机械工程论文

1 可控机构应有的自由度
机构的自由度也就是指机构能够独立运动的个数,所以可控机构的自由度,一定是含有独立特性的一种参数,机构的原动件数等于机构的自由度数。一个机械能够实施的最大范围的独立变量是机构所具有的活动度,这只是相对于日常所见的衔接的机械而言。安设在机械设备上的串联机构,通过安装在机械末端的执行器,在相对于机械体系内所设置的机架,通过计算所得到的自由度,便是这一机构应有的自由度。同样,安装在机械设备上的并联机构,这种机械的自由度就等同于代动平台的应有自由度。根据我们已知的螺旋理论,通常把机械中并联机构所具有的自由度,当成螺旋系数的维度,并且这种维度也是螺旋系数所特有的,而螺旋预设的维数就是指机械架构所具有的活动度。在机械配件所拥有的架构内也有一定的自由度,其所拥有的自由度带有局部性的特点,并且不会影响到机械结构内的其他配件的功能,这是配件架构内的消极自由度。在机械构建中还存在着一些带有典型特性的自由度,一般存在与连接滚子的配件中,当然这种状况一般只会出现在平面机构中。但是在空间态势下存在的运动链,也会出现上述所说的带有典型性的自由度。在可控机构中会出现一些特有的约束,这种特有的冗余约束一般统称之为虚约束,之所以会出现这种所谓的虚约束,基本上是同机构常拥有的运动副有关,因为现在机械部件中所拥有的运动副,都是以前设计中已经设好了所需要的几何关联。所以,在可控机构中存在的一些约束,不会影响机构体系内存在的其他运动,对其他机械机构的运行不会产生其他作用,随着公共约束的消除,机构中所存在的螺旋数值,我们可以对此数值进行衡量,如果此数值大于机构原有的阶数,那么就说明机构中存在着冗余约束,另外所谓的过约束一般是包含了上述的冗余约束还包括机械的公共约束。
2 装载机构具有的可控特性
2.1 构型的预设
在机械中的装载机是连接着已经设计安装好的执行机构,在这个机构上一般会在上下两个方位安装限位块,这样的设计会限制机械动臂运动的灵活性,无法使动臂去在预设范围内发挥自有的功能。在此机构中,上方所安装的限位块主要功能是用于特定的几何限位,而下方所安装的限位块,主要功能是支撑机械的动臂,使机械能够顺利的翻转和复位。除了这两个限位块,在机构的动臂中,也设计安装有夹带着挡块的转轴,并且把具有一定规格的槽体安装在动臂的前侧,这样能够保证滑块能够持续的滑动,不会出现影响其他机构工作的现象。经过组装好的动臂及滑块,在经过机械中的连杆,进而与机械内的传动杆,相互连接在一起。在机械前侧的铲斗架,一直连接着机构中的动臂与铲斗,并在机构内的连动杆的作用下进行正常的工作。
2.2 常用的变胞途径
变胞原理就是采用特定方法,使机构的拓扑结构加以变化,以实现机构的自由度的变化。把能在瞬时使某些构件发生合并分离或出现几何奇异,并使机构有效构件数或自由度数发生变化。从而产生新构型的机构称为变胞机构。现在机构中通常用到的变胞途径,一般只要是有电磁变胞、有力变胞以及组合态势下的变胞组成。但是在现在的机械工程中,尤其是涵盖了多自由度系统的机械工程,出现了几何变胞这种新形式的变胞途径。一般而言就是把机构中的运动副,在设计的过程中便制定成具有特殊形状,用来满足机械的需求,具体而言就是在体系架构的上下方位增加限位块。变胞性能在机构中的实现是通过动臂连接着的相应转动轴,在所需要的情况下,收到这个区域所传来的信号即转动限制来实现的。
2.3 拓扑架构的细化
当设计好变胞构架并且制造出来之后,通过安装调试,使其能够在机构中正常的工作,在这里提到的新的装载构架是比较现代化的,具有一定的电动特性。通过对拓扑构架的重新设计和规划,可以在不同情况下用来代替原有的拓扑结构的工作。例如安装一台带有驱动功能的电动机,就可以更好的去翻转机器,并且提高液压装载机的工作效率,更好的卸去原料,使得机械构架工作效率更加显著。
电动机被安装在机架以上,而不是安装在平常使用的铰链处,通过这样的处理,不能够提升机构原有的体系刚性,另一方面也限制了机械构架的惯性。通过在矩阵的影响下,拓扑结构便很清晰的被描绘出来,进而可以明在不同时间段和工作状态下的拓扑结构的相互交替。在预先设计好的原理下所产生的机械架构,可以做到逐步代替原有的机械构架。在新的机械构架基础上,可以更好的明确装在机构的变胞特性,清晰了变胞生成以及发展的总过程,进而可以描绘出变胞机构的工作流程。这与生物学上的进化属性是基本上相同的。新的装载机构带有一定的变胞特性,其所使用的衔接特点相对于其他的装载机构是比较新颖的。当把自由度设置为零的时候,可以通过行对应的公式计算,得到新的变胞元。
3 运动学的范畴内建模
3.1 建模原理的本源
机构具有特定的运动学原理,主要是描述机构在运动中所产生的机构轨迹、设计建造时设定的加速度、机构特有的运动速率和位移、机构运行时产生的角速度、刚性部件在运动时的转动流程。通过这些机构所具有的特定本源,能够清晰识别机构所具有的受力特性、通过运算得出机构存在的误差、清楚的知道机构在运行中存在的奇异性,能够更好地在设计中预留出机构部件的工作空间,预设好机构的控制系统。在有机态势下将带有可控性质的挖掘机和装载机安装在一起的执行机构可以当成是一个机构的结合点。通常在平面范畴下的可控机构,基本上会带有三个层面的自由度。为了能够创造产生机构所特有的运动模型,需要引入闭环矢量这一概念,在此基础上预设好约束方程。机构在运动中产生的特定速率以及通过计算得出的机构部件加速度,都是对一阶方程及二阶方程产生特定的影响系数。通过对隐函数的运用,可以计算得出在理论上的时空边界,清晰描述出在理论态势下机构所能够达到的运动空间。在现在的机械理论中常用到的 D-H 参数法,可以在二维空间内建立相对应的运动模型,机构的平移运算一般都是通过机构部件的位移得到的,这样就可以清晰的得到机构的输出参数,还可以得到变量与变量之间的特有映射关系。
3.2 挖掘机构在三自由度架构的原理
现在通常将斜角坐标系和直角坐标系统称为笛卡尔坐标系。平面仿射坐标系是由相交于远点的两条数轴构成的。如果这两条数轴上所具有的度量单位是相等的,那么这个仿射坐标系便是笛卡尔坐标系。首先,在明晰了笛卡尔坐标系原理之后,在设计建造中就需要设定一个坐标原点,在水平态势下体现出来的延展方向就是笛卡尔坐标系的横轴,同样在竖直态势下所体现的延展方向就是笛卡尔坐标系的纵轴。为了更清晰的描绘笛卡尔坐标系,可以用 A 和 B 这两个英文字母代表横轴上的两个端点,在挖掘机上安装的铲斗部件,其所设定的输出点,被安装在铲斗的根部中点。可以用{E,F,R}来表示其特有的坐标位置,其中,E 代表了坐标系中的横轴,F 代表了坐标系的纵轴,R 代表了变径。因此可以把(a-R1)×2+(b-R1)×2=r×r当是五杆机构在笛卡尔坐标系中所特有的约束方程式。
具体事例而言,有一种轨迹可以被当成机械输出态势下所形成的轨迹,这种轨迹就是机构在运动中所产生的折线轨迹。在一般的机构体系中,通过设置三根特定的主动杆,使之与横轴形成设计好的夹角,可以涵盖 130°的原始角度。机构中主动杆在工作中所产生的角位移,会有一定的运动规律产生,可以通过计算得出,并可更替。
3.3 逆解方式的运用
在挖掘机中使用的可控机构是建立在三自由度的构架下,可以把衔接铲斗的机器构架当是一种在动静态势下所产生的平台。为了更好更明晰的去解释这种难度,可以把平台上所设定的三个点,在设计时便使其形成三角形的形状,当然在动平台上连接的这三个点也可以设计成三角形,这样就可以问题变得简单化。在机构中通过铲斗与机架的衔接,可以预先设定出几何中心,进而明确其所在的坐标系,当明确了机构的坐标系之后,就可以妥善的安装铲斗与机构的连接。一般情况下,机构中连杆所处的末端,就是建立坐标系的所在位置,通过连杆在工作中产生的关节轴线,是连杆在相对态势下产生的运动轴线,就是坐标系的纵轴。而轴线夹带产生的距离其实就是机构连杆的长度。轴线在相对势态下的转角其实也就是连杆在工作中产生的特有转角。根据右手定则的原理,在相对态势下的机械连杆产生的转角,就是机械关节部位特有的转角,通过计算得出的连杆偏距,清晰的明确了轴线特定的焦点,包含了机械的有向距离。在预先设定规划好机构的坐标系后,可以当是零的编号。在机构的设计开发中,支链所特有的笛卡尔坐标系,就是未能能够是机械构架中存在的动臂去替换原有存在的支链。在完成这一工作之后,通过相应的计算,就可以得出现有就够支链的 D-H 参数。可控机构在多自由度系统下的设计和开发,就是把机构中存在的支链以及运动副当成是机构体系中最重要的主动关节,并且所得出的 D-H参数是为了以后能够更好的对机构动臂的调节。
4 结束语
现代机械构架在多自由度系统理论的参与下,不仅仅涉及到原有的动力学说,并且还涉及到了电子领域以及其他的先进制造机理。使得在多自由度系统构架下的机械设计变得更加复杂,设计时充满着各种各样的疑难问题。通常来说,机械构建在设计时应该考虑的结构参数、部件与部件之间的尺度参数,这些都是设计师首先考虑的问题,做到最优化,使得机械原有的部件的受力特性得到充分的提升,并且不破坏机械本身具有的性能,所以在设计时不仅仅要考虑到机械实物的输入和输出特性,也要考虑到机械在工作中的真实状态,使设计出来的产品更加完美,确保使用着的需求得到满足。
参考文献:
[1]方雅。肘杆式伺服曲柄压力机动力学仿真与实验研究[D].广东工业大学,2011.
[2]王俊卿。混合驱动平面 3-RRR 机构的基础研究[D].中北大学,2011.
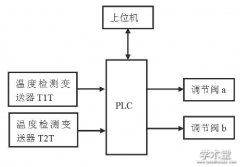
本设计利用PLC作为下位机;同时,采用MCGS通过上位机对系统运行状态进行监控,实现了良好的人机交互功能...

本论文介绍了家用电梯诞生的历史背景及电梯的发展史,分析了安全钳系统的工作原理、组成结构,以及各部件的作用,并通过对不同类型安全钳的比较,阐明了彼此异同,为安全钳的选型奠定了基础。...

在全球现代经济体系中,工业设计产业的巨大价值深刻地影响着当代工业乃至经济、文化、社会的发展。国内已有许多城市将发展设计产业作为立市之本,如北京提出创意设计产业塑造活力北京,深圳提出建设中国设计之都,无锡提出创立亚洲设计中心[1],等等。《厦门市人...
一种冲击摆的新型定位机构,其特征在于:在摆块的底面制有缺口,该缺口连通摆块内的弹孔,在冲击摆底座的顶面摆块的摆转侧的下方至上而下依次固定复写纸、记录纸。...