农业机械化论文

0 引言
提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,同时还具有独特的保建功能,是理想的绿化植物和经济植物,开发利用潜力巨大[1].通过过去和近几年对罗布麻和戈宝麻一些研究文献的分析表明,戈宝麻采叶机器的研发还处于起步阶段.华南农业大学针对戈宝麻叶子的力学特性和生长外形,对其采叶器进行了研制,总质量不超过 120kg,并根据预备实验的效果初步设计出戈宝麻的采叶机构,如图1 所示.图 1 中,两水平移动机构带动压滚相互地往里运动,从而对中间戈宝麻产生挤压作用;高速旋转的柔性条对压滚间的戈宝麻叶子进行鞭打,使其脱落.在设计柔性条机构及确定相关参数的过程中,需要测得柔性条在不同速度及方向鞭打戈宝麻时叶脉处产生的破坏力.现在采用的较为普遍的方法是通过试验测量[2 -4],需要建立具有一定规模的试验平台,成本较大,而且试验周期较长[5 - 6];而采用有限元仿真的方法对戈宝麻采叶机构进行设计则能够大大降低试验费用,缩短开发周期.目前,利用有限元的方法对农业生产过程中的切割器进行仿真还只是处于起步阶段,还未能够对切割过程中的刀具与被切割对象的复杂相互作用进行较为有效的模拟[7 - 9].
本文的主要研究工作是利用有限元软件 LS_DY-NA 对柔性条鞭打戈宝麻叶过程进行仿真,在一定范围内得出不同速度和打叶方向对叶脉处最大破坏力的关系,为采叶机构的设计提供依据.
1 仿真模型的建立
1. 1 材料模型的建立
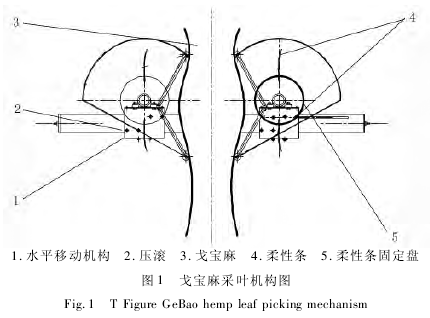
戈宝麻叶子由叶片与叶脉组成,而叶脉与叶梗连接.叶子与叶脉采用相同的材料模型 - 单向复合材料模型,并且各自使用不同的力学参数.柔性条材料是尼龙 PA66,在 ls _dyna 上使用非线性弹性材料BLATZ - KO,该材料需要定义剪切模量.通过 WD -E 精密型微控电子式万能试验机测出叶片、叶脉、叶梗的弹性模量以及尼龙条的剪切模量,通过多次测试取平均值,测试次数为每种 50 次.
1. 2 建立几何模型与划分网格
根据文献的记载,戈宝麻的叶形为椭圆状披形至矩圆状卵形,叶序为单叶对生,分枝处常互生;成熟的叶片长约为 4cm,叶宽约为 1. 4cm,叶柄长约为 4mm,叶子厚度为 0. 2mm;叶脉与梗相连;戈宝麻的梗直立生长,直径约为 2 ~3mm[1 0 - 1 1].由图 1 可知,采摘的时候,上下滚筒对戈宝麻进行挤压作用.对于戈宝麻梗来说,其上部与下部的位移因滚筒的挤压而被约束住.因此,为简化模型,梗的模型建立则取一段长约为 3cm、直径为 2mm 的梁所代替,如图 2 所示.

柔性条采用长 168mm、直径 4mm 的圆柱实体.为了使计算简化,对于叶脉和梗均采用梁单元 beam161.根据前面的模型,在 real 中设置各梁单元直径.叶片采用壳单元 shell163,在 real(实常数)中设置壳单元的厚度为 0. 2mm.如图 2 所示,为了使叶片与叶脉能够相互传递应力,在划分网格时采用同节点划分.
1. 3 建接触定义和加载
柔性条与叶片之间的接触使用接触算法* CON-TACT_AUTOMATIC _ SURFACE _ TO _ SURFACE.初始状态的加载:对于柔性条给予一转速度.当柔性条碰撞到叶面的时候速度会下降;而实际上,柔性条固定在恒定转速的固定盘上(图 1 所示),当柔性条碰撞到叶面时,其中部角速度也不会有太大的改变.为了符合试验的实际,在柔性条外面套上一恒转速的圆柱刚体,其转速与柔性条相等.刚体与柔性条之间的接触仍使用上述算法.
仿真过程中为了达到脱叶的效果,叶梗与叶脉之间采用点焊连接.对于点焊,其失效准则可以表述为

式中 fN、fS-点焊的法向和切向力;
SN、SS-点焊的法向破坏力和切向破坏力;
EXPN、EXPS-效准则中法向力和切向破坏力指数.
为得到上述参数,采用 WD - E 精密型微控电子式万能试验机,测试出戈宝麻叶脉被拉断时的拉力与其被切断时的压力.采用采样测试,测得叶脉被拉断时的拉力约为 20. 6N,叶脉被切断时的压力约为 15. 3N;法向力和切向破坏力指数均设为 1.
2 仿真试验设计
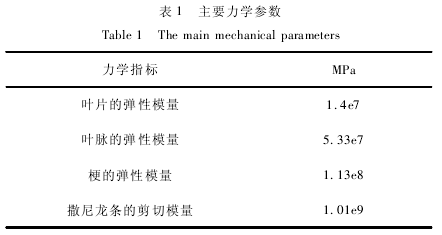
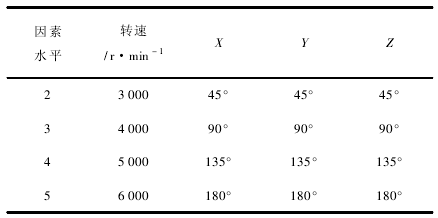
为了优化采叶机构的设计,达到较高的采叶率,需要算出不同打叶情况下戈宝麻叶脉的最大应力.本仿真实验中考虑到 4 个因素会对叶脉处应力的最大值有影响,分别是柔性条的转速和 3 个打叶角度 X、Y、Z.图 3 说明了 3 个打叶角度所代表的方向.考虑到各因素之间有交互作用,采用 4 因素 5 水平的正交试验.各因素取值如表 2 所示.
仿真中,记录各情况下叶脉处的最大应力,分析转速以及各个打叶方向对叶脉处产生的最大应力是否有显着影响.
3 仿真结果及分析
3. 1 叶脉断裂的形态及应力分布
采用试验中的速度范围值,在切割过程中刀具与甘蔗的相互作用时间约为 0. 1 ~0. 5ms,由于作用时间比较短,在实际试验中难以观察到其详细的切割过程;而通过有限元仿真,则能够对切割过程做一个较为详细的观察与分析.
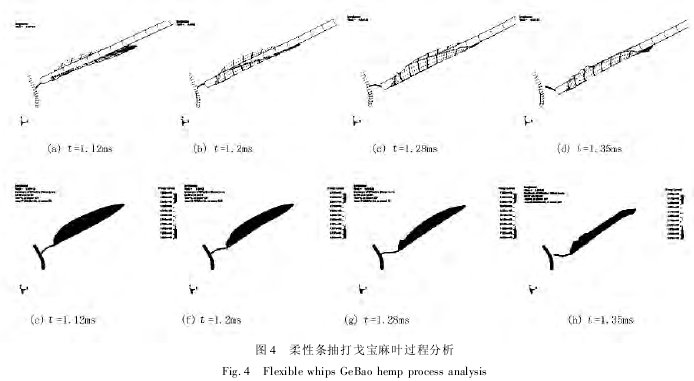
图 4(a) ~ (d)动态地显示柔性条抽打戈宝麻叶片的过程,图 4(e) ~ (f)为对应的叶子应力分布图.
该过程可以分为 3 个阶段:第 1 个阶段为接触阶段,如图 4(a)所示.刚开始柔性条与叶片接触,使得叶片发生了轻微的变型.叶片上的最大 von miss 集中在柔性条与叶片的接触点上,此时的最大应力约为7. 3MPa.第 2 个阶段为柔性条与叶片之间的拉扯阶段,如图 4(b)和图 4(c)所示.由于刚开始柔性条与叶片的碰撞,造成叶片有离开柔性条的趋势,使得两者之间的应力降低.如图 4(b)中,在 t = 1. 2ms 时最大应力下降到 6. 8MPa 左右;随着中间刚体的作用,柔性条转速有加速的趋势,使得叶片的应力上升.从图4( e) 、( f) 可看出叶子的 von miss 有明显的上升,最大值达到整个过程的最高值约为 7. 8MPa 左右.第 3 个阶段为叶子的断裂阶段,如图 4(d)所示.由于两者的正压力、摩擦力的作用以及柔性条的旋转运动,使得叶子有离开叶梗的趋势.在叶梗处有明显的变型,当叶脉处的应力达到叶脉与叶梗处的法向或切向的破坏力时,叶子脱离叶梗.
3. 2 柔性条击打的角度以及转速对叶脉处最大破坏力的影响
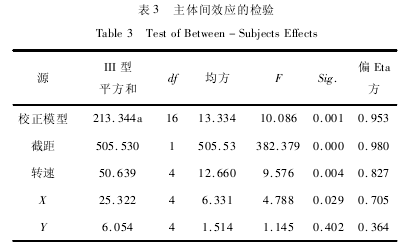
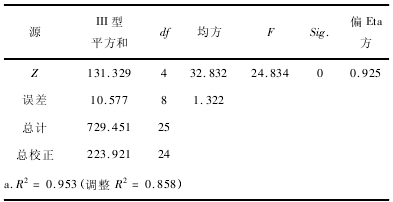
通过正交试验 L25(54)考察不同的转速(因素 a)与不同的方向(因素 b、c、d)对叶脉处最大破坏力的影响.在 ansys 中使用 ETABLE 与 PRETAB 命令,能查出叶脉处的相关参数.正交仿真试验结果如表 3 所示.
由表 3 可知,各因素对结果形响大小的排列为 Z> 转速 > X > Y.其中,转速以及因素 Z、X 的显着值(即 SIG 值)均小于 0. 05,可知此三因素对结果的影响显着.因素 Y 的显着值大于 0. 05,因此因素 Y 的改变对结果的形响不显着.
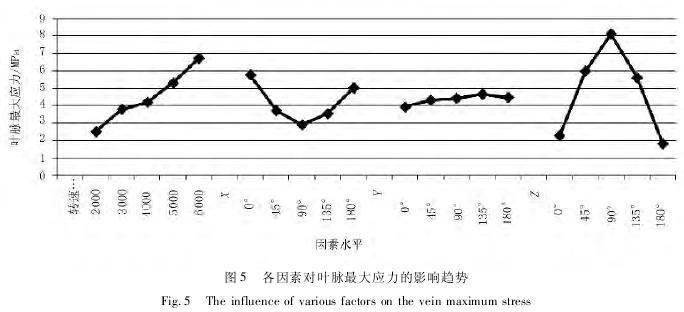
由图 5 可以看出,叶脉处的应力随柔性条转速的增高而增高.对于应力影响最大的因素 Y,当 Y = 90°时(即当柔性条的旋转中心与叶片在同一水平面时)达到最大应力;而随旋转中心向上或向下达时,应力急剧减少.当旋转中心与叶子几乎在同一垂直位置时,应力达到最小值.在实际的设计中,应尽量使更多叶子与水平处的柔性刀进行接触,从而达到更高的脱叶率.从因素 X 的趋势图中可知,当柔性条鞭打的方向与叶片表面平行的时候应力最小,垂直方向应力最大.x =0°时(即柔性条从上往下正打叶子)的应力大于 x = 180°时(即柔性条从下往上正打叶子)的应力.因此,在实际的设计中应采取从上往下打的方案,而且要采取策略使得叶子的叶面尽量地平行于柔性条.对于 Y 因素,因为影响不显着,实际中可不予以考虑.
4 结论
本文通过有限元软件,在不同的柔性条转速和角度条件下对戈宝麻叶子鞭打进行了仿真分析.分析结果表明:鞭打过程中,柔性条转速的变化、X 向和 Z向的改变对叶脉处应力的影响较为显着,而 Y 向的改变对叶脉处的应力影响不大;应力随柔性条的转速的增大而增大,在柔性条与叶片平行时,叶脉的应力达到最高值.
此仿真结果为本样机的设计提供了重要的理论基础,同时也减少了实际试验中的成本,对于后续的样机改进也有一定的参考价值.
参考文献:
[1] 张秀玲. 野生药用纤维植物罗布麻[J]. 大自然,2006(4):42 - 43.
[2] 高杨坚,梁兆新,莫建霖,等. 甘蔗切割器切割质量影响因素的试验研究[J]. 农业工程学报,2005,21(5):60 -64.
[3] 黄汉东,王玉兴,唐艳芹,等. 甘蔗切割过程的有限元仿真[J]. 农业工程学报,2011,27(2):161 -166.
[4] 贾赵锋. 微型气力式砍蔗器的设计与研究[D]. 广州:华南农业大学,2007.
[5] 杨家军,刘锋,刘喜云. 甘蔗收获机切割器的动态设计[J]. 机械科学与技术,2000,19(6) :923 - 926.
[6] 刘庆庭,区颖刚,卿上乐,等. 甘蔗茎秆切割力试验[J]. 农业工程学报,2007,23(7):90 -94.
[7] 吕小荣,任文涛,吕小莲,等. CAD/CAE 在 9LRZ -80 秸秆揉切机切碎器设计中的应用[J]. 农机化研究,2007(4):90 - 92.
[8] 朱国,谭鹤群. 鱼体在剖鱼机夹片中受力有限元分析[J].农业工程学报,2008,24(4):44 -48.
[9] Reiterer A,Sinn G,Stanzl - Tschegg S E. Fracture charac-teristics of different wood species under mode I loading per-pendicular to the grain[J]. Materials Science & EngineeringA,2002,322(1 /2):29 - 36.
[10] 谢彬,努尔巴依·阿布都沙克. 新疆罗布麻的生物生态学特性研究[D]. 乌鲁木齐:新疆大学,2009:18 -22.
[11] 张玉书,韩国君. 罗布麻植株构型的研究[J]. 白城师范学院学报,2007,21(6):11 -13,17.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...
引言目前,我国化肥当季利用率平均为30%。其中,氮肥利用率仅为30%~35%,磷肥约为10%~25%,钾肥为35%~50%,不仅远远低于欧美发达国家60%~70%的水平,而且近年来还有下降的趋势。以氮肥为例,20世纪90年代利用率平均约为35%,现今已...