机械工程论文

摘要:随着人工智能技术的迅速发展,其在煤矿的应用也越来越广泛。在煤矿生产过程中,机器人换人需求的迫切性加快了煤矿机器人的产业化应用,也加速了人工智能技术在煤矿机器人中的应用。对人工智能技术在煤矿机器人中的应用进行了分析探究,介绍了人工智能技术的主要研究内容及其在工业中的应用,分析了人工智能在煤矿生产中的应用现状,阐述了将人工智能技术有效地应用于煤矿机器人的构想,并对人工智能在煤矿机器人中发展前景进行了展望。
关键词:人工智能; 煤矿机器人; 智能感知; 智能决策; 智能监测;
Application of artificial intelligence in coal mine robots
ZHANG Chen FAN Yong LI Yibin YANG Tong
School of Control Science and Engineering,Shandong University School of Rail Transportation,Shandong Jiaotong University Shandong Institute of Advanced Technology,Chinese Academy of Sciences
Abstract:With the rapid development of artificial intelligence(AI) technology, the application of AI in the coal industry has become more and more extensive. The urgent demand for robot substitution in mining production has accelerated the industrial application of coal mine robots and the application of AI technology in coal mine robots. The application of AI technology in coal mine robot were analyzes and explored, the main research content of AI technology and its application in industry were introduced, the application status of AI in the coal industry was analyzed, and the idea of applying AI technology to coal mine robots effectively was elaborated, and the future development of AI in coal mine robots was prospected.
0 引言
煤矿井下生产作业过程存在下井人员多、灾害风险高、事故率高、作业环境恶劣、环境污染严重等问题[1]。面对高危的井下作业,煤矿机器人成为实现煤矿井下安全、高效生产目标的重要途径之一。煤矿机器人可以协助或替代人完成一些危险的采矿作业劳动,实现煤矿的安全高效生产。为了实现“无人则安”,机器人代替矿工进行井下作业是大势所趋。
随着“中国制造2025”“德国工业4.0”“美国工业互联网”等战略的提出,5G通信、物联网、大数据、云计算和人工智能等技术的逐渐成熟,极大地推动了我国传统制造业的转型升级[2]。作为一种新兴的科学技术,人工智能能够使计算机技术更加精准、快速、便捷地完成人类大脑无力承担的复杂科学计算,实现对人脑的部分代替、延伸和加强,进而创造出能代替人类完成复杂危险作业的智能机器[3]。
未来的煤矿生产将向无人化、自主化、智能化、高效化发展,其中人工智能技术将起到无可替代的作用,多样化的人工智能技术将会应用到煤矿机器人中[4]。虽然当前人工智能在工业煤矿领域的应用还处于摸索期,然而随着人工智能技术在煤矿领域中越来越广泛的应用,建设无人化作业矿井势在必行[5]。
1 煤炭行业亟待解决的问题
我国煤炭行业经历了40多年的发展历程,煤炭矿产资源的开采逐渐趋于智能化,但当前依旧存在一些瓶颈问题亟待解决。
1.1 技术设备亟需升级
我国煤炭的开采、运输虽已经历了数字化、自动化、信息化等阶段,但整体技术水平与生产设备依然低于发达国家[6]。2019年,原国家煤矿安全监察局提出了加快掘进、采煤、运输、安控、支护和救援等煤矿机器人的产业化应用。当前的煤矿机器人已不再是仅仅完成简单的重复性操作,它可以感知周围环境并实时反馈外界的信息,但其还不具备独立的思维、识别、推理、判断与决策能力,仍需要人为参与来完成一些复杂的工作任务。
1.2 安全生产隐患严重
煤炭行业属于高危行业,生产中的每个环节都存在着各种危险,水、火、瓦斯、煤尘、地质构造等灾害频发,未知的复杂地下环境严重威胁井下作业人员的生命安全。基于物联网、大数据、云计算等的煤矿智能监测与预警技术虽在很大程度上降低了事故的发生率,保障了煤矿的安全生产,但仍然存在诸多问题。传感器的精度和灵敏度较差导致前兆信息采集不全面、不及时;监测系统相互独立、功能单一,云端平台集成应用融合深度不够;监测系统数据库安全性较弱;监测设备缺少深度学习以及自适应能力[7]。
1.3 环境污染严重
煤矿在开采过程中会产生煤尘,也会产生一氧化碳、二氧化碳等有害气体污染大气环境[8]。同时,煤矿开采产生的生产污水中含有大量重金属、酸性物质等,易渗入土壤或进入地下水污染地质及水源。煤矿开采工程会侵占大量植被及农业耕地,开采后土地易出现坍塌现象导致地表层破坏[9]。
2 人工智能的主要研究内容
2.1 模式识别
人工智能技术中的模式识别借助先进计算机技术强大的数据采集、分析和处理功能,通过提前设置相应的程序来模拟人类对于外界环境的感知及识别功能。融入模式识别的智能机器人可以更好地模拟人类的感官能力,对字符、声音、图像、场景及其融合信息进行高准确度的识别,通过多源信息的获取对周围环境进行精确的感知与建模[10]。
人工智能技术中的机器视觉作为最重要的环境感知方式之一,模拟人类的视觉能力,提高机器人对于井下环境、作业过程和反馈现象的理解能力。融入机器视觉的智能机器人一是能够很好地适应井下作业环境,与其他人造设备进行良好的协作;二是能够捕捉到更多的外界景观信息,通过立体视觉、视觉检验以及动态图像分析技术,对图像的内容进行深入的理解与挖掘;三是能够判断作业进程的地底反馈现象,将机器人的状态信息反馈给运动控制系统[11]。
2.2 专家系统
专家系统是将人类专家的知识和经验进行建模,用于解决系统决策、工艺、故障等问题的技术。通过人工智能技术,为井下系统建立知识系统,模拟人类解决作业过程中遇到的实际问题。人类专家在解决实际问题时,可以根据当前系统的状态,例如设备显示与声音、运行数据参数、产品的状态,对系统故障进行预测,判断故障点并生成故障排除方案。因此,专家系统常用于故障预测、诊断和故障排除。此外,在制造业领域,专家系统也用于生产方案决策、生产工艺优化、生产协调以及设备参数优化。
2.3 机器学习
人工智能技术中的机器学习通过模型框架和算法来模拟人类的学习能力,通过训练数据、环境信息和反馈,自动提取内在规律,以提高系统的性能,提高环境适应性和鲁棒性。融入机器学习的机器人具备类人的规律提取、知识总结能力,从收集到的大量信息资源中找出有效信息,并加以学习来提升自身的智能化水平。机器学习技术能够有效解决突发状况下的系列难题,很大程度上降低人力成本与生产成本[12]。
2.4 分布式人工智能
分布式人工智能系统通过科学合理地结合人工智能与计算机技术,将异构的多智能体系统进行协调调度和控制,从而增强人工智能系统的性能,提升任务执行能力,提高智能机器人中的各个独立系统的协同工作效率。当智能机器人遇到一些突发情况时,依旧可以保障各个分系统进行正常工作。当前分布式人工智能系统还处于研发起步阶段,技术难点在于如何协调好不同系统的运行规则[13]。
3 人工智能在煤矿机器人中的应用现状
3.1 人工智能在煤矿机器人运动控制中的应用
为了确保煤矿机器人能够在复杂的井下环境中正常运行,研究学者将专家系统、人工神经网络等人工智能技术应用于机器人运动控制方式、算法及协同作业等方面。煤矿机器人通过模拟人类专家思维及知识水平,可以解决一些复杂多维的非线性问题,降低动力学系统分析、参数设置及数据处理的运算量,提高控制效率及准确性。
王念等[14]研究人员基于嵌入式ucos设计了一款智能矿井机器人,并利用GSM网络实现对设备的远程控制;张传才等[15]研究人员采用BP神经网络建立了一种根据电机速度、运行时间确定机器人转角的测量方法,可以提供角度参数用于机器人的路径规划;王雪松等[16]研究人员基于改进的Elman神经网络逼近动力学不确定参数,利用神经-模糊控制器为煤矿机器人伺服系统发送控制指令;宋鑫等[17]研究人员将神经网络应用于机器人控制领域,完成机械臂多关节耦合控制、末端轨迹规划、液压阀控制等动作。
3.2 人工智能在煤矿机器人智能感知与险情预测中的应用
矿用巡检机器人通过搭载各类传感器实现全方位感知井下环境信息,实时监控仪器设备故障、人员安全及瓦斯、煤尘、水、火等灾害信息,并及时发出预警,减少煤矿事故的发生。针对井下复杂环境中的识别不准确、监测不及时等多个技术难题,研究人员使用深度学习、模式识别、专家系统等技术,进一步提升机器人对井下突发险情的精确识别与实时监控。
卢万杰等[18]研究人员使用基于卷积神经网络的深度学习算法,对煤矿设备进行建模和训练,使井下巡检机器人能够准确识别煤矿设备的类型;张帆等[19]研究人员针对井下噪声对可视化作业环境的扰动影响,提出基于残差神经网络的矿井图像重构方法,有效提高监控图像的清晰度及实时性能;聂珍等[20]研究人员采用基于BP神经网络的遗传算法搭建巷道气体环境智能检测系统,实时获取煤矿巡检机器人路径中不同巷道截面上气体浓度分布数据;潘越等[21]研究人员使用BP神经网络对风机故障建立诊断模型,建立风机故障类型与风机转子振动频率段之间的映射关系,进而实现风机故障诊断;闫君杰等[22]研究人员基于人工神经网络对煤矿机械齿轮故障建立诊断模型,使用输入信号训练神经网络模型,对输出信号进行分类,进而判断齿轮故障。
3.3 人工智能在煤矿机器人自主定位导航与地图构建中的应用
实现复杂非结构化煤矿环境中的自主定位导航既要考虑GPS技术无法直接应用于井下的问题,又要克服粉尘、温度、湿度、噪音、气流等外界因素的干扰,这对井下受限封闭环境中的机器人自主精准定位导航技术提出了更高的要求。基于人工智能技术进行煤矿机器人地图构建、定位导航、路径规划、实时避障成为应用研究热点。
白云[23]提出变结构模糊神经网络,并将其应用于蛇形井下救援机器人的环境感知过程中,将多源传感器数据进行融合,实现蛇形机器人在恶劣环境下的障碍物识别与环境建模;付华等[24]研究人员使用人工神经网络模型,将智能化煤矿监测系统的工作空间进行建模和动态描述,利用神经网络模型对机器人进行避障路径规划;张耀锋等[25]研究人员采用基于Elman网络对井下机器人超声波传感器测量误差进行补偿,大大提高了超声测距的精度和障碍物探测的能力;翟国栋等[26]研究人员总结了双目视觉技术在煤矿救援机器人中获取事故现场信息和实现自主避障及路径规划的研究,包括模式分类与识别、视觉测量和三维重建、组合测量与定位、视觉伺服控制等方面;马宏伟等[27]研究人员构建了基于深度相机的机器视觉系统,提出了一种基于深度视觉的导航方法,机器人搭载RGB-D深度相机进行数据采集,实现地图创建与自主导航。

4 煤矿机器人智能化研究
人工智能技术种类繁多,应用于煤矿机器人领域主要研究内容包括多模态融合智能感知、知识学习与智能决策、智能控制协同作业等。通过感知、学习、决策、协同控制,实现煤矿机器人智能化发展。
4.1 多模态融合智能感知
煤矿机器人通过搭载各类防爆、高精度、高可靠性传感器,构建视觉、听觉、嗅觉、触觉等多模态融合的智能感知系统,完成智能识别分析、异常声音识别、温度异常监测、烟雾检测、有害气体浓度检测、自主避障、自主抓持等作业。
(1) 研究煤矿应用场景下机器视觉识别、视觉检测等技术。
通过图像处理与理解,机器人一是能够识别和监控设备数字表、液晶屏、指示灯、阀门等;二是能够检测管路液体滴漏、胶带跑偏开裂;三是能够进行人员入侵、人员在岗、人员穿戴着装检测;四是能够对胶带上出现的矸石、锚杆、道木、铁管等异物进行识别与跟踪。
(2) 研究煤矿应用场景下机器人听觉即声音检测与识别等技术。
利用高灵敏度拾音传感器、高速DSP数字信号处理器,结合适应动态降噪处理技术、音频特征提取与检测模型算法识别技术,识别矿井内异常声音。
(3) 研究煤矿应用场景下机器人嗅觉即气体检测智能识别技术。
准确检测环境中的甲烷、硫化氢、一氧化碳、氧气等多种气体浓度和烟雾是否超限,及时发现气体泄漏和预警着火。
(4) 研究煤矿应用场景下机器人触觉技术。
通过接触或非接触的方式采集电机、水泵、轴承、托辊、胶带等物体温度,并进行数据分析;通过力感设备,对接触力、抓持力、作业力、内应力进行实时监控,实现力的感知与安全控制。
4.2 知识学习与智能决策
针对目前煤矿机器人系统协议不兼容、缺乏信息共享与融合等问题,将煤矿机器人与新一代信息技术深度融合,构建煤矿机器人相互学习和知识共享的泛化、标准、弹性系统,突破煤矿机器人场景理解、安全探测、精确定位、自主感知及高效导航等技术瓶颈。实现煤矿机器人共性技术的云端在线服务,解决个体机器人的局限性,提高煤矿机器人的智能决策水平。
(1) 建立个体与整体相融合的学习与泛化框架。
在个体层面,单台机器人在作业过程中,将传感、决策、控制、协作以及人机交互信息进行整合,通过以神经网络为代表的人工智能学习框架进行增量、实时、在线训练,对机器人的作业状态进行动态调整,实现全周期的最优化控制与决策。在整体层面,多机器人之间通过新一代信息技术,将自身学习的知识进行上传和分发,当某机器人面对全新作业任务时,可以借助其它机器人的知识结果,快速熟悉作业特性,减少重新学习时间,提升整体系统的任务弹性和适应能力。
(2) 建立机器人本体与云端相融合的作业模式。
突破传统机器人研发与集成模式,借助“5G+云计算”,实现本地轻量化机器人本体与云端高性能数据处理能力相融合的新型机器人研发集成路线。将智能环境感知、模式识别、地图构建、自主导航等需要强大计算能力的算法部分移入云端,本地机器人将机载传感器、执行器数据实时上传云端,通过云端强大的数据处理和计算能力,对感知、建模、执行等各个环节进行优化计算;计算结果实时下发本地机器人,减少了本地机器人的计算负担,将更多的硬件资源向传感器和执行端转移,实现轻量化、精简化、高效能的作业机器人设计。
4.3 智能控制协同作业
将深度学习、激光/视觉SLAM技术融入到煤矿机器人,再结合多模态融合的智能感知系统,实现煤矿机器人在矿井复杂环境下自主移动、精确定位、位姿调整、智能作业规划、自主作业以及灾害智能感知等功能,实现探测、掘进、支护作业过程智能协同控制。
(1) 将神经网络技术融入到多台煤矿机器人协同作业控制和规划中。矿井移动机器人自组织、自组网、自协调,实现异构设备整合。通过智能任务分解、任务分配、负载均衡技术,组建矿井复杂环境下的机器人群,应用井下空间自主导航、多传感器状态感知、智能作业规划、多机协同控制等技术,实现工作面掘进、钻探、采掘、运输、支护等多机器人间高效协同作业。
(2) 将人与单台机器人交互的模式扩展到人与多机器人群的交互,实现操作人员对机器人群的干预和协作。煤矿机器人作业过程中,各个不同功能的异构机器人形成复杂的多机器人协作群。同时,多机器人协作群需要能与操作人员进行深度的协作。通过AI技术,突破现有人机交互技术的简单的“指令-执行-显示”模式,将人的干预融入控制循环中,实现“人在环内”的融合人机交互新模式,实现“井下无人系统群+井上操作员”的作业模式,提升整体系统的作业效能、任务弹性和鲁棒性。
面向智慧煤矿目标,开展“煤矿机器人+”研究,“煤矿机器人+5G”实现全面感知互联、全域信息共享和多通道人机交互;“煤矿机器人+云计算”实现轻量低成本机器人本体和高效能学习计算能力的兼容;“煤矿机器人+大数据”实现动态预测、信息共融,为机器人进化学习提供数据基础;“煤矿机器人+AI”实现智能自主感知、最优分析决策和知识学习进化,从而形成矿山立体感知、自主学习、协同控制的完整智能系统。
5 未来展望
人工智能在煤矿机器人领域得到了广泛的应用,并取得了较多的研究成果。但是人工智能作为新兴的前沿技术,仍存在局限性。
(1) 目前的人工智能技术主要面向单一任务,尚未实现能够面对多种任务的通用型人工智能框架。例如针对图像识别训练的模型不能使用于声音检测和识别;识别某特定目标物的算法框架,也无法扩展到任意目标物的识别,在出现新的分类目标时,需要构建数据集并重新进行训练。该特点限制了人工智能在复杂任务场景下的应用。
(2) 人工智能算法需要依赖于大量的数据,而数据的采集、加工、标定和校准等操作需要人工完成,效率较低,如何使用更少量的数据,实现更高的性能,成为当前人工智能方法的研究热点之一。
(3) 煤矿机器人种类众多,存在大量的感知设备,驱动设备和执行设备。各设备的数据格式多样,难以形成统一的数据接口,使得各个系统之间的数据相互独立。不兼容数据导致人工智能系统难以将煤矿生产各环节的机器人进行统筹协调,也难以获取所需的足够数据,无法针对整个生产流程形成闭环式的统一规划。
(4) 煤矿机器人所处的环境极度危险,因此仅依靠目前的人工智能系统无法保证高度的安全性和稳定性。如何将人工智能系统与操作人员的人工干预相融合,并将人的干预融入整个人工智能系统的运行回环之中,成为下一步需要解决的重点内容之一。
未来,应用于煤矿机器人的人工智能系统将会朝着通用化、低开销、统一化和人机协作方向发展,出现面向多种任务的通用型人工智能算法框架,使用少量的数据和低成本的训练方法不断地在线学习和进化,能够结合煤矿生产各环节的关键数据进行统筹计算和调度,并能够和人类相互协同,实现高效、安全、自主的煤矿生产。
6 结语
随着人工智能技术的发展,煤矿行业将会迎来大变革。借助人工智能高效的模型构建、并行计算和统筹规划能力,煤矿机器人的智能化、自动化水平将会迈上新的台阶,真正实现煤矿生产的无人化和安全性要求。同时,人工智能将会使煤矿生产效率大幅提高,推动煤矿行业安全、健康和可持续发展。
参考文献
[1] 李芳玮,胡而已,张冬阳.煤矿机器人研发应用现状及趋势[J].中国煤炭,2019,45(7) :28-32.
[2] 孙晓彬.人工智能技术在工业生产中的应用探究[J].现代商贸工业,2019,40(23) :200.
[3] 陈芳.人工智能技术应用研究现状和发展前景[J].科技传播,2020,12(12) :130-131.
[4] 葛世荣,胡而己,裴文良.煤矿机器人体系及关键技术[J].煤炭学报,2020,45(1) :455-463.
[5] 孙召胤.物联网、人工智能在智能煤矿开采中的应用[J].建筑工程技术与设计,2020,(21) :4061.
[6] 仝维欣.人工智能对煤炭行业发展的影响[J].科技创新与应用,2020 (3) :50-51.
[7] 郑学召,童鑫,郭军,等.煤矿智能监测与预警技术研究现状与发展趋势[J].工矿自动化,2020,46(6) :35-40.
[8] 陈积梁.浅析煤矿综采工作面粉尘防治技术[J].内蒙古煤炭经济,2020(8) :111-113.
[9] 桂阿娟.物联网数据监测下露天煤矿开采环境污染模型研究[J].环境科学与管理,2020,45(6) :126-131.
[10] 姚轶峰.人工智能技术在机器人运动规划中的应用[J].信息记录材料,2019,20(12) :172-173.
[11] 朱铭明.人工智能在智能机器人系统中的应用研究[J].数字化用户,2018,24(29) :49.
[12] 赵英花.人工智能在智能机器人系统中的应用研究探讨[J].内燃机与配件,2018(18) :217-219.
[13] 陈海燕,徐翔,朱良.浅析人工智能在智能机器人领域中的研究与应用[J].现代信息科技,2019,3(10) :21-22.
[14] 王念,盛荣,郝宇浩.基于嵌入式ucos的智能矿井机器人设计[J].煤矿机械,2014,35(1) :19-21.
[15] 张传才,贺利乐,匡伟春.基于BP神经网络的机器人转角测量.煤矿机械,2008,29(4) :175-176.
[16] 王雪松.基于多传感器信息融合的煤矿机器人路径规划及控制的研究[D].2002.
[17] 宋鑫,边春娜.煤矿井下机器人钻臂智能控制研究.煤矿机械,2013,34(4) :55-57.
[18] 卢万杰,付华,赵洪瑞.基于深度学习算法的矿用巡检机器人设备识别[J].工程设计学报,2019,26(5) :527-533.
[19] 张帆,徐志超.基于残差神经网络的矿井图像重构方法[J].煤炭学报,2019,44(11) :3614-3624.
[20] 聂珍,马宏伟.煤矿巡检机器人巷道气体环境智能检测系统设计[J].工矿自动化,2020,46 (6):17-22.
[21] 潘越,陈尉,平建明,等.基于BP神经网络的煤矿风机故障诊断[J].煤矿机械,2013,34(2) :254-255.
[22] 闫君杰,苏晨.基于人工神经网络的煤矿机械齿轮故障诊断研究[J].煤炭技术,2017,36(9) :266-268.
[23] 白云.煤矿救援蛇形机器人环境建模方法研究[J].西安科技大学学报,2014,34(4) :485-489.
[24] 付华,杜晓坤,陈峰.基于Elman网络的超声测距补偿在煤矿机器人中的应用[J].煤炭学报,2005,30(6) :783-787.
[25] 张耀锋,陈宝玲,刘沂,等.基于人工神经网络的智能化煤矿监测系统的路径规划[J].传感器世界,2016(10) :31-33.
[26] 翟国栋,张文涛,岳中文,等.基于双目视觉技术的煤矿救援机器人研究进展[J].煤炭科学技术,2020,48(7) :206-217.
[27] 马宏伟,王岩,杨林.煤矿井下移动机器人深度视觉自主导航研究[J].煤炭学报,2020,45(6) :2193-2206.
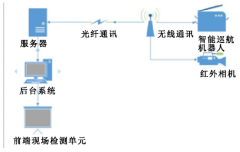
本文针对铜电解车间故障极板处理能力效率低、智能化不足等方面,详细介绍了一套智能巡航机器人系统,该系统在铜电解行业内首次正式工程性的采用了智能巡航、无线通讯、图像识别等一系列新兴智能技术,采用智能巡航机器人采集故障极板数据,大幅减轻人力负担,...

机械电子工程论文优选专业范文10篇之第五篇:人工智能技术应用到电子工程领域中的价值及应用方向探讨 摘要 :近年来,人工智能在各个领域都得到飞速发展,对社会发展产生了广泛而深远的积极影响。本文以电子工程领域对人工智能技术的应用为研究对象,通过概...
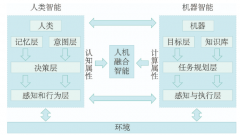
阐述了人机交互与人工智能的关系,介绍了人机融合智能的探索方法,即把人与机器有机融合在一起;分析了智能人机交互目前的标准进展;最后分析人机交互未来发展的重点方向是感知交互和急需解决的伦理问题。...

在以往的机械工程研究中,研究的内容主要包括制造工艺和动力研究两个方面,在制造工作研究上主要包括了机械零件的加工和装配,动力探究主要是对机械传动基本原理的研究。...

人工智能可以通过知识表示的方式对问题进行深入研究,并将其应用到实践问题的操作过程中,在机械设备的故障检测工作中,其能够通过故障树、专家系统、人工神经网络以及模糊数学等技术手段来开展相应的检测工作,探寻设备故障的根本原因,实现快速、精准的检测...