����ͼ��������

����0 ����
����������ᾭ�õIJ��Ϸ�չ����ռ佨����������̳�����ӰԺ���������ġ�����ݡ�չ�����Լ������ֿ�ȣ� Խ��Խ�࣬��������������������ʮ����Ҫ�����á���ռ佨�����е���ټܸߡ���ȴṹ���ӵ��ص㣬һ����������ʱ�����ڽ����ڿռ�ϴ��ַ���ʱ�������������ڸÿռ��ϴ������ٶȺͷ�Χ���������ܵ��������ص�Ӱ�죬���ѵ��ィ��������ֻ�е����ַ���һ����ʱ��ʹﵽһ���ij̶�ʱ����װ���䶥���ĸ��¡�����̽�����ſ���̽�����˴�ͳ�Ļ���̽�⼼������ʵ�ֶԴ�ռ佨�����ֵ����ڼ�ء�Ԥ����
����
����ͼ���ͻ���̽�⼼���������ͼ����������ģʽʶ���������������������������Ƚ�������һ�壬���зǽӴ�ʽ̽�⡢��Ӧ�ٶȿ졢�����ȸߡ���ⷶΧ������������ܿռ�߶ȡ������ٶȡ����ϡ��ױ����ж��Ȼ������������ƣ��ܶ����ڻ��ּ�ʱȷ�������жϣ��Ӷ�ʵ������Ԥ������ص�Ŀ�ġ�����ͼ��Ļ���̽�⼼���ѳ�Ϊ��ռ估�������̽�����Ч�ֶ�[1].
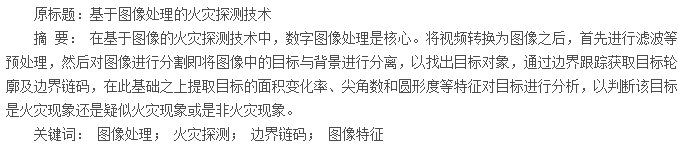
����1 ͼ���ͻ���̽�⼼������ԭ��
����ͼ 1 �ǻ���ͼ�����Ļ���̽��ϵͳ��ͼ��ϵͳͨ�����к����˹�Ƭ������ͷʵʱ�ɼ��ֳ�ͼ���ڽ����˲���Ԥ�����������ñ�����ַ���ȡĿ��ͼ���ѵ�ǰ�ɼ���ͼ����洢�ı���ͼ����в�����㣬�Ƚϲ�ֽ����Ԥ�ȸ�����ֵ�Ĵ�С�������ֽ������ֵС����˵�����쳣������֣���֮�������һ���жϣ�ͨ�������ɼ� 5 ֡�ֳ�ͼ�ֱ��뱳�����в�����㣬��ȡ��ֽ����ƽ��ֵ���ٴ�����ֵ���бȽϣ��������ֵС����ֹͣ��Ⲣ���б���ͼ��ĸ��£���������ж��л��ֳ��֡����ֻ��ֺ�ͼ����зָ����ȡĿ������ͨ������˲��ķ�ʽ�������������С��Ŀ����Ϊ�����˳�����ȷ��������Ŀ��ͼ��Ȼ��ͨ���߽���ٻ�ȡĿ���������߽����룬�ڴ˻���֮����ȡĿ�������仯�ʡ����������Ե������������Բ�ζȵ�����ʵ�ֻ��ֵ��Զ�ʶ��[2].
����
����2 ���ڻ��ֵ�ͼ��ʶ��
��������ͼ�����Ļ���̽�⼼������Ҫ�����û��ֵ�һЩ�Ӿ����������жϡ������ڻ��ַ������ڣ�����Ӳ�������չ��Ҫ����һ�����̣����ʹ����������γ��ֵ������������ԣ�������ʱ��ı仯������Ĵ�С����״�Լ�����ļ���������������ڱ仯�ģ���ˣ�ֻҪ��Ƴ��㷨�ܹ������ı�������Щ���������ܹ�ʵ�����ڻ��ֵ�̽��[3].
����2. 1 �߽������������ȡ
�����߽�����ͨ�������ض�������ض����ȵ�ֱ�߶�����ʵ�ֶԱ߽����룬ֱ�߶εķ���̶�������Ŀ���ޣ��ڱ߽�������Ҫȷ����ʼ������꣬�������������������������ƫ������ʾ������ÿ����ֻ��һ����������ʾ�����ɴ����������������꣬��ˣ��������ʾ�߽��ɴ�������������ͼ 2Ϊ 8 �������뷽��ͼ��Ϊ�˷�����ȡ��������ֵ���ڶԶ�ֵͼ����зָ��һ����������ͬ�����Ŀ����б߽���٣���ȡĿ��������������ĸ��ٿ�������ķ�����У���һ���ٵ��ȡ����������һ�����㣬�Ӷ������˶��������ص��ɨ�裬�������������ٵ�Ч�ʡ�
����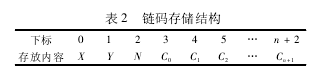
���������У�Ϊ�˻�����ڱ߽�������ֵ��������Ҫ֪�����ڵ�����꣬��ɸ��ݱ߽�����ֵ�������ĵ�����������Ӧ��ƫ�����õ����������ͼ������ԭ���������Ͻǣ�X �᷽�����ң�Y �᷽������ʱ���ĵ������ڵ��ƫ������� 1 ��ʾ��
����
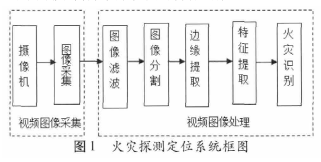
��������洢��һά�����У�����������Ҫ�洢�߽���ʼ���λ�����꣬��ˣ������п�ʼ��������Ԫ�洢������꣬����һ����Ԫ�洢��������Ȼ��洢�������У�����Ĵ洢�ṹ��� 2 ��ʾ��
������ȡ�߽�����Ĺ�����Ҫ�ǣ� ��1�� ���մ����ң����ϵ��µ�˳������ɨ��ָ���Ŀ������ͼ��ͨ���Ҷ�ֵ�ж��Ƿ��DZ߽�㣬����ǣ��������Ϊ��ʼ��ͬʱ��¼�õ����꣬��Ѱ���������ڵ���һ���߽�㣻 ������ǣ��������ɨ��˳��Ѱ�ұ߽���ʼ�㡣��2�� �ѵ�ǰ�ı߽����Ϊ���ģ�������ǰһ������ֵȷ����һ���߽��ļ�ⷽ���������ֵΪ������������ֵ�� 2 ��Ϊ��ǰ�߽��ļ��ij�ʼ���� ���Ϊż����������ֵ�� 1.����ȷ����ⷽ��Ĺ�����˳ʱ��ķ�ʽ��������ĵ����ڵ� 8 ����������� 8 ���������ҵ��µı߽�㣬�������ֵ���浽�����У� ���û���ҵ����ڵı߽�㣬��˵����ǰ���ĵ�Ϊ�����ĵ㣬����洢����3�� �������ٻص��߽���ʼ�㣬�γ�һ���պϵı߽��ߣ����ٽ�����
����2. 2 ����ͼ��̽������
���������õ�����Ҫ�����У� Բ�ζȡ�����仯�ʺͼ����[4 -5].����ֵ��ȡ������ͼ 3 ��ʾ��
����2. 2. 1 ��״����
�������ڻ������״�������������ָ���Դ����״�����̶Ƚϸߣ���ϵͳ����״������Ϊ��һ���ж����ݣ���ʽ��1�� ��ʾ������Բ�ζ���һ���̶��Ͽ������ֳ�Ŀ����״�����̶ȣ���ˣ�������Ϊ��״��������������
����
����ʽ�У�ρ ΪԲ�ζȣ� C Ϊ�ܳ������߽糤�ȣ��ɴӱ߽������еõ����ڱ�̹����У�����������ż����������������߶γ��Ȳ�һ������ˣ���Ҫ�ֱ���㣬��������������������Ԙ�2����ż���������������ӣ������Եõ�Ŀ��������ܳ��� S Ϊ�����ͨ��ͳ��ͼԪ����������á���Ŀ��߽�ΪԲ��ʱ����Բ�ζ�Ϊ��Сֵ 1,Ŀ��߽�ĸ��ӳ̶�Խ�ߣ���Բ�ζȵ�ֵԽ��

ǰ������ͼ���������Ե�ǰ���ֻ���չΪ����������������һ�����紦������������ͼ����������ʵ�ֶԻ��������ʵ��չʾ����ҽѧ�У���������ͼ������������������ͼ����صIJ�֢���ֳ�������ͨ�����������Ի�����������ݽ��д���������ҽ...
0����������·����IJ��Ϸ�չ���ҹ���·�г��ڷ�չ�滮��ս�Ե�ʵʩ����·�����ڹ��������е���Ҫ�����ԡ��ڴ˱�����һЩ��·��ؼ���ؽ��Ľ�������ڴ�ͳ�Ļ�ʶ�𣬱��Ĵӻ����Ӿ���ͼ�����ȼ���Ϊ���������һ�������������Ļ�������ͼ��...
���ſ�ѧ�����Ľ���,Խ��Խ��ĸ��¼�����Ӧ���������ǵ����������,�����ƶ��ִ���ᷢչ��ͬʱ,Ҳ�����ǵ�����,���ʽ�����˺ܴ�ĸı�,�ر�������ʶ�����Լ���Ƶ���������ķ�չ��Ӧ��,������ִ����ķ�չ������Ϊ��Զ��Ӱ�졣����������������ͼ��...
����ʱ���Ľ���������������̶�Ҳ������ߣ��Ժܶ����������µ�Ҫ��Ϳ�������һ����������ͼ���Ͼ��Ƕ�ͼ������������ſ�ѧ�����IJ��Ϸ�չ�����������Ҳ�ڲ��ϵĸı䡣��������˼���ת���뼼���ķ�չ�����Ƕ�ͼ���Ҫ��Խ��Խ�ߣ����Ӧ�ý�ͼ����...
����ͼ�������о����ݡ�ϵͳ���ɼ�Ӧ��ǰ��
������Ӿ������ģ����ۿɼ�����Χ��390nm-780nm,������ͼ�����豸���Ը���ȫ���ĵ�Ų��ף�������Ҫͨ�����������ʵ��ͼ���������ǻ��ڿ��ǵ�ͼ��Ĵ��䷽ʽ�Լ����������ƣ��洢��ʽ�Լ���������ͼ��ʧ�����⣬���DZ���Բɼ�����ԭʼͼ����м�...
˼ά��ͼ����������ѧ�����Ჩ����20����60����״����ɡ���Ϊһ����Ч�Ĵ�����˼ά���ߣ����Ѿ����㷺Ӧ���ڸ��˵����ҷ���������������ͥ����ҵ�ĸ��ּƻ���������ҵ��Ա����ѵ�;�������ȷ���[1].�ر�ģ�������Ҳͨ���о����ھ�˼ά��ͼ��DZ�ڽ�...
����������ͨѶ�ֶ��У����Ƕ���Ը��ѡ��ֱ�۵�ͼ������ˣ�δ������ͼ����Ϣ��Ҫ��Խ��Խ�ߣ���ʱ�ԡ�ֱ���ԡ����Եȷ�չ�����������е�����ͼ���������������ս��1����ͼ����������������ͼ��������������ͼ�����Ļ������ۡ���...

�����ý����ҵ�����м���չ��ͨ������������Լ�ͼ��ͼ�������������룬���Էḻͼ���Ӿ��������ʶЧ����������Ϣ����ȫ������֣����������ҵ�ij�����չ����...
�������߳�����ԭʼͼ�����ݵĸ����뱣��
������,�������߳����⼼����չѸ��,�����г����ٶȿ졢���Ч�ʸߵ�ͻ���ŵ㡣ͨ����Ч���������ƴ�ʩ,����ʵ����Ƭ�����,��Ч���潺Ƭ��ʹ�á��������߳��������ڹ��ڶ����ҵ�����ڻ�ù㷺Ӧ��,�����ٵ�������ȱ����Ӧ����֧�š����ʱ�����...
����ͼ���ڻ�...