力学作为一门科学,对于人类的发展而言是极为重要的.力学改变了人类生活的现状,也改变了人类发展的历史.力学的发展历史,经历了萌芽时期,静力学发展时期,动力学发展时期,刚体力学和应用力学发展时期,近代力学发展时期和现代力学发展时期,在不同的发展时期,力学有着自己的特征和表现.而随着社会的发展,力学在创新和学科交融方面,又展现出了新的特征.下面是搜索整理的动力学论文8篇,供大家借鉴参考。
动力学论文第一篇:套环魔术的动力学分析和条件分析
摘要:定量分析了“魔术套环”的动力学过程,一定的初始转动动能的存在是“魔术套结”的首要条件,即初试转动动能使得圆环可克服铁链的压力矩做功,通过计算可知圆环可转入铁链的最大角度为φ时圆环转动动能为0.在α=φ处圆环所受力矩不平衡,仍有压力矩MF(线性恢复力矩)的存在,如果忽略空气阻力且铁链无限长,则圆环会在有竖直向下加速度的非惯性系中做简谐运动,只要铁链长度可使得圆环与Z轴角度α满足π/2<α<φ,就可以使圆环套结.
关键词:线性恢复力矩; 刚体转动; 简谐运动;
Dynamic analysis of the magic iron chain and iron ring
ZHOU Li-ting ZHU Lei-lei HUANG Xiao-hong XIONG Ju-feng
School of Physics and Electronic Science,Hunan Normal University
Abstract:The dynamic process of the “magic iron chain and iron ring”was quantitatively analyzed.The existence of certain initial rotational kinetic energy was the first condition of the“magic of iron chain and iron ring”.At the same time,we could know that the torque of the ring was unbalanced atα=φ,and there still existed the pressure moment MF(linear recovery moment).If the air resistance was ignored and the chain was infinitely long,Then the ring would move harmonically in a non-inertial system with vertical downward acceleration.That was,as long as the length of the iron chain could make the angleαbetween the ring and the Zaxis satisfyπ/2<α<φ,the ring could be clasped.
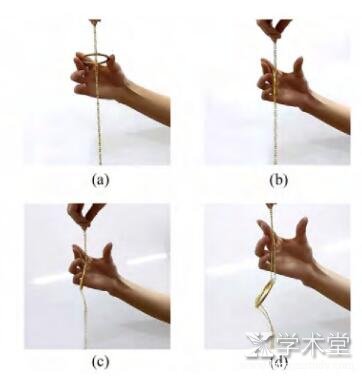
魔术是一种娱乐性的艺术魔术也蕴含着丰富的物理原理.本文探讨了魔术套环的动力学过程.王惠明教授等通过一系列实验与动力学分析得出完成魔术套环的关键在于使圆环经过一次碰撞,获得一定的初角速度[1].将铁环下落分为3个阶段———自由落体、碰撞和铁环转动,从角速度和角位移的角度描述了铁环套结成功所需的条件,但是其动力学分析只停留在定性描述上,条件只分析了初始角速度,初始准备条件也只分析了碰撞方式.本文定量分析了铁环下落各个阶段的动力学过程,从力矩和能量的角度计算了铁环套结成功的条件,即铁链宽度与直径的关系、初始角动量、铁链长度和铁链材质,结合对原理的应用,增加了几种准备动作.
1 魔术套环的动力学分析
从圆环套结过程中关键处示意图(图1)可知,魔术情景下拇指提前释放,使得圆环重力矩不等于零,圆环具有初始角动量L0,由于初始角动量的存在让圆环套结成为可能.
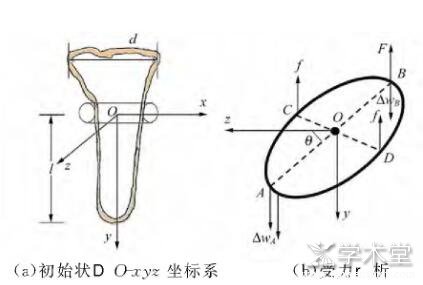
为了分析“魔术套结”的动力学过程,将分为3个阶段,且建立O-xyz坐标系(图2),设圆环质量为m,圆环半径为r,圆环与z轴的角度为α,铁链宽度d,铁链长度l.
图1 圆环套结过程中关键处示意图
图2 初始状态O-xyz坐标系图和第1~2阶段重力、支持力和摩擦力对圆心力矩分析图
1.1 第1阶段:从拇指开始释放到圆环全部离开手(0<α<θ)
设食指与圆环接触部分圆环质量为Δm,对圆环进行受力分析(不计空气阻力),圆环受到重力、支持力和摩擦力作用,第1阶段末状态受力分析示意如图2所示.
从铁链宽度d与圆环直径D=2r关系的角度开始讨论,分以下2种情况:
1)d>D
摩擦力f≠0,摩擦力对圆心的合力矩Mf=0.重力W=mgj,支持力为F=-Δmgj(通过静摩擦力的方式提供接触部分质元重力的支持力,由于圆环对接触点的向心力在圆环直径方向,对质心速度与圆环对圆心的转动影响不计,且时间间隔短,所以忽略此方向的支持力),重力与支持力对圆心的力矩分析如图2所示.
重力和支持力对圆心的合力矩为M=rΔWsinα=rΔmgsinα,根据刚体的动能定理,有圆环转动惯量J=mr2.
摩擦力f=0,摩擦力对圆心的合力矩Mf=0.重力和支持力对圆心的合力矩为M=rΔWsinα=rΔmgsinα.
根据刚体的动能定理,有,J=mr2,在第1阶段中,由质心运动定理W+f+F=ma1,摩擦力大小无法确定,因此当α=θ时,设定质心加速度为a1.
1.2 第2阶段:从圆环脱离手到圆环与铁链成π/2角度(θ<α<π/2)
由于此阶段没有支持力,圆环只受到重力和摩擦力的作用,考虑到圆环的对称性,分析重力矩和摩擦力矩(图2).重力矩MW=0,摩擦力矩Mf=0(与第1阶段同理),与第1阶段类似,设这一阶段的质心加速度为a2.
1.3 第3阶段:圆环与铁链角度α由π/2到大于π/2(α>π/2,即套结过程)
这一阶段的某一角度α力矩分析如图3所示,圆环在这一阶段受到重力、压力和摩擦力作用.合重力矩MW=0,合摩擦力矩Mf=0(同一直径上2点摩擦力大小相等,方向相同),合压力矩MF=4r×Fsinβ=-4rFsinβi,其中,压力F大小随角度α变化且角度β非不变.已知α=π/2时,圆环初始转动动能为Jw2/2=∫Mdα,J=mr2.由能量守恒:Jw2/2=∫Mdα,即在π/2<α<φ的过程中,圆环的初始转动动能转化为压力矩做功,当α=φ时圆环的转动动能为0.在第3阶段中,由质心运动定理W+f+F=ma3,摩擦力大小f=μF.
图3 第3阶段某一角度α接触点受力与力矩分析图
计算表明,由于初始转动动能的存在使得套结可以实现,即初始转动动能使得圆环可以克服铁链的压力矩做功,通过计算可知圆环可转入铁链的最大角度为φ(圆环转动动能为0).同时在α=φ处圆环所受力矩不平衡,仍然有压力矩MF(线性恢复力矩)的存在,如果忽略空气阻力且铁链无限长,则圆环会在有竖直向下加速度的非惯性系中做简谐运动.其中简谐运动的运动学方程可表示为:α=φcos(ωt+δ),其中ω为角速度,δ为初相位,且设竖直向下加速度为恒定a,则y方向上运动学方程为:y=at2/2.因此制做出α与t的关系示意图(图4),图中(t0,t1),(t2,t3)阶段角动量守恒,则α与t的斜率k为常数,即只要时间t(铁链长度)可以使得圆环与z轴角度α满足π/2<α<φ,就可以使圆环套结.
图4 角度α与时间t的关系示意图
2 魔术套环的条件分析
1)准备动作如图5所示,为了使套结能够成功,就要使圆环具有初始转动动能.本文实验了3种情形:a.利用中指与圆环发生碰撞;b.握圆环的手优先释放拇指;c.利用拇指与食指提供作用力.最终采用b情形,使铁链平面在Oxy平面上,圆环与手的接触直径在z轴上(使得初始力矩和第3阶段压力矩都在x轴方向上).
图5 a,b,c3种情形初始准备动作示意图
2)从第1阶段中分析计算可知,D与d的大小关系与摩擦力矩无关,而在第3阶段的合压力矩中,圆环与铁链接触点P与圆心的连线OP与x轴的夹角为β,β与d和D的关系有关.当d<D时,d越小则角度β越大,初始合压力距MF越大,最大角度φ越小,则满足π/2<α<φ的长度l越短.通过D>d,D=d和D<d的3种情况的实验,也证明了这一结论.
3)本文采用是铁链和铁环,由于其材质密度、光滑度、柔韧性等方面的适宜,使得在第3阶段有线性恢复力矩的存在,圆环可以做简谐运动.针对柔韧性这一因素,将铁链换成柔韧性较大的软线环和柔韧性较小的铜丝环分别做实验,发现柔韧性过大则线性恢复力矩过小(接近于0)、链环长度l只要大于某一值y1+D(图4)即可,柔韧性较小则线性恢复力矩过大使得符合条件的链环长度l范围过小,即套结难度过大.
4)从图4可知,在y1<l-D<y2,y2<l-D<y4…时,圆环与铁链可以完成套结.
3 结论
定量分析了魔术套环的动力学过程,一定的初始转动动能的存在是魔术套结的首要条件,即初始转动动能使得圆环可以克服铁链的压力矩做功,通过计算可知圆环可转入铁链的最大角度为φ时圆环转动动能为0.在α=φ处圆环所受力矩不平衡,仍然有压力矩MF(线性恢复力矩)的存在,如果忽略空气阻力且铁链无限长,则圆环会在有竖直向下加速度的非惯性系中做简谐运动.即只要铁链长度可以使得圆环与z轴角度α满足π/2<α<φ,就可以使圆环套结.
参考文献
[1]王惠明,庄表中,费学博.一个魔术的动力学分析——铁环与铁链套结过程[J].力学与实践,2009,31(3):108-109.
[2] 漆安慎,杜婵英.力学[M].2版.北京:高等教育出版社,2005.
动力学论文第二篇:工程机械臂动力学性能控制和系统结构优化
摘要:如今随着科技的不断创新与发展,使得各类机械产品的性能、精确度以及使用寿命等方面都有了十分显著的提升,这些内容也正是加强机械产品设计的主要部分。而工程机械臂是各种工程机械设施最为主要的部件之一,是充分展现工程机械动力学性能的基础,能够有效的提高工程机械的质量、运行效率以及安全,对工程机械的准确程度方面有着重要的影响,所以本文就对其进行了研究。
关键词:机械产品; 机械设施; 运行效率;
1 总体的研究现状
1.1 多体系统动力学的整体研究现状
一般来说,工程机械臂是一套多体系统,且具有典型的特征,多体系统的结构界定较繁琐,是由物体、铰、外力等部件所构成的,同时存在拓扑结构的系统。通常多体系统的动力学是研究规律的科学,主要研究的是多体系统运动规律,其中还可以划分更多的层次,主要包括:多刚体系统动力学以及多柔体系统动力学,其中这两者的关系我们可以用图1来体现。而研究的内容为刚体、柔体系统动力学模型的理论、计算、微分方程、机构综合探究、柔性效应、优化措施以及结果可靠程度等等。现阶段的多体系统动力学已经有了较为全面的分析方法,其中最为普遍的方法有:拉格朗日方程分析法、牛顿欧拉方程矢量学法、图论法以及变分法等。
图1 多刚体系统和多柔体系统之间的关系
1.2 工程机械臂的研究内容及其现状
工程机械臂的部位是整个工程机械设施最为主要的部分之一,对它的设计方面会影响到整个工程机械的运行情况、性能以及生产效率等。如今对工程机械臂的研究内容主要包括以下几方面:
(1)工程机械臂的系统动力学微分方程研究。因为多体动力学常见的建模方法为罗伯森维滕伯格法、牛顿欧拉法、拉格朗日法以及休斯敦法等等,所以对于机械臂多体动力学的微分方程正是建立在这些方法之上的。
(2)机械臂的动力学仿真研究。此方法主要是通过力学的分析软件对机械臂的系统展开了仿真处理,得出受力情况的仿真曲线,给工程机械装置动力学的性能研究带来根据。
(3)工程机械臂的模型研究和动态优化。机械的结构性可以用相关模型指标来表示,主要是通过结构的振动模型指标来表示,其中模型的参数包括许多项目,主要包括:振动频率、阻尼和振型,通过这些指标就能够判断出机械结构特性的好坏。经过对指标的具体分析,我们可知机械臂的系统结构具有固定的频率和振型。经过对工程机械臂的模型研究和动态优化,可以有效的提升工程机械臂的系统运行效率和质量。从工程机械臂的角度上看,探究其结构并优化对设计方面来讲会更有效果。对动态结构的优化主要目的就是为了确保机械臂的框架更加优化,增强机械装置的运行效率以及稳定性。
(4)工程机械臂的系统轨迹策划和优化。轨迹策划就是指找出机械臂的端点和每个臂杆转角之间的关系,通过优化与控制相结合的办法,找出臂杆的运动轨迹。因为柔性臂的结构框架比较有弹性,在运动时其末端会发生抖动,因此应该采取有效的控制方法来得出准确的运动轨迹。
2 工程机械臂动力学性能智能控制
工程机械臂的系统比较复杂,它的属性是非线性的,属于多变量系统,其具有高阶次、不稳定、多变量、非线性以及强耦合等特性,所以如果将其作为控制对象,就必须采取科学、合理的控制方法,才能有效的对其性能进行研究。重点应对工程机械臂的动态性能进行研究,例如运行的速度、振型、频率以及运动轨迹等。现阶段工程机械臂的运动轨迹控制越来越受到人们的关注,并逐渐成为了热门内容,正因为工程机械臂的不断应用,因此大量的学者和专家纷纷对工程机械臂进行探究,他们一般采用不同的控制理论来探索,与此同时也提出了相应的控制方法,当前控制方法有许多,主要包括:鲁棒控制、自适应控制等等等,这些方法在特定的情境下都有一定的成效。这里面需要提到的是PID控制器,PID控制具有许多优势,它的结构非常简单,是日常应用最广泛的一种控制方法,它的应用也非常广泛,许多大型企业都在应用,其原理图为图2。
图2 PID控制系统原理图
3 工程机械臂的系统结构优化及过程
对工程机械臂的系统结构优化研究是现阶段的重点内容之一,对工程机械臂的合理化设计能够有效的提高机械装置的强度,减少损坏和伤害,不过静态的优化措施已无法满足现代化的要求,所以必须采取动态的优化方法来增强机械设备的强度和设计。动态的优化方法是在静态的优化方法之上形成的,经过对机械部件中相关参数以及分布情况进行调整,以提高部件的动态性能。如今是科技化的时代,越来越多的机械设备被大量的使用,因此对其性能、结构以及设计等方面的优化更加受到了人们的重视。
3.1 机械臂动力学系统动态优化的实现过程
对机械臂动力学系统结构的研究中最常用的方法就是有限元法。通常机械臂的结构是由板、杆等部件组成的,通过有限元法能够准确的构造出实际的机械装置,有很高的精确性。有限元法的优化机理主要以变量分析为主,通过变量分析来了解机械的结构,其主要是建立于高灵敏性分析以及级数展开式的基础之上,类似于重分析法。变量分析的主要流程是:当设计参数在规定的范围当中出现变化时,探究机械装置的固有频率以及动刚度等动态性能的变化,先制定出目标函数、设计变量以及状态函数,然后求解,最后改善机械装置的薄弱之处,增强机器的动态性能。图3就是结构变量化动态设计的流程。
图3 结果变量化动态设计
对机械系统建设有限元模型,通过动力缩减工艺得出结构动力学的有限元方程为:
其中,M表示构件总质量矩阵,K表示构件总刚度矩阵,C表示构件总阻尼矩阵
X1i为强迫运动速度,X2i为强迫运动加速度,fi为主动力,Rs为反作用力,i为约束自由度,s为未约束自由度。
通过上述公式我们能够得出结构振动系统的固有频率、振型等,主要是通过位移、速度、加速度、应力、应变等指标得到。研究结构系统的固有频率和振型是动态优化设计的基本,通过此机械模型能够有效的发现影响结构动态性能的模态频率,并可将其作为动态优化的主要目标函数。
3.2 工作装置有限元建模
我们在UR里模拟出了某机械装置的三维模型,同时将一些影响非常小的因素除掉,如螺纹孔、圆角以及倒角等微小的影响因素,然后在NASTRAN当中设置出各项变量的属性,其中材料的弹性模量设置为2*1011MPa、泊松比为0.3、密度为7800kg/m3、重力加速度为9.8m/s2。其次将工作装置划分成网格,主要的划分方法为自由网格划分法和四节点四面体实体单元划分法,可将工作装置划分成119584个单元和57126个节点。工作装置借助销轴把每个部件相连接,销轴铰接的具体处理形式为:除去销轴,在销轴的中心销处设置外部的节点,将其与销轴孔的内表面之间通过单元形成刚性的区域,制约径向自由度,留置切向自由度。
算出机械臂装置的固有频率和振型是研究机械系统动态特性的主要部分。因此可以采用模态分析来算出机械臂装置的固有频率以及振型,其中模态分析的内容包括两部分,分别为:自由模态和约束模态,在进行模态分析时只需对几种较为典型的工况实施探究即可。在研究时应将工作装置、回转平台以及动臂油缸作为一个整体,保持不变。具体的结果详见表1。
表1 标准挖掘工况下的模态前十阶固有频率

通过模态分析的结果我们能够发现,对此工作装置频率的影响主要是在前几阶上,而且前阶的固有频率都在之中,所以分析工作装置模态时,应对前阶频率展开探究。
3.3 通过有限元软件分析工作装置结构动态优化
NASTRAN有极强的优化设计性能,能够对静力、模态、频率以及振型实施优化。在优化的过程当中,其允许有限元软件实施多个响应来优化目标函数,具体的指标有速度、位移、加速度、应力、频率、体积和它们的组合等等,设置的变量约束可为1D、2D、3D以及模型约束等。
图4
表2 挖掘机动态优化前后前阶固有频率比较

以第2阶固有频率f2最大作为动态优化目标,即
其为最大化臂架的弯曲刚度。
依照此优化模型,通过有限元软件NASTRAN的优化部分,设计目标函数、相关变量以及约束条件等得出结果,详见表2。
经过图表当中的数据以及结果对比我们能够发现:(1)对工作装置动态性能影响最大的为第2阶,频率升高了24.42%,弯曲刚度显著减少。(2)优化以后使得机械臂的重量减少了240.602kg,钢材与原来比节省了12.9%,显著减轻了机械臂的重量,使得改善后机械臂变得更为灵活。(3)机械臂的动应力比原来降低了166.37MPa,同时静、动应力差从83.059MPa变为了10.054MPa。由此可见,动态优化能够有效的增强机械臂的动态性能以及抗疲劳性能。(4)优化之后机械臂的水平静位移比之前的降低了32.7%,最大动位移减少为15.68mm,使得静、动态性能都显著的增大了。(图4)
4 总结
总之,工程机械臂的系统结构对工程机械装置的动力学性能有着严重的影响,不仅能提高工程机械的整体性能,而且还能有效的增强工程机械的运行安全、施工进度以及工作效率,所以对其进行探究是很有必要的。
参考文献
[1]陆佑方.柔性多体系统动力学[M].北京:高等教育出版社,1996.
[2] 宋建龙.柔性机械臂动力学建模与仿真研究[D].天津:天漳大学,2001.
[3]吕广明.工程机电技术[M].哈尔滨:哈尔滨工业大学出版社,2004.