农业机械化论文

0 引言
智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统.该系统可以根据农艺专家的需要,自动生成小区作业图,用于播种时工作人员对作业图的查看和对数据信息的提取.该方法中小区边界的坐标是由精确的数学计算确定的,相对于现在常用的用测量工具量出距离后沿线撒上白石灰,以此作为小区间的分界线的做法,可以节省大量的劳动力,并且所需时间短,生成的作业图更加精确.
1 系统功能设计
该软件可以实现的功能主要有数据输入、图形生成、数据保存、图片保存及打开已保存的数据 5 部分.根据这些功能,确定系统的总体设计方案.由于这 5部分的功能并不复杂,可以将功能按钮直接显示在软件的主页面上,这就涉及到软件用户界面的设计.软件用户界面是指软件用于和用户交流的外观、部件和程序等[2].本软件主要面向农艺专家,可以将软件能够实现的功能一目了然地显示在界面上.
在使用作业图时,需要将小区作业图的坐标和实际的地块坐标对应起来,这就涉及到地头标定的问题.这部分功能利用高斯-克吕格投影将经纬度坐标转换成大地坐标; 再利用三角形面积公式进行标定,确定地块的原点和 x、y 轴.由此将图中的坐标与实际坐标联系起来,建成起方便使用的坐标系.
2 程序设计
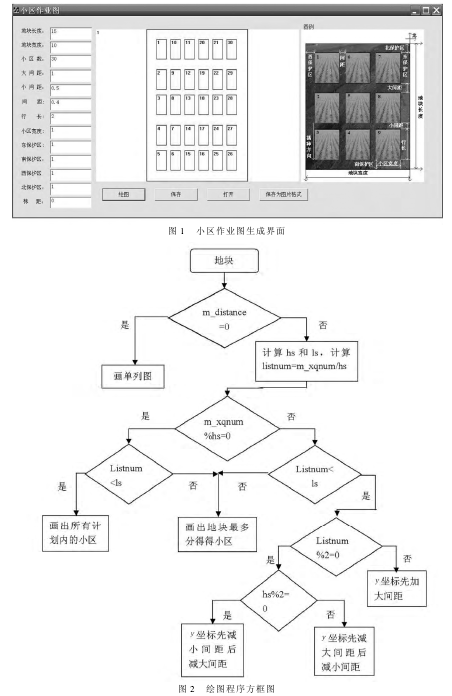
程序的设计主要包括各功能部分的程序设计,如数据的输入、绘图程序的设计、图形保存和数据保存部分程序设计、打开已保存的数据并绘出图形程序设计以及软件的移动传输.输入的数据包括地块长度、地块宽度、小区数、大间距、小间距、间距、行长、小区宽度及东西南北保护区.其中,各保护区的大小受阳光、水分、土质等外界条件影响,大小视具体情况而定.输入的各数据代表的含义在图例中均已标注,如图 1 所示.
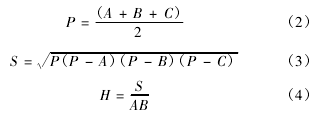
绘图程序框图如图 2 所示.根据不同育种专家的习惯、地块大小及不同作物品种的需要,地块分区有不同的要求,该软件由输入的数据判断图形的样式.图形绘制完成后,将图形和数据分别保存为. bmp格式和. txt 格式,方便以后的调用.打开按钮就是将保存的数据打开并绘制图形.同时,由于所需输入的数据较多,为了方便使用,在软件的右侧配有一张图例,用户可以方便地了解各数据所代表的意义.
3 地头标定及坐标转换
GPS 接收到的信息包括经纬度坐标和速度等信息.要想将所绘制的作业图用于实际的播种工作中,需要将经纬度坐标转化成大地坐标,并与作业图对应起来.这就需要用高斯-克吕格投影进行坐标转换,转换后的长度单位为米,而作业图中的长度单位为像素,将两者按一定的比例对应起来,最后用三角形面积公式进行地头标定.
3. 1 空间坐标与大地坐标的转换
高斯-克吕格投影变换可将空间经纬度坐标转换为平面直角坐标.如果以高斯-克吕格投影中的中央子午线的投影为 X 轴,以赤道的投影为 Y 轴,两轴的交点为原点,就构成了高斯-克吕格平面直角坐标系[3],设大地坐标为( L,B) ,与高斯平面直角坐标( x,y) 之间的函数关系式为

式中 x、y-平面直角坐标系的纵、横坐标;
L、B-椭球面上大地坐标系的经、纬度;
S-由赤道至纬度 B 的子午线弧长;
N-卯酉圈曲率半径;η-η = e'cos2B,其中 e'为地球的第 2 偏心率.
由式( 1) 就可以得到播种机当前在大地上的坐标; 但是此次坐标系包括了整个地球的范围,而地块的面积相对来说极其微小,且地块的方向不一定是正南正北方向.该坐标系使用起来极不方便,这就需要建立自己的坐标系.
3. 2 地头标定及地块方向的确定
坐标系的建立包括确定原点及 x、y 轴方向.原点的确定方法为: 在地头上选定一个点,测出该点的x、y 坐标,设该点的坐标为 0,之后测得的点的坐标均减去原点处实际坐标的值,这样原点就确定了.确定x、y 轴的方向后,坐标系也就建好了.由三角形面积公式可知,如果已知三角形的三边的长度,就可以算出三角形的高.本文中就是利用三角形的高作为 x、y坐标.三角形面积公式为
坐标推导图如图 3 所示.
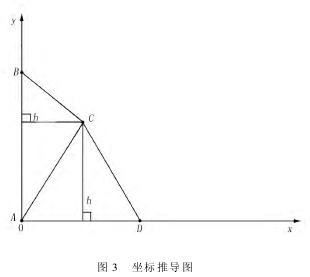
设 A 点为原点,x、y 轴方向如图所示,B、D 分别为y 轴和 x 轴上的点,C 点为地块内任意一点.由三角形面积公式可以算出 △ABC、△ACD 的高,分别作为x、y 轴坐标.利用这种方法的好处是,可以不必考虑地块的实际方向,就可以将 GPS 测得的坐标与作业图坐标吻合.
3. 3 像素与实际测量单位的转换
在实际绘图时,世界坐标系空间中的一个区域要先被映射到页面空间,然后再由页面空间映射到设备空间,再由设备空间映射到物理设备空间,这样图形就在计算机屏幕上显示出来了[4].对于设备空间来说,它的左上角为坐标原点( 0,0) ,向右是 x 增加的方向,向下是 y 增加的方向.在图例中,由于设定的小区 1 为左上角的第 1 个小区,所以坐标设定与物理设备空间的坐标一致.
在应用程序中需要建立设备描述表,并调用 GDI绘图或输出函数,但是几乎所有的 GDI 函数中使用的坐标值都采用的是逻辑单位,Windows 必须将逻辑单位转换为"设备单位"( 即像素) ,而利用高斯-克吕格投影转换成的长度单位为米,所以需要进行实际的长度单位与像素之间的转换.绘图客户区的长与宽的比为 3: 4 在绘图时,如果实际的地块长: 宽>3: 4 时,比例因子为 rect. Height( ) /m_dklength; 否则,比例因子为 rect. Width( ) /m_dkwidth.其中,rect 为控件客户区域.
4 结语
用 Visual C++6. 0 开发的小区作业图生成软件,实现了地块的自动分区; 由图例引导,具有简单实用、界面友好的特点,并可实现数据和图形的双重保存,节省了育种过程中的人力、成本和大量宝贵的时间,提高了育种效率.利用高斯-克吕格投影和三角形面积公式,将作业图坐标与实际地块坐标联系起来,使作业图的使用变为可能.该设计对实现育种过程自动化、提高育种质量具有重要的意义.
参考文献:
[1] 王亮,尚书旗,龚丽农,等. 智能化小区播种机电源系统设计[J]. 机电产品开发与创新,2010,23( 5) : 44-46.
[2] 段涛. 软件界面设计[J]. 工程技术,2011( 6) : 106.
[3] 刘健,刘高峰. 高斯-克吕格投影下的坐标变换算法研究[J]. 计算机仿真,2005,22( 10) : 124-129.
[4] 孙鑫. VC++深入详解[M]. 北京: 电子工业出版社,2012:405.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...
引言目前,我国化肥当季利用率平均为30%。其中,氮肥利用率仅为30%~35%,磷肥约为10%~25%,钾肥为35%~50%,不仅远远低于欧美发达国家60%~70%的水平,而且近年来还有下降的趋势。以氮肥为例,20世纪90年代利用率平均约为35%,现今已...