机械工程论文

摘 要: 分析机械手的工作原理, 深入理解机械手的工作过程, 重点分析影响机械手工作效率的实际因素, 从而得出相应解决方案, 提高机械手模具的工作效率。
关键词: 机械手; 效率; 工作原理;

随着汽车模具行业的高速发展, 自动化的机械手在冲压生产过程中的应用已经十分普遍, 需求已经从能实现正常自动化生产到高效自动化生产的转变, 而如何实现机械手稳定高效的生产成为各大企业关注的重点。
1、 常用机械手类型
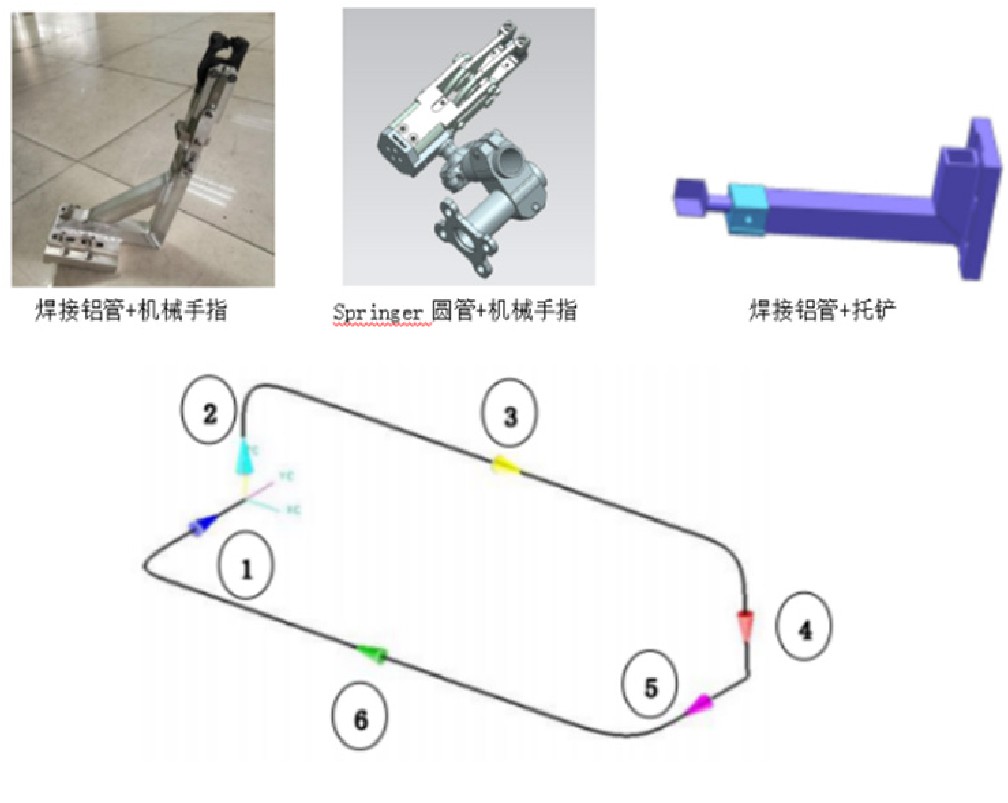
1) 焊接铝管+机械手指。机械手指为标准件, 连接杆铝管焊接而成, 制造成本相对较低, 但调整灵活度不够[1]。
2) Springer圆管+机械手指。机械手指和连接杆均为标准件, 制造成本相对较高, 由于采用的圆管加接头形式的连接, 因此调整非常的灵活方便[1]。
3) 焊接铝杆+托铲。此种类型的机械手只能起到托举产品作用, 不能夹持产品, 适合产品刚性较好的场合[1]。
2、 机械手的工作原理
机械手自动化生产是通过冲床[2]和机械手的周期性往复运动[3]来实现 (见图1) , 如下过程: (1) 拾取制件 (蓝色) ; (2) 提升制件到传送高度 (青色) ; (3) 传送制件到下一工位 (黄色) ; (4) 下降到放件位置 (红色) ; (5) 后撤释放制件 (紫色) ; (6) 返回拾取下一制件 (绿色) 。
图1 机械手类型及曲线
3、 机械手效率提升
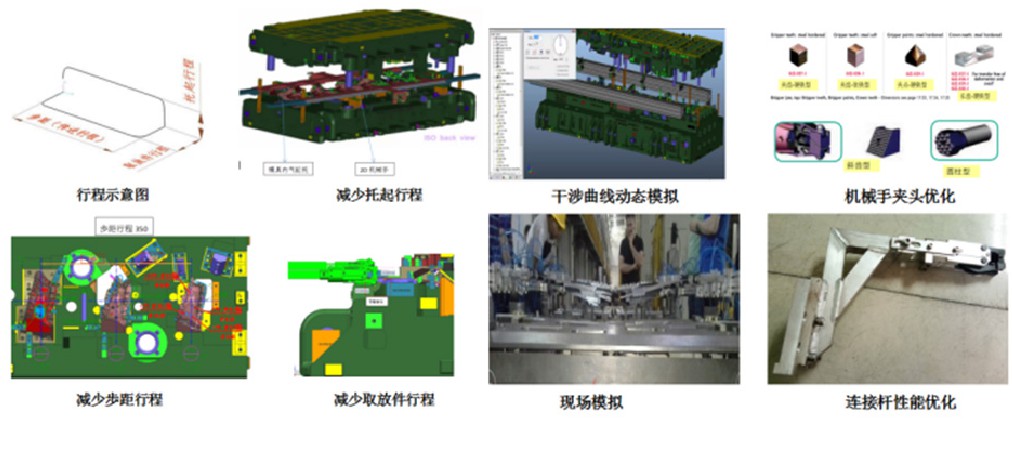
1) 减少行程。机械手做周期反复运行的三个行程 (托起行程, 歩距行程, 取放件行程) 中任何一个降低都将提升机械手的工作效率[4] (见图2) 。 (1) 托起行程降低:将产品的机械手托起改为模具气缸托起, 此种情况下机械手的托起行程为零; (2) 歩距行程减少:在保证模具有足够空间放置工作零件的时候, 选用最少歩距行程; (3) 取放件行程减少:在保证机械手能够完全退出模具工件的情况下, 导套往内移到极限位置, 同时对导套座子进行适当避位以获得最小的取放件行程。
2) 干涉曲线模拟。通过导入机械手干涉曲线, 应用软件对机械手进行动态模拟, 提前排查问题[4]。
3) 机械手夹头优化。不同的产品形状选择合理的机械手夹头有利于提高机械手工作的稳定性[4]。如带斜面产品可以用斜齿型的夹头, 复杂型面产品可选用夹点类型夹头。
4) 现场模拟。现场模拟可以很容易看出机械手夹持产品的稳定性, 抖动, 低头, 避位等情况。
5) 连接杆性能优化。机械手连接杆尽量做结实, 减少机械手生产过程中的抖动, 提高机械手工作的稳定性。
图2 提升机械手效率方案汇总
4、 结束语
通过对机械手工作原理解析, 结合工作实践挖掘出能提高机械手工作效率点。机械手效率每提高一点, 单位时间生产的产品越多。对大批量生产而言, 提高极小的效率能够产生极大的经济效益, 机械手工作效率也是成为冲压自动化生产中非常关键的一环。
参考文献:
[1]段来跟.多工位级进模与冲压自动化[M].北京:机械工业出版社, 2018.22-32.
[2]王平.冲压加工设备及自动化[M].武汉:华中科技大学出版社, 2006.35-46.
[3]廖伟.汽车覆盖件模具设计技巧, 经验及实例[M].北京:化学工业出版社, 2013.35-50.
[4]高晖.汽车冲压[M].北京:机械工业出版社, 2015.25-33.
新能源汽车定转子冲片生产是大批量的叠片生产, 冲压机械手的应用使得这种具有循环性、危险系数高、节奏快的加工的效率得到明显提高, 同时有效节约人力劳动成本, 提高操作人员自身安全以及设备的安全性, 保持较高的产品产能、质量和工艺稳定性。...

本文通过对基于三菱PLC伺服定位机械手的硬件和软件设计, 实现了工件搬运的自动控制。该系统结构简单, 编程较易上手, 运行精度较高, 具有一定的实用性。...

机械手臂种类较多, 每个类型的手臂之间结构之间存在着显著的差异。因为其内部根据特殊要求的电子电路和设计的圆截面棒。...

机械手臂主要分为两大类, 一类是工业夹持器;另一类是仿生灵巧手。工业夹持器主要是针对特定的需要夹持的对象而设计的, 例如需要夹持某个球形物体, 那么机械手臂与物体的接触表面也将会被设计成弧形的。...
随着智能装备的不断发展, 越来越多的企业机械手臂的使用, 机械手臂不仅效率高, 而且国产化的不断发展也使其成本在逐步降低。...

电气复合驱动柔性欠驱动机械手, 指根节由步进电机驱动、笔形气缸推动2个含扭弹簧的指节协调转动。指根节的精确调整使得机械手具有很好的尺寸适应性, 带扭弹簧的串联双铰链结构可以很好地控制机械手与被抓物体间的接触力。机械手配合视觉系统在无需传感器的条...

近年来,数控机床被广泛运用于装备制造业。数控机床生产效率高、加工自动化程度高,产品质量稳定性好、且零件加工精度比较好。但是应用数控机床进行机械加工时加工效率会受到很多因素的影响。因此,分析制约数控机床机械加工效率提高的主要原因,明确制约数...

在小型机床的生产流水线中, 该类机型尤其是ABB型的智能化设备使用PLC控制, 灵活方便, 起到了至关重要的作用。通过对机器人主要结构和功能特点的分析, 以及对控制面板基本应用操作的介绍...

随着现代工业自动化的发展,出现了各种数控加工中心,它在减轻工人劳动强度的同时,大大提高了劳动生产率。但以往数控加工中常见的上下料工序, 通常仍采用人工操作或传统继电器控制的半自动化装置。...

机械手臂是目前在机械人技术领域中得到最广泛实际应用的自动化机械装置, 在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。...