农业机械化论文

引言
目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有 9 个农场管理局、113 个国有农牧场,农业机械总动力近 600 万 kW,拥有农用大中型拖拉机 4. 5 万台、大中型配套农具 11 万台、机动水稻插秧机 6 万台多、谷物联合收获机械 1 万台多、农用飞机 52 架,已率先实现了机械化作业。随着机械化程度的提高,农机作业范围越来越大,农机作业信息反馈实时性差,不能满足机收的组织者和参与者对信息快捷、准确、详细掌握的要求。目前,国内缺少有效的农机调度手段,不仅降低了农机作业的工作效率和作业质量,也造成了农机的不合理配置,导致了资源的严重浪费,给农机作业的进一步发展带来困难。田间作业机群无线调度系统能够更为科学、合理地调配田间作业机械,使得作业机械不再是单兵作战,而成为科学合理的团队力量,可及时采取调度措施,采用精简、高效的协作方式,避免机械较大故障、轮空、休息的情况发生。采用作业机群无线调度系统后,田间作业机械上配备的信息采集控制器可动态地采集生产信息,迅速、及时地将信息传送到调度中心,为及时、正确的决策提供可靠数据,亦可为农机管理部门提供农田作业的准确信息,为未来的集约化农业生产提供一个良好的示范作用。
1 硬件构成
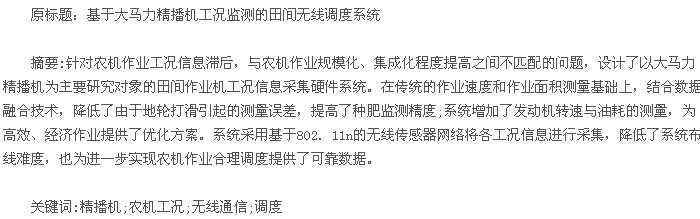
田间作业机无线调度硬件系统以大马力精播机为研究对象,以作业机工作状态监测为重点内容,主要包括播种装置种肥监测、动力设备状态监测、播种机播种面积及作业速度监测。其可在实现本机作业参数监控的同时,利用无线网络技术实时传输作业参数,上位监控机调度决策软件对拖拉机作业进行远程监控与管理调度。系统结构图如图 1 所示。【图1】
种肥监测传感器组为 14 路种肥防堵传感器,监测排种与排肥质量; 发动机转速传感器监测发动机工作状态; GPS 定位传感器、转速传感器监测为计算播种面积及播种量而设置; 油耗传感器为油耗管理提供基础; 采集控制器采集各类经信号调理的传感器信息,通过即插即拔的 SDI 接口与核心控制器联机,实现机车作业状态监测、显示的同时,通过无线通信装置,传输给远程控制中心的调度管理系统进行系统管理。系统为扩展方便,各接口模块均设为即插即用的SDI-12 接口类型。
1. 1 播种装置种肥监测
精播机的种肥监测包括播种量与施肥量监测及导种管、导肥管堵塞状态监测,通过转速传感器测量排种盘和排肥轴转动角度。间接计算获得排种量与排肥量。采用 Allegro 公司的 ATS665 实现转轴转速测量,它是高精度的齿轮边沿传感器,体积小,可以不受安装空间的限制。链轮的每个齿通过传感器的表面时,ATS665 对应产生 1 个电脉冲,脉冲数量与转速之间存在线性关系,计量对应脉冲信号的数量,就可以得到轴转动的角度。
对于排种盘吸孔数为 32 而言,播种量与转轴角度的关系为【1】

其中,z 为链轮齿数; n 为 ATS665 测得脉冲; N 为播种株数。排肥量与转轴转速之间关系为【2】

其中,n1为排肥轴链轮转动产生的脉冲数; z1为排肥轴的链轮齿数; N1为施肥量; a 为排肥轴转动 1周单个排肥管的排肥量。采用光电阵列方式,对 7 行种箱 14 路导管监测,获取种肥堵塞信息。应用半值角小的光电元件( 即 EL-1KL5 发光二极管和 ST-1KL3A 光敏三极管) 3 对并列安装的光电阵列方法,实现堵塞测量,避免光电元件之间的相互干扰和漏检的发生。
光电阵列传感器的控制器与 ATS665 的控制器均采用表贴的 AT89C2051。ATS665 输出的频率信号由4 脚( OUT 端) 进入 MCU1 的 P3. 4,采样控制器对频率信号进行处理、计算,获得转轴转速信息与种肥信息。
采样控制器输出设计为 SDI-12 接口,与主控制器相连。光电阵列进入 MCU2 的 P1. 7、P1. 6、P1. 5 引脚进行采样,判断导种管与肥管的堵塞状态,并将之通过SDI-12 接口传送给主控制器。
1. 2 作业速度与作业面积测量
为提高系统测量精度,采用双轮监测法测量作业速度,进而计算机车行走距离; 将作业幅宽乘以行进距离,计算作业面积。采用多传感器融合技术( 即作业速度采用光电编码器) 与 GPS 联合测量。光电编码器测量驱动轮转速与地轮转速。机车行驶过程中,存在地轮空转、驱动轮与地轮打滑现象。单一测量地轮与驱动轮不能精确获得机车速度,与 GPS 定位传感器联合测量,采用多传感器融合方法,可获得精准作业的速度与位置信息。设置数据融合控制器,光电编码器将地轮/驱动轮角位移转换为电脉冲,进入单片机控制器统计脉冲个数,初步获得机车行驶速度。
GPS 信号以定位为主,采样频率为 1s,田间机车行驶速度 3 ~ 11km/h( 约 0. 83 ~ 3. 05m/s) ,通过测量地轮/驱动轮转动周数,得到机车速度。对 GPS 速度信息与两个光电编码器获得的地轮与驱动轮转速进行数据融合,进而获得机车作业速度。
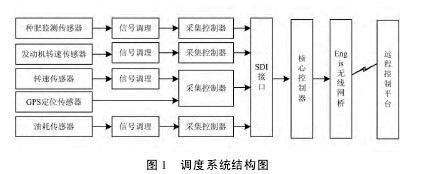
在没有打滑与空转发生时,联合 GPS 测量值,获得精准机车速度。地轮与驱动轮打滑情况下机车作业速度为 0; 地轮空转情况下,即使作业机前行,但作业为无效作业,短时间空转不做处理,只需存储打滑时间,从而计算作业质量。长时间空转则需报警,在有打滑或空转发生时,判断空转与打滑是机车作业速度精准测量的关键。2BJM-7 型驱动轮与地轮的转速比为周长比,考虑测量误差,约为 4: 1,小于此值的转速比认为有地轮空转发生; 在 3s 时间内 GPS 数据无变化,同时 ATS665 传感器有测量值,则认为地轮或驱动轮在打滑。3 个传感器采用串并联数据融合结构进行表决,传感器输出与一个融合逻辑器相连,该融合逻辑器事先结合了各传感器的先验知识。表决算法基于布尔代数,GPS 传感器信任级别最高,驱动轮转速传感器次之,地轮转速传感器最低,如表 1 所示。【表1】
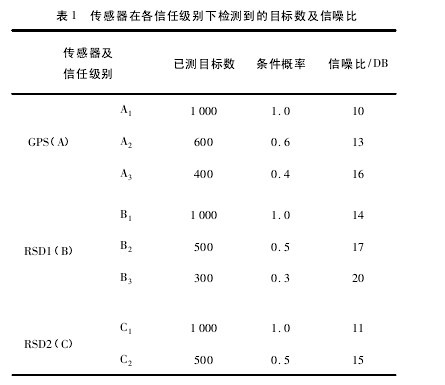
系统的检测率为【公式】
B、C 的信任级别为 x ( x = 1,2,3 ) 的检测率; 对应的Pfa( Ax) 、Pfa( Bx) 、Pfa( Cx) 为虚警率。经计算,系统的检测率为 0. 84,虚警率为 9. 9×10-7,小于 10-6,与单个传感器相比,提高了测量的准确度,降低了测量误差。上述数据融合过程在融合控制器中完成。
1. 3 射频导纳原理的机车油耗传感器W3000 系列射频导纳物位开关是采用先进的射频导纳技术液位测量传感器,它能减小或消除由被测导电介质电极挂料引起的测量误差,从而提高电容式液位计的测量准确度,具有安装方便、免维护及低价位等特点。射频导纳中导纳的含义为电学中阻抗的倒数,它由电阻性成分、电容性成分、感性成分综合而成。被测量的复阻抗 X 为【5】
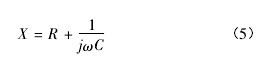
其中,C 为物料和挂料的电容 Cw、Cg的并联值; R为挂料部分和真实物料部分的电阻串联值。根据射频导纳原理,挂料部分复阻抗的实部和虚部数值上相等,即【6】

由于挂料部分的横截面积要远远小于物料部分的横截面积,挂料部分的电阻要远远大于物料部分的电阻,可以忽略物料部分电阻。因此,由式( 5) 与式( 6)可得【7】
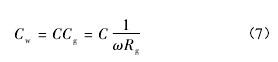
因此,只要测得被测液体的复阻抗的实部和虚部,就可以准确得出液位形成的电容,消除挂料电容的影响,进而消除由于挂料电容所造成虚假液位的误差。所测液位的输出信号是由真实液位和挂料分别引起的信号的叠加: 通过测量激励电压信号矢量电压和响应电流信号矢量得到被测液体的复阻抗值; 通过相敏检波得到实部和虚部的值,计算真实的液位信号。射频导纳油耗传感器由开关电子线路和探头两部分组成: 电子线路包括高频振荡器、检测电路、输出电路; 探头由探测极棒及保护套构成,二者之间以及它们与接地容器之间相互绝缘,由高频振荡器提供稳定的射频电压,传到探测极棒上,当物料触及到探测极棒时,输出不平衡电压,经解调器、放大器处理后,进入采集控制器。
1. 4 传感器接口
系统所有传感器接口均设计为即插即用型的 SDI-12 接口形式。SDI -12 适用于多传感器的单数据记录,采用串行数据接口,SDI 传输速率为 1 200bps,通信协议采用三线制,包括+12V 电源线、数据线和地线。通过软件设置传感器地址,实现该传感器和主机的通信。SDI-12 的数据结构协议为 1 位起始位、7 位数据位( 低位在前) 、1 位偶校验位、1 位停止位。
SDI-12 标准的数据采集器的测量过程如下: 唤醒传感器→寻址,发送命令→传感器响应→传送数据。使用SDI-12 接口通信协议,使多传感器互联设计变得简单,减少了硬件接口电路的设计。
2 无线传输接口
农业机械工作在大田环境,作业面积宽广,在耕田内走线易腐蚀及遭到破坏,田间作业机群处于活动状态,通过有线方式将机载信号传送给远程调度管理中心是不可能的。因而,采用无线通信方式将田间作业机的实测数据经过无线传输设备传递到控制室,经上位机计算,合理安排调度措施。无线传输采用 WiFi( 802. 11n) 技术,5. 8GHz,点对点通信距离 1km,网络拓扑采用中继模式。每台作业机在上位机配有单个网桥 AP 节点,进行数据收发,在田间设有中继网桥,实现数据无线传输到控制室。无线信号的载体采用IEEE802. 11n 标准的网桥实现。该网桥为双频工作模式( 包含 2. 4GHz 和 5GHz 两个工作频段) ,数据传输速率可达 100Mbit/s,传输距离可达几公里。作业机单个节点连接方式见图 2 所示。【图2】
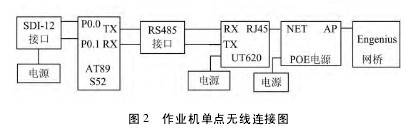
图 2 中,AT89S52 为核心控制器,接收来自 SDI-12 接口的采集数据,将其通过 RS485 串行口与 UT620连接; UT620 为数据转换器,将 RS485 的串行数据形式转换为 Engenius 网桥所用的 RJ45 的网络数据格式; POE 电源为网桥供电。所有电源均为直流形式,不超过 12V,采用机载电平供电。
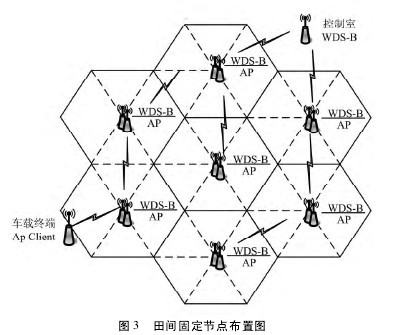
作业机终端数据通过无线网传输给控制室内调度机。网络主要构成包括无线链路链接路由器和终端设备,网络中的任何无线设备及节点都可以同时作为 AP 和路由器,每个节点都可以发送和接收数据,与一个或者多个对等节点进行直接通信。设置节点以1km 为有效距离,每个节点布置在边长为 1km 的正六边形中心,保证作业机工作中移动到任何位置均在网络内。每个节点具有收集数据功能,又具有路由功能,由两个 Engenius 网桥构成: 一个用于对多个车载终端信号的接收,设置为 AP 方式; 另一个用于数据路由器,工作于 WDS-Brigde 形式。田间固定网络节点布置及网络拓扑图如图 3 所示。图 3 中未画出所有路由方式。控制室终端收集所有田间固定点信息,为WDS-Brigde 形式,设置智能天线,扩大其覆盖范围。【图3】
3 上位机调度管理
田间作业机群无线调度系统上位机采用的 Delphi语言进行系统的软件设计,主要包括作业机群实时监控界面、播种机信息管理界面、播种机工作状态界面、工作区块管理界面及播种机调度管理界面。调度系统部署说明如下:
1) 作业机群车载主控终端采用无线网桥的无线网络实现和调度室的数据传输,即时将机群所处位置把 GPS 定位数据及工作状态,通过无线网络报送到网站数据接收服务器。
2) 调度室通过远程调度软件监控机群中每个播种机的工作状态,包括是否工作完成、完成了多少、作业速度、油耗、机械的工作状态等信息。
3) 农业机械到达作业地点之后将完成所指派作业任务,之后将作业完毕信息通过无线网络发送到调度指挥中心。
4) 调度中心获得播种机的详细地理信息数据之后,确定播种机行驶目的地,优化最佳行驶路线,开始导航指导农机前往作业地点。
作业机群实时监控界面如图 4 所示。其左侧显示机群中播种机的名字; 点击后,右侧出现该播种机的工作状态,包括位置信息、机械型号、制造年份、机主电话、已播面积、行驶速度、油耗、工作状态、工作区块、工作完成后将要前往的区块、现工作区块的详细信息,以及目标区块的信息; 当作业完成后,点击发送按钮,播种机前往目标区块工作。【图4略】
4 结论
大马力精播机的田间无线调度系统采用数据融合方法,解决了地轮打滑导致的作业速度及测量精度下降的问题; 油耗管理设备的引入增强了机车管理的实效性,采用的是小功率合法频段实现作业区机车调度,不会对其它无线设备造成干扰。在实现机车调度的同时,完成大田无线组网工程,开放的网络为田间现代信息管理设备提供基础网络设施。
参考文献:
[1] 金攀. 精准农业技术在农机合作社作业管理中的应用[J]. 农业开发与装备,2010( 10) : 56-58.
[2] 赵斌,匡丽红,张伟,等. 气吸式精播机种、肥作业智能计量监测系统[J]. 农业工程学报,2010,26( 2) : 147-153.
[3] 冯娟,曾立华,史智兴. 一种双轮测量农机具行进速度和距离的装置[J]. 农机化研究,2008( 6) : 142-144.
[4] 黄操军,陶冶,许秀英. 基于 SDI-12 的播种机种肥监测传感器研究[J]. 黑龙江八一农垦大学学报,2012( 4) : 80-83.
[5] 高玉璐. 免耕播种机地轮滑移现象的研究[D]. 北京: 中国农业大学,2001.
[6] 印祥. 拖拉机打滑率测试系统及其虚拟测试的研究开发[D]. 杨凌: 西北农林科技大学,2011.
[7] 卢悦. 基于 C8051F120 的多传感器融合的智能定位装置的设计[D]. 昆明: 昆明理工大学,2011.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...
引言目前,我国化肥当季利用率平均为30%。其中,氮肥利用率仅为30%~35%,磷肥约为10%~25%,钾肥为35%~50%,不仅远远低于欧美发达国家60%~70%的水平,而且近年来还有下降的趋势。以氮肥为例,20世纪90年代利用率平均约为35%,现今已...