数字图像处理论文

铁路安全监测是列车安全运行的保障,采用视频监测技术的自动识别也是今后发展的趋势。而铁轨的自动识别是安全监测的关键.
在监测到的铁路图像,轨道表面亮度与相邻区域呈阶跃性变化,适合于边缘检测的分割技术。在提取到的边缘图像中,铁轨边缘和其他物体的边缘混淆在一起,利用直型铁轨的直线型特征,通过 Hough 变换提取到铁轨连续的直线边缘。
1 Hough 变换原理及实现方式
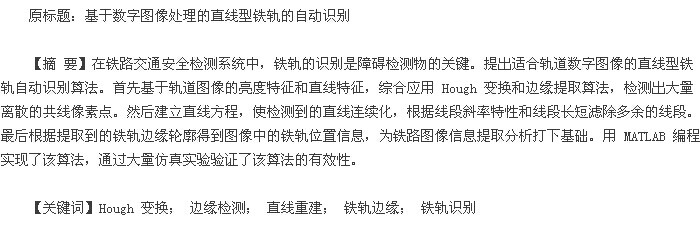
Hough 变换的思想是点-线的对偶性.在直角坐标系中的直线,映射到极坐标戏中就是一个点,这一点对应的角度和距离映射到直角坐标系中为直线的垂线与 X轴的角度 θ 和它的长度 ρ。其映射关系表达式为ρ = xcosθ + ysinθ ( 1)在算法实现过程中,图1 所示在同一条直线上的离散点,在对应的极坐标系中为连续的多条曲线,它们的交点对应的就是直线的参数。所以,程序设计的思想就是统计参数空间相交点的曲线个数。【图1】
2 边缘提取
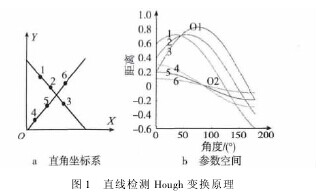
直线检测的前提就是对图像进行边缘提取。图像边缘检测的实质是采用某种算法求出图像中对象与背景间的交界线,图像灰度变化的情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获得边缘检测算子,经典的边缘检测算子有 Roberts 边缘检测算子、Sobel边缘检测算子、Prewitt边缘检测算子及 Canny边缘检测算子等,上面几种算子的边缘提取效果如图2 所示。【图2】
通过图 2 的比较分析可以得出边缘检测算子的特点:
1) Roberts 算子的边缘定位精度较高,但是很容易出现部分边缘的丢失。
2) Sobel 算子和 Prewitt 算子边缘定位较准确且比较连续,但是边缘容易出现多像素值的宽度。
3) Canny 算子效果最好,不仅边缘定位准确度高,而且边缘较细。
比较分析得出选取 Canny 算子作为铁轨边缘的提取算子效果会好些。
3 铁轨识别的 MATLAB 程序设计
1) 图像分割: 为了提高程序运算速度,将图片划分为几个块。本文将图像划分为大小基本相同的两块。虽然Hough 变换有多种改进算法,其识别时间和图像分块处理后的识别时间相差不大.
2) 图像灰度化处理: 提取到的现场图像为 RGB 图,为了降低图像的运算点数,所以图像必须对图像灰度化处理。
3) 图像边缘化提取: 由于 Canny 算子具有边缘定位准确度高、且边缘较细的特点,本文选取 Canny 算子为边缘提取算子。
4) 直线点提取: 这一步是算法的核心部分。图像边缘化处理后提取到的图片内的离散像素点之间能构成无数条在同一直线上的点,例如,每两个像素点之间就是一条直线。那么如何有效地提取到主直线的像素点就是程序设计的核心。
将参数空间划分为 m × n 个单元,设置累加器矩阵Zm ×n( i ,j) 和存储器矩阵Q( i ,j) ,其中m 和n 分别为参数空间长度 ρ 和角度 θ 的等分数,给累加器置初值0.扫描边缘提取到的二值图像,将其坐标( Xi,Yi) 代入 Hough 变换表达式中,求出相应的ρ值和θ值,在其对应的累加器中加1,即 Zm ×n( i ,j) = Zm ×n( i ,j) + 1,在遍历整个图像后,累加器中值较大空间对应在 Q 中的图像坐标点就是直线点集合的坐标点。
5) 直线方程构建: 上一步提取到构成直线的像素点的坐标集合是不连续的,运用最小二乘法将构成直线的像素点的集合拟合出直线方程,再根据直线方程构建出坐标连续的直线。
6) 直线的滤除: 铁路图像中,包括大量的直线信息,其中有枕木边缘构成的直线。但是枕木边缘直线和铁轨边缘直线斜率相差较大,通过直线斜率的选取能够有效提取到铁轨边缘。
7) 铁轨的提取: 每条铁轨都有 2 个边缘,铁轨就夹在2 个边缘直线之间。通过检测到的直线提取得到铁轨。
8) 图像的合成: 将分块处理的图像检测到的钢轨融合在一起。
4 实验结果及分析
本文以 Pentium IV 2. 0 GHz 计算机为硬件,以 MAT-LAB7. 0 作为软件开发工具按照上面步骤设计算法程序。以677 ×538 像素的铁路 RGB 图为例,对算法进行测试验证。
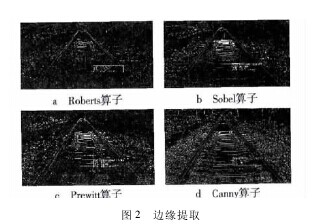
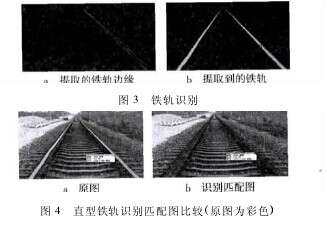
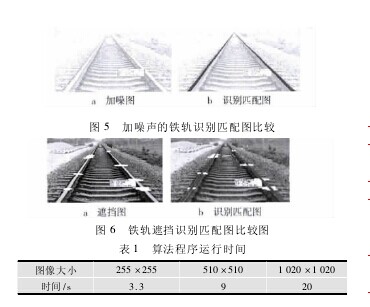
由图3 可以看出将边缘提取到的不连续的铁轨边缘变为连续的铁轨边缘,同时滤除了其他物体的边缘,随着图像深度的加大,铁轨之间的像素点数目也进一步缩小,直至最后相交。图4 是提取到的铁轨和原来图像中铁轨位置的比较,可以看出铁轨轨面上几乎所有的像素点都提取到了,且识别的铁轨和原来铁轨位置很好地吻合,图中红色区域为识别到的铁轨。图 5、图 6 为图像加噪和遮挡后的识别效果图,表明图像加噪、遮挡后依然能够准确地识别。表1 为算法程序处理不同像素值图像的时间,在像素不高的情况下,识别时间比较快,但当像素成倍增加时,时间却以更高倍数增加,这也是为什么要对图像分块处理的原因。【图3-6.表1】
5.结论
本文创新点是在充分结合边缘检测算法和 Hough 直线提取算法特点的基础上,对提取到的离散点进行直线方程的拟合构建,提出一个适合铁路直轨识别的算法,通过以上仿真实验,验证了本文算法对直线型铁轨识别准确度高,提取到的铁轨能和原来图中的铁轨完全对应。同时,本文算法对掩埋在噪声图像中的铁轨以及部分铁轨的部分遮挡同样能够正确识别。本文虽然对图像进行分割处理,但是自动识别时间还是相对较长,而进一步的分割会影响提取铁轨的准确度。以后的工作研究对铁路弯轨的自动识别,从而真正实现基于图像的铁轨识别。
参考文献:
[1] 任重。 基于先验知识的铁轨识别[D]. 武汉: 武汉理工大学,2007.
[2] DUDA R O,HART P E. Use of the Hough transformation to detect lines andcurves in pictures[J]. Communications of the ACM,1972,15( 1) : 11-15.
[3] 贺新华,周媛媛。 MATLAB7. X[M]. 北京: 人民邮电出版社,2006.
[4] ASSIDIQ A,OKHALIFA O,ISLAM R,et al. Real time lane detection forautonomous vehicles[C]/ / Proc. International Conference on Computerand Communication Engineering. [S. l. ]: IEEE Press,2008: 82-88.
[5] 谢昭莉,王壬。 基于图像识别的井下机车轨道检测方法[J]. 计算机工程,2012,38( 14) :147-149.
[6] 兰培强,陈维荣。 铁路道口智能视频监控系统软件设计[J]. 计算机应用与软件,2008,25( 5) :191-192.
[7] 陈彦燕,王元庆。 常用边缘检测算法的定量比较[J]. 计算机工程,2008,34( 17) : 202-204.
[8] 陈仁杰,刘利刚。 图像主特征直线的检测算法[J]. 中国图象图形学报,2010,15( 3) :403-408.

前言数字图像处理技术以当前数字化发展为基础,逐渐衍生出的一项网络处理技术,数字图像处理技术可实现对画面更加真实的展示。在医学中,随着数字图像处理技术的渗透,数字图像将相关的病症呈现出来,并通过处理技术对画面上相关数据进行处理,这种医...
0引言随着铁路运输的不断发展和我国铁路中长期发展规划和战略的实施,铁路运输在国民经济生活中的重要性逐渐凸显。于此背景下一些铁路相关技术亟需改进。相较于传统的火车识别,本文从机器视觉和图像处理等技术为出发点提出一种区别于以往的基于数字图像...
人类的视觉是有限的,人眼可见光谱范围是390nm-780nm,而数字图像处理设备可以覆盖全部的电磁波谱,所以需要通过这个载体来实现图像处理。但是基于考虑到图像的传输方式以及带宽的限制,存储方式以及所带来的图像失真问题,我们必须对采集来的原始图像进行加...
思维导图由着名教育学家托尼博赞于20世纪60年代首创而成。作为一种有效的创造性思维工具,它已经被广泛应用在个人的自我分析和问题解决,家庭和商业的各种计划,甚至企业的员工培训和经验管理等方面[1].特别的,教育界也通过研究和挖掘思维导图的潜在教...
不论在哪种通讯手段中,人们都更愿意选择直观的图像表达,因此,未来社会对图像传递信息的要求越来越高,及时性、直观性、客观性等发展条件都对现有的数字图像处理技术提出了挑战。1数字图像处理技术概述数字图像处理是论述数字图像处理的基本理论、方...
近年来,数字射线成像检测技术发展迅速,它具有成像速度快、检测效率高的突出优点。通过有效的质量控制措施,可望实现无胶片射线检测,有效代替胶片的使用。数字射线成像技术已在国内多个行业领域内获得广泛应用,但面临的问题是缺少相应标准的支撑。国际标准化组...
数字图像在获...
0引言SMT检测技术在现代生产过程中的应用非常的广泛,特别是随着科学技术的不断发展,SMT数字图像处理技术的应用不仅在很大程度上减轻了人们的工作力度,同时还使得相应的检测具有了更高的精度,这在很大程度上提高了企业的生产质量和生产效率。下面主要从...
0引言计算机技术的发展促进了多媒体技术的迅速发展和普及,图像处理技术作为一种实用工具,已经在众多领域中得到广泛应用。在腐蚀科学与工程领域,较为熟知的图像有实验室内拍摄的金属金相组织照片、金属断口照片、扫描电镜照片、光学显微镜照片、材料的直...
数字图像处理技术在纺织检测中的应用极大提升了检测效率,且不会对检测样本产生损害,检测效果精确,检测成本能够得到有效控制。数字化图像处理技术应用于当前纺织检测中已经成为一个主要发展趋势,实际取得效果是非常突出的。...