农业机械化论文

0、 引言
水稻机械化种植技术是一项先进的农业技术,能够大幅提高水稻综合生产能力,是水稻现代化种植的发展方向,也是未来水稻种植的主导性技术。水稻插秧机是一个由多部件组成的复杂机械系统,分插机构是插秧机从秧群中分取一定数量的秧苗并插入土中的机构,是插秧机的主要工作部件,其性能决定插秧质量、工作可靠性和插秧频率。由于要通过秧针的非匀速转动来实现不同插秧动作(取秧、送秧、推秧、回程等) 对速度的不同要求,达到秧苗插直、插深、插稳、不伤苗等插秧农艺要求,因此对分插机构的研究成为国内外水稻插秧机的研究重点。椭圆齿轮是节曲线封闭的非圆齿轮,当用两个相同的椭圆齿轮传动时,随着椭圆偏心率的不同,可得到不同的传动比变化曲线,以完成机构的变速传动或作为速度和加速度调节之用。椭圆齿轮分插机构可以满足秧针的非匀速转动,并在理论与实践中得到验证,广泛应用于国内外高速水稻插秧机。
为使分插机构高效运转,保证秧苗的直立性,对椭圆齿轮的参数有严格限定。根据插秧农艺要求,秧针尖点的 Y 方向位移变化量在 260 ~ 310mm 之间为宜。但通过 ADAMS 对分插机构进行运动学仿真,从结果可以很直观地看到: 对于确定参数,轴心在焦点的椭圆齿轮分插机构不能满足秧针的轨迹和姿态要求。针对这个问题,根据赵匀等的研究,调整变形椭圆齿轮的偏心率,可以使传动比实现纵向变化,增大传动比可调空间,更有利保证秧苗的直立性。结合一般椭圆齿轮和变形椭圆齿轮的特点,以逆向思维的方法,在不改变椭圆齿轮齿廓参数的条件下,通过调整椭圆齿轮的轴心位置对分插机构进行改进,使秧针的轨迹和姿态满足插秧机的工作要求。
1、 椭圆齿轮传动理论
图 1 为一对初始相位相同、相互啮合的椭圆齿轮。齿轮Ⅰ、Ⅱ分别绕焦点 O1、O2转动,F1、F2分为椭圆齿轮Ⅰ、Ⅱ的另两个焦点,主动齿轮Ⅰ带动从动齿轮Ⅱ做非匀速转动。图 1(a) 为两椭圆齿轮的初始安装位置,轴心距 L = 2a (a 为椭圆的长半轴长) ,轴心连线上的 M 点为两齿轮的初始啮合点,P1、P2分别为

到两焦点的距离之和为常数 2a ,则 Li= 2a 。因此,椭圆齿轮在任意啮合位置时,都能保证两齿轮在节曲线上的准确啮合,没有齿侧间隙,也不会产生轮齿挤压,具有传动平稳的优点。
2、 椭圆齿轮分插机构模型的建立
椭圆齿轮的节曲线为椭圆,齿形与圆齿轮一样都是渐开线齿形。根据齿形折算法,利用 CAXA 电子图版的曲线绘制功能完成椭圆齿轮的草绘模型,结合UG 三维造型功能完成椭圆齿轮分插机构的建模和装配。表 1、表 2 为长半轴 a = 21. 525mm、短半轴 b= 20. 725mm、齿数 z = 20,压力角 a = 20°的 1 /4 节椭圆齿廓参数。图 2 为椭圆齿轮安装示意图,图 3 为分插机构总装图。

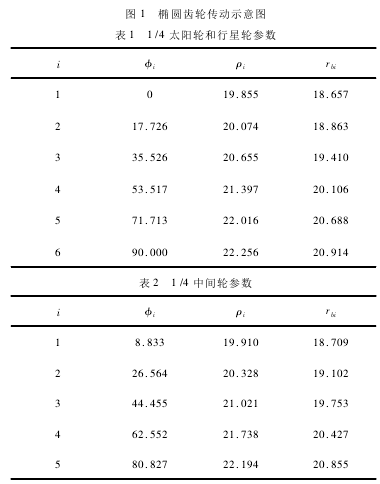
图 3 中,椭圆齿轮分插机构旋转 1 周插秧两次,太阳轮与回转箱固连,回转箱逆时针转动带动中间轮与行星轮非匀速转动,插植臂跟随行星轮转动。推秧弹簧通过凸轮机构压缩和释放: 在压缩过程中取秧,当运动到凸轮缺口处瞬间释放能量,驱动推秧杆将秧苗从秧爪上插入泥土中,完成整个插秧过程。
3 分插机构的 ADAMS 虚拟样机动态仿真
在 UG 中简化模型,导入 ADAMS 并设置零件属性,约束关系和载荷类型。由于椭圆齿轮啮合时公共速度标记点在不断变化,所以无法通过直接添加齿轮副来定义两个椭圆齿轮之间的运动,在这里根据零件的材料及润滑条件,通过定义接触力的方式来实现运动的传递。
3. 1 机构的运动学仿真
合理的秧针轨迹是保证插秧质量的关键,秧针尖点的位移、速度、加速度是准确取秧和插秧的重要保证,也是运动学研究的重要参数。应用 ADAMS 软件的轨迹跟踪和测量功能,设置仿真参数 End Time =1S,Step = 1 000。绘制秧针尖点的静轨迹曲线(如图 4所示) ,通过测量获得秧针尖点的位移、速度、加速度特性曲线(如图 5 所示) ,以便及时发现设计中存在的问题。

3. 2 仿真分析
速度和加速度可以反映系统运动的平稳性:速度的波动容易引起振动使机构工作的平稳性下降,加速度的变化能反映出机构的动力学特性。根据张敏等的研究,当椭圆齿轮参数合理时,轴心在焦点的椭圆齿轮分插机构能够满足插秧农艺要求。但由于椭圆齿轮参数的变化,结合图 5 分析,秧针尖点 X轴方向的速度值变化范围大约为-0. 9 ~0. 9m/s,Y 轴方向为-1. 5 ~2. 7m/s,波动是插植臂刚插完秧苗、快速回位的一种表现; 加速度曲线在插秧瞬间的阶跃比较大,会降低机构的使用寿命和工作可靠性; 秧针尖点在 X 方向的位移变化量为 225mm,Y 方向位移变化量为 450mm,不符合插秧农艺要求的 260 ~ 310mm 的要求。

4、 椭圆齿轮分插机构的改进
为了提高插秧机工作的平稳性和可靠性,满足插秧农艺要求,对椭圆齿轮分插机构进行改进。根据张玮炜椭圆齿轮偏心率的变化对秧针尖点运动轨迹影响的研究,结合变形椭圆齿轮理论和逆向思维设计,在椭圆齿轮齿廓参数不变的情况下,通过调整椭圆齿轮的轴心位置对分插机构加以改进。其中,太阳轮的轴心沿几何中心向左 2. 5mm,向下 0. 5mm; 中间轮向上 2. 5mm,向右 0. 5mm; 行星轮向右 2. 5mm,向上 0. 5mm。为便于安装,用圆形和方槽形作为相位标记点。图 6 为改进后的椭圆齿轮模型图和装配图,图7、图 8 分别为改进后的秧针尖点轨迹图和运动学曲线图。

结合图 7 和图 8,通过对比可以看出: 改进后的分插机构更能保证垂直插秧,秧针尖点速度曲线比较平缓,X 方向为-0. 5 ~ 0. 5m/s,Y 方向为-1 ~ 1m/s,0. 3~ 0. 6s 范围内速度变化明显比较平稳; 加速度整体波动比较小; 秧针尖点 X 方向位移变化量为 155mm,且均为负,Y 方向为 300mm,满足农艺要求。

5、 结语
利用 UG 建立分插机构的三维模型,通过动力学仿真软件 ADAMS 对齿廓参数相同、轴心位置不同的两种椭圆齿轮分插机构进行仿真。通过对比改进前后秧针尖点的位移、速度、加速度曲线和轨迹可以看出: 改进后的分插机构能够更好地实现“腰子形”轨迹和变传动比的平稳快速垂直插秧,符合插秧农艺要求。
同时,改进后的椭圆齿轮啮合时,中心距由 43. 05mm减小为 42. 25mm,使分插机构的整体尺寸减小,提高了机构的动力学性能,为高速化和轻型化的插秧机设计提供了依据。
参考文献:
[1] 张俊宁,张小超,李颉,等. 高速插秧机横向仿形插深自适应系统的开发[J]. 农机化研究,2012,34(9) : 69-72.
[2] 陈建能,赵匀. 高速插秧机椭圆齿轮行星系分插机构的参数优化[J]. 农业机械学报,2003,34(5) : 23-27.
[3] 陈建能,赵匀. 水稻插秧机分插机构的研究进展[J]. 农业工程学报,2003,19(2) : 46-49.
[4] 尹建军,赵匀,张际先. 水稻插秧机分插机构的创新设计[J]. 江苏理工大学学报,2001,22(5) : 5-7.
[5] 罗敏峰. 基于 Pro/E 椭圆齿轮的参数化建模[J]. 机电技术,2008(2) : 4-7.
[6] 赵匀,黄巨明,张国凤,等. 变形椭圆齿轮分插机构运动分析与优化[J]. 农业机械学报,2011,42(4) : 48-52.
[7] 王大明. 正圆偏心齿轮传动与椭圆齿轮传动之比较[J].产业用纺织品,1998,16(95) : 21-22.
[8] 俞高红. 圆柱齿椭圆齿轮行星系分插机构的动力学分析与优化[D]. 杭州: 浙江大学,2006.
[9] 张布,赵凤芹,于文翠,等. 新型高速分插机构椭圆齿轮传动的仿真分析[J]. 农机化研究,2008(6) : 21-23.
[10] 韩继光,王贵成. 偏心渐开线齿轮传动计算方法分析[J]. 机械设计与研究,2004,20(5) : 42-43.

引言花生作物是国家最重要的农业作物之一,在我国华东地区、东北地区、四川盆地以及江浙一带都长期保有大量的花生的种植面积。自2007年以来,我国的花生出口量达世界首位,同时花生也是食用油的主要粮食来源。因此,对花生作物的种植、保养和收割采集方面...
引言我国辣椒的总产量居世界之首,年产量达2800万t多,约为世界辣椒产量的46%,同时每年还以9%的速度增长,辣椒去核是辣椒进行深加工前的一个重要工序,目前国内辣椒产品的加工大多采用手工去核,费工又费时。个别企业开始使用一种辊子式的辣椒去核...
0引言为解决人工移栽费工费时、生产效率低、难以实现大面积作业的弊端,研发全自动移栽机以替代传统作业方式将成为趋势[1].现有的移栽机基本为半自动化的栽植机械,另需配套人工完成喂苗[2];当人工劳作遇到大面积作业时,必会产生烦躁情绪,从而影响作业质量...