬运机械手的工作流程:
机械手的原位→机械手前伸→物体放于机械手上→机械手向下伸缩压紧物体, 使其固定→机械手机身向左回转90°→机械手松开工件→机械手向上运动松开物体, 使其松动→机械手向后缩, 放下物体→机械手机身向右回转90°→机械手前伸→机械手复位→依次循环。
2 机械手的设计参数
机械手的设计参数包括:机械手的最大抓重、运动速度、手臂伸缩行程、工作半径和定位精度。
首先, 机械手的最大抓重是其规格的主参数, 目前机械手最大抓重以10公斤左右的为数最多。
其次, 运动速度是机械手主要的基本参数。操作节拍对机械手速度提出了要求, 设计速度过低限制了它的使用范围。而影响机械手动作快慢的主要因素是上下导程及前后导程的速度。机械手动作时有启动、停止过程的加、减速度存在。
再次, 除了运动速度以外, 手臂设计的基本参数还有伸缩行程和工作半径。大部分机械手设计成相当于人工坐着或站着且略有走动操作的空间。过大的伸缩行程和工作半径, 必然带来偏重力矩增大而刚性降低。在这种情况下宜采用自动传送装置为好。
最后, 定位精度也是基本参数之一。该机械手的定位精度为土0.5~±lmm。
3 设计特点
包装生产线搬运机械手与传统搬运机械手不同特点:
(1) 本设计包装生产线搬运机械手可抓取10kg-15kg的物体, 可以解决一般物体的抓取, 提高搬运时工作效率, 并且有较高的重复定位精度。
(2) 包装生产线搬运机械手挡板和夹板都由气压缸控制, 可随搬运时箱子的大小来设定挡板和夹板的位置, 从而避免搬运时箱子的尺寸大于给定的尺寸, 无法对其搬运。
(3) 包装生产线搬运机械手搬运物体稳定性好, 夹紧效果好。
4 结束语
(1) 鉴于生产线搬运托盘抓手的局限性, 搬运的箱子的尺寸大于给定的尺寸, 无法对其搬运。对托盘上的挡板设计的不合理 (不可调节尺寸大小) , 对其加以分析, 设计, 使其应用范围更广。
(2) 包装生产线搬运机械手具有能不断重复和劳动, 不知疲劳, 精确度高、不惧危险, 抓举重物的力量比人手大的特点, 可以代替从事繁重的工作, 危险的工作, 单调重复的工作, 使生产效率大幅度提高。
参考文献
[1]王世斌, 亢一澜.材料力学[M].北京:高等教育出版社, 2007.
[2]濮良贵, 纪名刚.机械设计[M].第七版.北京:高等教育出版社, 2001.
[3]孙振燕.气动搬运机械手的机械结构设计思考[J].装备制造技术, 2014 (3) .
[4]王建军.搬运机械手仿真设计和制作[J].机械设计与制造, 2013, 01 (01) :49-52, 56.
[5]韦尧兵, 姜明星, 刘军, 等.气动搬运机械手虚拟设计[J].液压与气动, 2009, 03 (05) :04-06.
[6]陈伟, 陈丹.自动搬运机械手综述[J].东方教育, 2015 (6) .
[7]孙兵, 赵斌, 施永辉.物料搬运机械手的研制[J].机电一体化, 2005 (02) .
点击查看更多:机械手设计论文
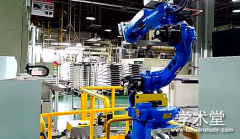
新能源汽车定转子冲片生产是大批量的叠片生产, 冲压机械手的应用使得这种具有循环性、危险系数高、节奏快的加工的效率得到明显提高, 同时有效节约人力劳动成本, 提高操作人员自身安全以及设备的安全性, 保持较高的产品产能、质量和工艺稳定性。...

主动安全技术在提高汽车行驶安全性、控制交通事故发生等方面起到促进作用,要在实践过程中细化分析汽车被动安全技术应用问题,高效利用多种主动安全技术的同时持续改进汽车运行质量,提高运行安全性、智能化、经济性等。...

当今社会科学技术在不断发展,各式各样的科学技术都在互相结合使用,这就推进了技术新领域的改革创新。在机械工程中运用了微电子和计算机技术组成了机电一体化,从而使机械工业领域的技术构造、产品结构及生产管理模式得到了很大的改善。这就证实了在工业产...

本文通过对基于三菱PLC伺服定位机械手的硬件和软件设计, 实现了工件搬运的自动控制。该系统结构简单, 编程较易上手, 运行精度较高, 具有一定的实用性。...
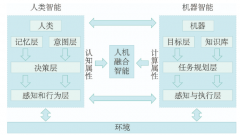
阐述了人机交互与人工智能的关系,介绍了人机融合智能的探索方法,即把人与机器有机融合在一起;分析了智能人机交互目前的标准进展;最后分析人机交互未来发展的重点方向是感知交互和急需解决的伦理问题。...

机械手臂种类较多, 每个类型的手臂之间结构之间存在着显著的差异。因为其内部根据特殊要求的电子电路和设计的圆截面棒。...
1我国机械制造技术发展的现状机械制造技术是研究产品设计、生产、加工制造、销售使用、维修服务乃至回收再生的整个过程的工程学科,是以提高质量、效益、竞争力为目标,包含物质流、信息流和能量流的完整的系统工程。20世纪70年代以前,产品的技术相对...

机械手臂主要分为两大类, 一类是工业夹持器;另一类是仿生灵巧手。工业夹持器主要是针对特定的需要夹持的对象而设计的, 例如需要夹持某个球形物体, 那么机械手臂与物体的接触表面也将会被设计成弧形的。...
随着智能装备的不断发展, 越来越多的企业机械手臂的使用, 机械手臂不仅效率高, 而且国产化的不断发展也使其成本在逐步降低。...

电气复合驱动柔性欠驱动机械手, 指根节由步进电机驱动、笔形气缸推动2个含扭弹簧的指节协调转动。指根节的精确调整使得机械手具有很好的尺寸适应性, 带扭弹簧的串联双铰链结构可以很好地控制机械手与被抓物体间的接触力。机械手配合视觉系统在无需传感器的条...