ũҵ��е������

����0 ����
����Ϊ����˹����Էѹ���ʱ������Ч�ʵ͡�����ʵ�ִ������ҵ�ı�,�з�ȫ�Զ����Ի��������ͳ��ҵ��ʽ����Ϊ����[1].���е����Ի�����Ϊ���Զ�������ֲ��е,���������˹����ι��[2]; ���˹����������������ҵʱ,�ػ������������,�Ӷ�Ӱ����ҵ������Ч��.Ϊ��,�����һ���ܴ�Ѩ�̸��н�Ѩ�����ȡ����������ЧͶ�ŵ�ִ�л���,��������������������ģ�ͽ����˶��������,ͬʱͨ������������֤�˸���ƵĿ�����.
����1 ȡ�����
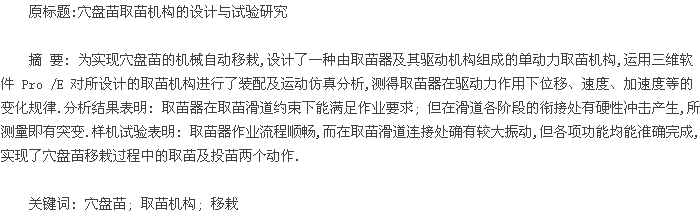
����ȡ�����[3 -5]�ǽ�Ѩ�����粧�����ȡ��Ѩ�������ͷ�����ֲ�����Ĺ�������,��ȡ���������������������.����ʱ,ȡ������������Ѩ��ֱ�����粧��Ӵ����м�ȡ��Ͷ��.Ϊ��֤ȡ������һ����λ����ɶ���ȡ�硢�������ͺ�ȷͶ�綯��,���˶��켣����̬������к����滮.ͼ 1 ��ʾ�� 5 �������ǹ켣�滮�Ĺؼ�: ��A ������.��ȡ�����ƶ����õ�ʱ,���뽫Ѩ����Ͷ���뼴λ����ֲ����,�õ�������Ҫ����ʵ��Ѩ���������[6]Ͷ��.��B1ΪѨ���綥��,һ��ȡѨ�����ƽ���߶�.��B ΪѨ�̱����.��C ΪѨ�̵ײ���.ȡ��켣����ȡ���������粧���岢�г��粧���뾭��Ѩ�̱���� B,���Դ�ֱ��Ѩ�̱����ֱ�����ֱ�߹켣��� C( Ѩ�̵ײ�) ���,���켣����Ȼ���ܳ����� C,��������Ѩ�̽��ᱻͱ������ƻ���Ӱ���������������.��O Ϊ�����г���ֹ��.�г�ס�粧��,ȡ�����и����ζ���,ʵ�ֽ��粧����Ѩ��Ѩ��,�����г���ֹ�� O ��Ϊ��֤ȡ������Ѩ������ȫ��Ѩ���аγ���̶�ת�����,�ɴ˿ɵ�ȡ����������ƾ��� B1O ������ڵ��ھ��� BC.
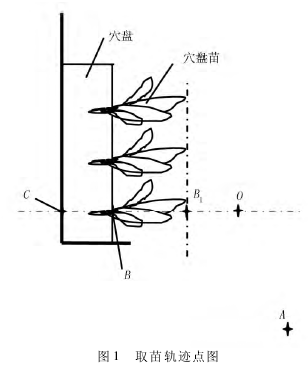
����Ϊ����ȡ��켣����̬Ҫ��,�������ͼ 2 ��ʾ��ȡ�����.����,ȡ������������ȡ�绬�롢�������ȡ����ܡ�ȡ�絯�ɺ�ȡ��˵����[7 -8].�������ڰ�װȡ�绬�������ܻ���,ȡ����ܰ�װ���������,ȡ�絯�����������������֮��.����������Ҫ����ȡ�绬��Ͱڶ����˻������,ȡ����������װ�ڰڶ�������,��������̶�,������������ȡ�絯�ɵ�������ͬ��������,���ɵ�������ȡ�绬���"��"���λ���( ABCDEA) ����,ʵ��ȡ�绬�������������ܵĶ���.����,ȡ������ȡ�绬���ܵ�F �����ú�,�ػ��鵼��AB��Բ����˳ʱ��ת�� 90°������ȡ��״̬,�ù����е�������,ȡ�绬�����������; BC ֱ�߶�ʱ,ȡ�绬���˶�ͣЪ,ѹ����������Լ�������,ȡ�绬���ڵ������������,����ȡ����ܺ����,ʵ����б���벢�г�ס�粧; ȡ�����ڳ��������� CA �����ܵ�����ķ��� F ������,��ʱ��ת����ʼλ��,��Ҫ��Բ��CD�к��߶� DA ����; ȡ������CD��Բ����ʱ����ʱ��ת��∠COD,ȡ�绬�뱣��ԭ�г�״̬��Ѩ������������ D,�������߶� DA,������������ת��뾶����С,ȡ�绬�뿪ʼ�������; Ѩ���类��ȡ����ܶ�ס�ϱ����ӻ����ϰγ�ֱ������������ֲ����,ʵ��Ѩ�������ЧͶ��.
����2 ȡ����������������
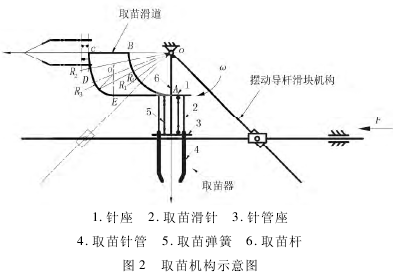
��������ȡ������Ѩ��Ѩ����ȡ����������������: ��ȡ������ԭʼλ��������ȡ��λ��; ��ȡ�����������Ѩ��ץȡ�粧; �����γ�Ѩ����ʹ������Ѩ��; ��ȡ��������Ͷ��λ��; �ݻָ���ԭʼλ��.ͼ 2��ʾȡ������ڻ���Լ������������������١��ڡ��ܡ���; Ȼ�����̵�λ���ǹ̶���װ,��Ҫ��ȡ��������������������粧����Ѩ��Ѩ�����ת��ȵĶ���,��ȱ�ٶ������̢�.���,�����ڴ˻�������������˲���ȫ���ֳ�����������.���������������ģ����ѹ���ǵȲ�����ͬ��������ͬ�ij��ָ��������Ŷ���,����������ȫ���ְ�װ��ͬһ��������,�����ϳݶ���,ͬʱ����ʱȡ������ɰ��綯��,һ������һ��������ʱ����ȡ�����ػ�������,���߶�������ʱȡ�������벢ץס�粧.������ʱ����ͼ 3 ��ʾ.
���������ٵij��ָ�����ͼ 2 ��ʾ����ȡ�����,������ij��ָ���������ͼ 2 ��ʾ����.A ����: �����ָ�����,ȡ���������ǰ��; B ����: һ���ָ���������,��һ���ϳ��ָ��ƶ����黬��,�����ڸ�������ת���İڶ�,���ȡ����ת��; C ����: �����ָ�����������,ȡ����ץȡ��; D ����: ���ָ��ٴ�����,��������ֱ���ƶ�,ȡ���������,��ɰ�ȡ��; E ����: һ�Գ��ָ����������ڸ���ת,���ȡ����ת��,��������ظ�����ʼ״̬.
����3 ȡ������˶��������
����3. 1 ȡ��������������Ľ���
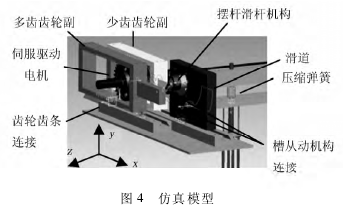
����������Ƶ�ȡ�����,����ά��ģ���� Pro/E ���������װ��[9 - 10],��ͼ 4 ��ʾ.�����"����"�����ж����������ٶ� 9. 8m/s2,����Ϊ y �Ḻ����; ֱ��������ת�������ɳ��ֳ��������ṩ,�ڳ��������ᴦ�����ŷ����,ת����Ϊ��ֵ; �����۴Ӷ����Ӵ��ֱ�����ִ�е��; ȡ������������������䶨��ȡ�絯��.
����
����3. 2 ȡ������ķ��������
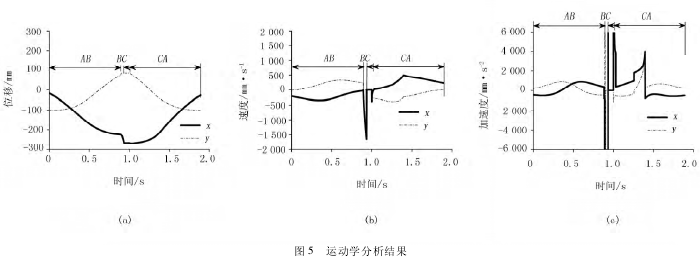
��������ɶ�ģ���˶�����Լ�����������������غɵ����Ӻ�,����ȡ���ٶ�Ҫ��,��һ��ת�ٽ��з�������.ͼ 5 ��Ϊȡ��������ĩ���ܻ��黬��Լ�����˶�������λ�ơ��ٶȺͼ��ٶ��� x��y �����ϵķ�����( ���������,����ȡ����ˮƽǰ�Ʒ���Ϊ x ��������,��������Ϊ y ��������,��ͼ 4 ��ʾ) .�����ʾ,ȡ��������˳��,�������¹ؼ��ڵ������:
������ȡ�绬����Լ��˲������ B.ȡ�绬���ڵ��������±�Ѹ���ͷ�������,x ������ϴ�˲ʱ���ٶ�.
������ȡ�绬�� C ��.ȡ������Լ������ײ��,���ܱ��λ����Լ��,�ٶ�����ٶ�Ѹ������.�۹���Բ��( ����Բ����ֱ��) ������ D ��� E ��,Ϊȡ�绬�뿪ʼ������ܵ�˲����ͻ�����.
����
����4 ȡ����������о�
�����ο�������,����ʱѡȡ�нϴ�Ť�صĵ��,�Կ˷���������еĸ�����ѧͻ���,ʵ�����ᶯ��.����ϵͳ�ɾ��������˻���������� LabVIEW����������������ݲɼ������������Ƶ�·�����.��Ƶ������̵���ϵͳ�趨�Ĵ�ȡ��λ��ʱ,�ɽ��������ͣ���Ƶ�·�����������ȡ�������ҵ.������������ͨ������ƽ̨����һ������Ƶ��,����ѭ������һ��ʱ���,�۲�û���ִ�ж�����λ,����˳��,δ�����κ�ͣ�������������.���ڳ��ֳ�����ĩ�˰�װ���г̿���,��һ������������ɺ����ÿ���,��Ϊ��������˶����Ƶ��źŷ���.����������Ϊ: ��ͬʱ��װ�� 8 ��ȡ����ʱ,ȡ���ٶȿɴ� 80 ��/min.
����5 ����
�������������һ�ֵ�������ȡ�����,��ȡ��������������������Ƽ��˶������ʹѨ���类������ȷ�ؼ�ȡ��Ͷ�ŵ���ֲ������.���� Pro/E ������ƵĻ�����������������ģ��,��������ó���ȡ�绬���еĸ����νӵ㴦��������������ײ�������Գ��,��ѧ�����ڸõ��з���ͻ��.���ݸ÷�����,��������ѡȡ���нϴ�Ť�ص�������,��ʹ��ȡ������ȡ�绬�����νӴ�ȷ����,���ܺܺõ��������Ի����Զ�ȡ��Ҫ��.���ͬʱ,ȡ�绬�����Ż����Ҳ�ǽ��������ͻ��Ĺؼ�; ����,�Ľ��Ż��������ʹ�û������������õ�ʵ�ʲ�������,�⽫��Ϊ�����о�����.
���������:
����[1] ������. ��е���������Ե���״��չ��[J]. ũ�����о�,2006( 3) : 26-27.
����[2] ������,������. Ѩ�����Զ����Ի����о���չ[J]. ũҵ�Ƽ���װ��,2009( 5) : 28-31.
����[3] ������,������. �����Զ����Ի�ȡ����������[J]. �й�ũҵ��ѧѧ��,2000,5( 4) : 58-60.
����[4] ��ʯӢ,������,����ȫ,��. �ɵ���ʽ����Ѩ�����ֲ����֮�о�[J]. ũҵ��еѧ��,2003,12( 1) : 11-24.
����[5] ��ʫ,���ز�,������,��. Ѩ�����Զ����Ի�е�ֵĽṹ��������[J]. ����ũҵ��ѧѧ��,2007,38( 3) : 437-439.
����[6] ������,������,��ʿ��. 3 �ֺ������Ի���ֲ�������ܷ���[J]. ����ũҵ��ѧ,2006,34( 24) : 6722-6723,6725.
����[7] ������,������. Ѩ������λ���ʽȡ�����������о�[J]. �㽭ũҵѧ��,2011,23( 1) : 154-158.
����[8] ������,������,����,��. Ѩ�����Զ�ȡ������ϵͳ������[J]. �Ͼ�ũҵ��ѧѧ��,2011,34( 3) : 122-126.
����[9] ��. �����Ի��������������[D]. �Ͳ�: ɽ��������ѧ,2006.
����[10] �����,��С�C,�ι���,��. Ѩ�������Ի�ĩ��ִ���������������������[J]. ũҵ��еѧ��,2010,41( 10) :47-53.

���������ҵ���ִ�ũҵ�����бز����ٵ��������̣�Ŀǰ���õķ���������Ҫ����ʽ�缰Բ����ȡ���ʽ��������õķ��Ҹ������ܣ�Ϊ�������ػ��������ܼ�����ʽ��Ҳ������ũҵ��������ʷ�ƾá�Ӧ����㷺�ĸ��ػ�е���������ʽ��ֻ�ܵ������ң����Һ��...
�ڻ�̫��������һ������ũ���ȵ��Ժ�ʽũ����ˮ�ô����׳�������վ�����ϵĶ����䱸Ϊ���ͻ�����6135������Ҫ����ʱ��ͨ�������������λ��ʹβ�ἰ��������ת������Ҫ��ˮ�Ź�ʱ��ͨ�������������λ��ʹ�����鼰ˮ����ת���Ӻӵ��г�ˮ���ٽ�����...
����Ŀǰ��ȫ��������ũ���ѻ���ʵ��ũҵ��е�����Ժ���������Ϊ������������9��ũ�������֡�113������ũ������ũҵ��е�ܶ�����600��kW��ӵ��ũ�ô�����������4��5��̨������������ũ��11��̨������ˮ��������6��̨�ࡢ���������ջ��е1��...
0�������ܻ�С�����ֻ������������С�����ֻ��Ĺ������Ⱥ���Ч��,�ȱ�֤�����������ȷ�ԺͿ�ѧ��,Ҳ�����ڽ�������ɱ�������������������Ч��[1].Ϊ�����С�����ֻ������ܻ�ˮƽ,��ʡ������Դ��ʱ��,��߹���Ч��,�о���С����ҵͼ�Զ�����ϵͳ....
������Դ�뻷�����������������չ����˲��ɹ�����ѹ��:һ���棬��Դ��Ϊȫ�÷�չ��Ϊ��Ҫ�Ķ������ڲ��õ�δ�����Ĵ���;��һ���棬��ͳ��Դ���ճ�ʹ���и�ȫ������������˸�����Ⱦ������������̫�����Ի�ѧ����ʽ�������������е�������ʽ��...
������Ϊһ��ũҵ������ҹ�ũҵ������ũҵ��ϵ�Ӵ��˿ڲ���������ũ��Ʒ������ȫ�����⡣�ҹ����ֵ�ũҵ��ֲ��ά���ڿ���Է��������������ĽΣ�ӵ�д�������ص���ֲ���������е����ֲת�䣬���Թ���ũ��Ϊ��������ֲ���壬�Ѿ���ʼ��ũҵ�ִ���...
������Ѩ�����羫�ܲ��ֻ��о���״��ԭ������
�����ҹ�Ŀǰ����2/3���߲���������������Եķ�ʽ������������ķ�ʽ��Ҫ��Ѩ�����硢�������缰ˮ������ȣ�����Ѩ������Ϊ����1��4�ݡ�Ѩ�̲���������Ĺؼ�����֮һ����ͳ��Ѩ�̲������˹��㲥Ϊ���������Ͷ�ǿ�ȴ���Ч�ʵ͡��������ڳ�������...
�������ҹ����ϵ���Ӧ�õ��谭���ؼ������
�����ҹ����ϵ����ĵ��������ꡢɽ��Ϊ����������С�����ɢ���������ͼ�ֲ�����ֶ�����ȱ����������ũ�����ת�Ƽ�Ϊ���㡣��һ������������е���ķ�չ����Ϊֹ���¾����������Ρ���20����90�����ǰ����������Ҫ����������ɣ��ַ����������...
0������߸����Ҷ������Ҷ�ʡ����ٷ�����������������Ƹ걦���Ҷ�������뿼�ǵ�����.�걦��ȫ���DZ�,��Ұ������άֲ��,���������ҹ������μɳ�ĵغͺ�̲�ص�һ�ֿ����Ժ�ǿ�Ķ��������ݱ�ֲ��.����Ӧ��Χ��,��������ǿ,���γɿ�״��Ƭֲ��Ⱥ��,...
0�����Գ�������,�ҹ��㷺���ô�ͳ�ķ�������,Ȼ���������ҵ��о���ʵ��������:��ͳ�����ڴ����ô���ͬʱ����ɸ����Σ��,��Ҫ����ע�⡣����,�������ֵ�һ�ĸ���������Ӿ������ķ�ʴ��ˮʴ,�����ƻ��ر�ֲ��������,���������Ϊ���ȵķ�����������...